






使用PAL库发送字符串指令

app_blink_led.h/c已经在之前的学习中写过了 所以只需要复制到工程来即可 只需要重新写app_cmd.c/h
(使用PAL库)
编程思路
字符串指令编解码器 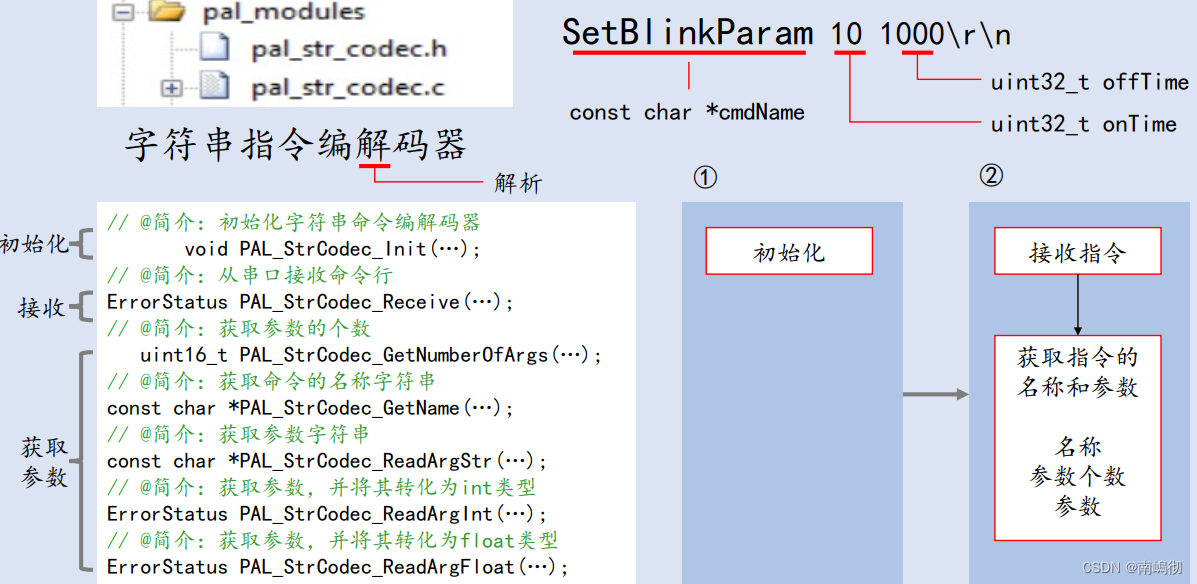
比如字符串指令 SetBlinkParam 10 1000这个字符串指令第一个有用的信息是指令名称 第二个参数是10 第三个参数是1000 接下来就是把指令分析和提取
字符串指令的指令用一个字符数组接收 后面两个参数就是用 两个32位变量来接收
使用这个库函数 首先需要初始化字符串命令编码器 调用第一个接口 
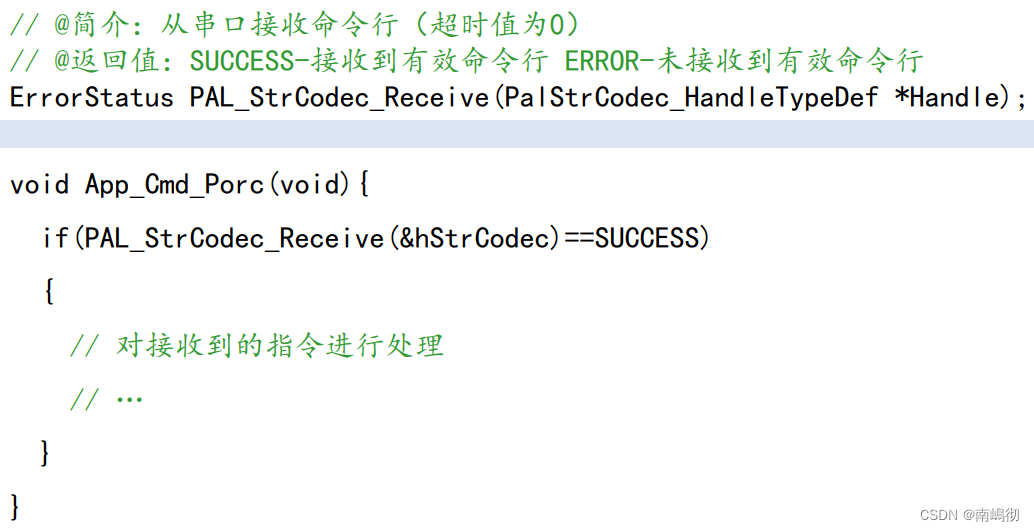
第二步就是从串口处接收命令
初始化编解码器 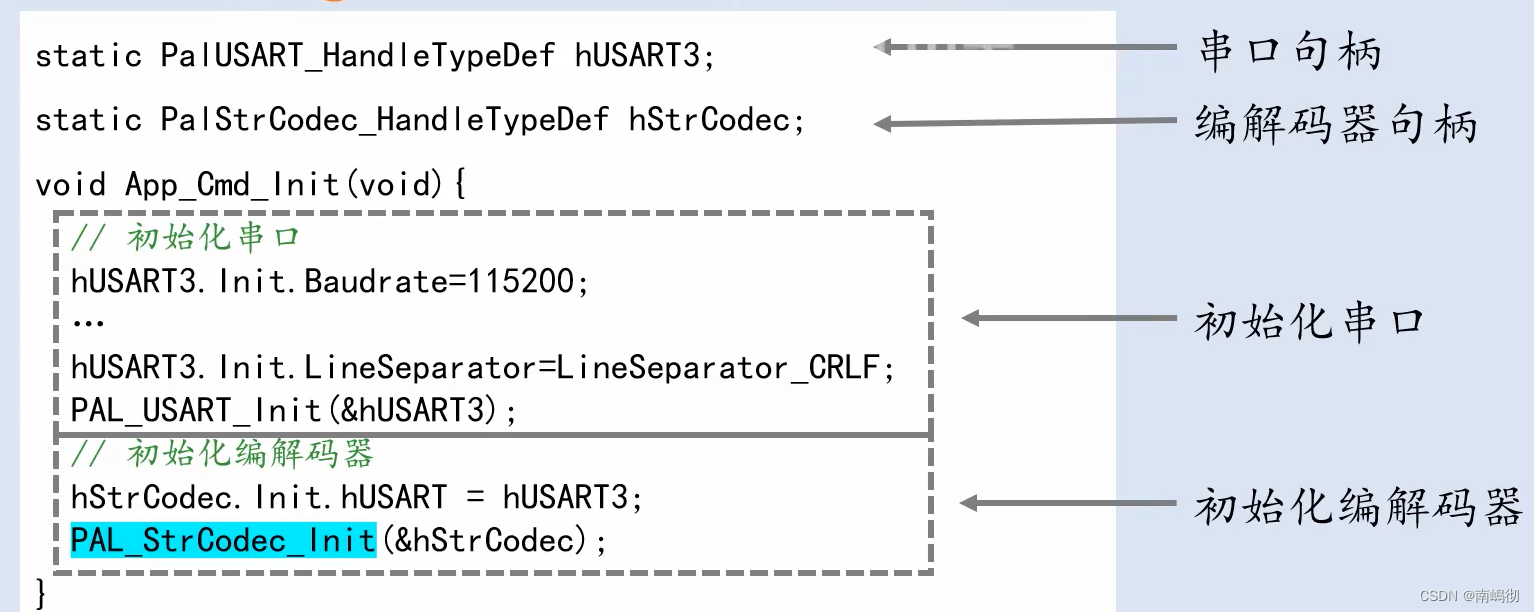
因为编解码器需要从串口处接收字符串命令 所以初始化编解码器之前需要先初始化一个串口 初始化编解码器第一个参数就是初始化串口的句柄
初始化代码
#include "app_cmd.h"
#include "stm32f10x_pal_usart.h"
#include "pal_str_codec.h"
static PalUSART_HandleTypeDef hUSART3;
static PalStrCodec_HandleTypeDef hStrCodec;
void App_Cmd_Init(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
hUSART3.Init.BaudRate = 115200;
hUSART3.Init.USARTx = USART3;
hUSART3.Init.USART_WordLength = USART_WordLength_8b;
hUSART3.Init.USART_Parity = USART_Parity_No;
hUSART3.Init.USART_StopBits = USART_StopBits_1;
hUSART3.Init.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
hUSART3.Init.USART_IRQ_PreemptionPriority = 0;
hUSART3.Init.USART_IRQ_SubPriority = 0;
hUSART3.Init.RxBufferSize = 128;
hUSART3.Init.TxBufferSize = 128;
hUSART3.Init.Advanced.LineSeparator = LineSeparator_CRLF;
PAL_USART_Init(&hUSART3);
hStrCodec.Init.hUSART = &hUSART3;
PAL_StrCodec_Init(&hStrCodec);
}
接收命令行
获取指令名称和参数
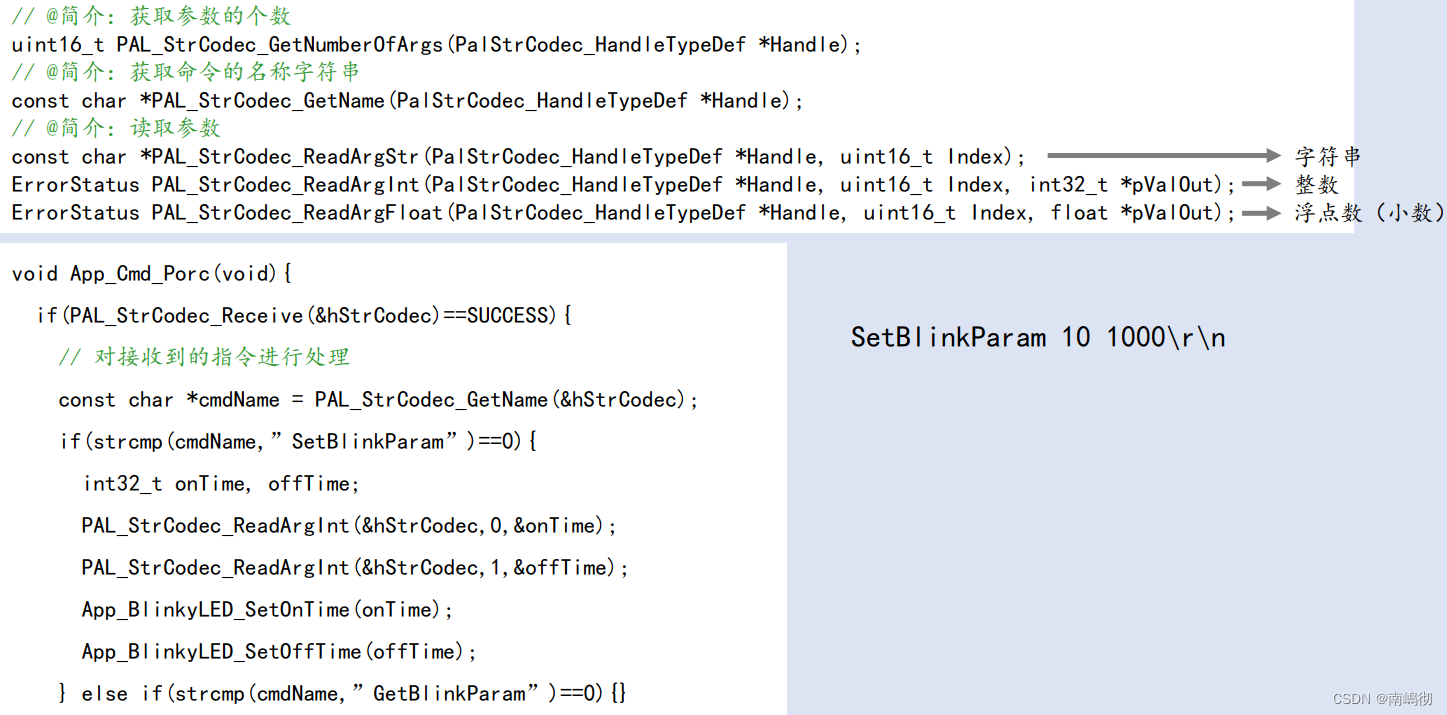
接收参数的函数接口的第二个参数就是 0 或者1 比如指令SetBlinkParam 10 1000 第一个参数就是10 所以在调用函数接口时的参数填0表示第一个参数 第二个参数1000 就填1表示第二个参数 注意初始化的OnTime 和OffTime要和函数接口的参数类型一直 都是int32 类型
#include "app_cmd.h"
#include "stm32f10x_pal_usart.h"
#include "pal_str_codec.h"
#include <string.h>
#include "app_blinky_led.h"
static PalUSART_HandleTypeDef hUSART3;
static PalStrCodec_HandleTypeDef hStrCodec;
void App_Cmd_Init(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
hUSART3.Init.BaudRate = 115200;
hUSART3.Init.USARTx = USART3;
hUSART3.Init.USART_WordLength = USART_WordLength_8b;
hUSART3.Init.USART_Parity = USART_Parity_No;
hUSART3.Init.USART_StopBits = USART_StopBits_1;
hUSART3.Init.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
hUSART3.Init.USART_IRQ_PreemptionPriority = 0;
hUSART3.Init.USART_IRQ_SubPriority = 0;
hUSART3.Init.RxBufferSize = 128;
hUSART3.Init.TxBufferSize = 128;
hUSART3.Init.Advanced.LineSeparator = LineSeparator_CRLF;
PAL_USART_Init(&hUSART3);
hStrCodec.Init.hUSART = &hUSART3;
PAL_StrCodec_Init(&hStrCodec);
}
void App_Cmd_Proc(void)
{
int32_t OnTime,OffTime;
if(PAL_StrCodec_Receive(&hStrCodec) ==SUCCESS)
{
const char*cmdName = PAL_StrCodec_GetName(&hStrCodec);
if(strcmp(cmdName,"SetBlinkParam") ==0)
{
PAL_StrCodec_ReadArgInt(&hStrCodec,0,&OnTime);
PAL_StrCodec_ReadArgInt(&hStrCodec,1,&OffTime);
App_BlinkyLED_SetOnTime(OnTime);
App_BlinkyLED_SetOnTime(OffTime);
//对上位机反馈 OK\r\n\r\n
PAL_USART_SendString(&hUSART3,"OK\r\n\r\n");
}
else if(strcmp(cmdName,"GetBlinkParam") == 0)
{
OnTime = App_BlinkyLED_GetOnTime();
OffTime = App_BlinkyLED_GetOffTime();
//给上位机进行反馈
PAL_USART_Printf(&hUSART3,"OK\r\r\nOnTime = %d, OffTime = %d\r\n",OnTime,OffTime);
}
}
}
void USART3_IRQHandler(void)
{
PAL_USART_IRQHandler(&hUSART3);
}
改进
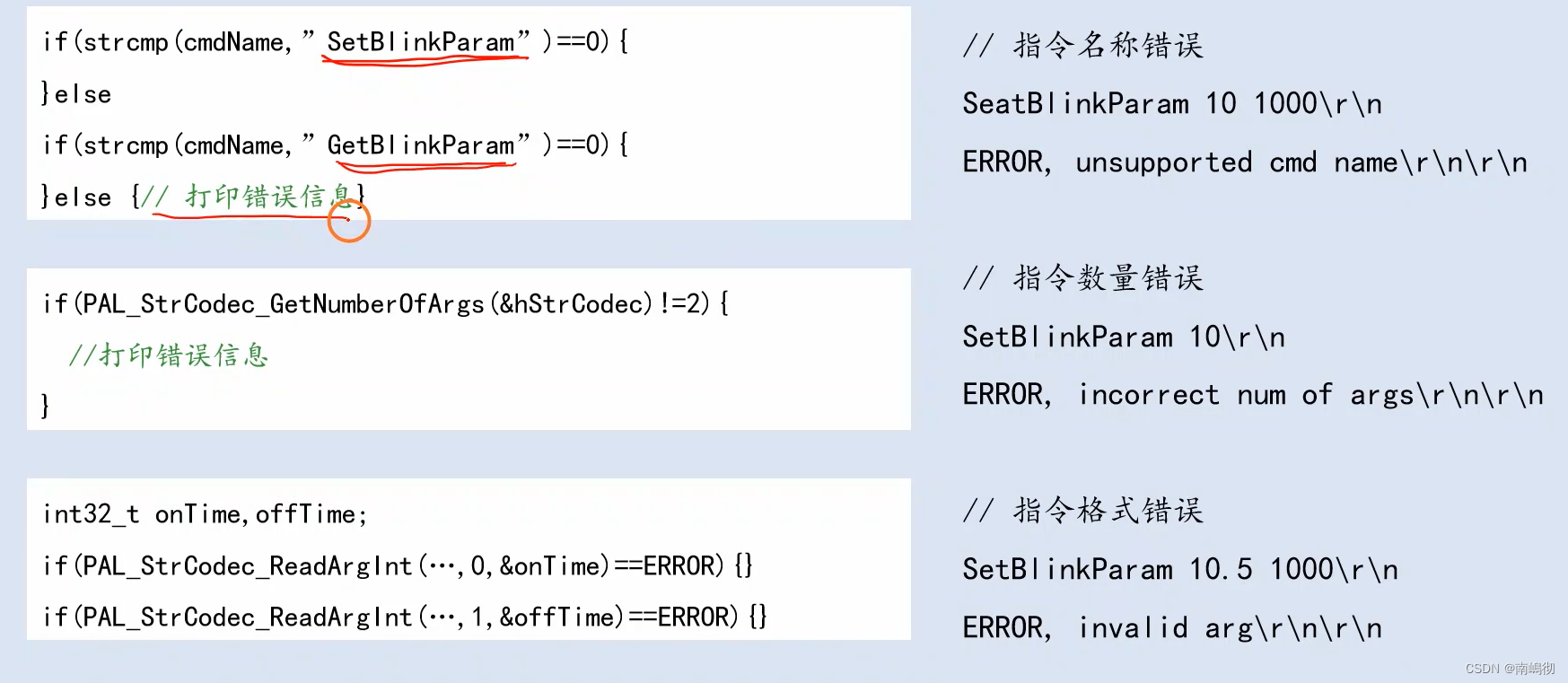
整个app_cmd.c代码
#include "app_cmd.h"
#include "stm32f10x_pal_usart.h"
#include "pal_str_codec.h"
#include <string.h>
#include "app_blinky_led.h"
static PalUSART_HandleTypeDef hUSART3;
static PalStrCodec_HandleTypeDef hStrCodec;
void App_Cmd_Init(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
hUSART3.Init.BaudRate = 115200;
hUSART3.Init.USARTx = USART3;
hUSART3.Init.USART_WordLength = USART_WordLength_8b;
hUSART3.Init.USART_Parity = USART_Parity_No;
hUSART3.Init.USART_StopBits = USART_StopBits_1;
hUSART3.Init.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
hUSART3.Init.USART_IRQ_PreemptionPriority = 0;
hUSART3.Init.USART_IRQ_SubPriority = 0;
hUSART3.Init.RxBufferSize = 128;
hUSART3.Init.TxBufferSize = 128;
hUSART3.Init.Advanced.LineSeparator = LineSeparator_CRLF;
PAL_USART_Init(&hUSART3);
hStrCodec.Init.hUSART = &hUSART3;
PAL_StrCodec_Init(&hStrCodec);
}
void App_Cmd_Proc(void)
{
int32_t OnTime,OffTime;
if(PAL_StrCodec_Receive(&hStrCodec) ==SUCCESS)
{
const char*cmdName = PAL_StrCodec_GetName(&hStrCodec);
if(strcmp(cmdName,"SetBlinkParam") ==0)
{
if(PAL_StrCodec_GetNumberOfArgs(&hStrCodec) !=2)
{
//ERROR,incorrect number of args\r\n\r\n
PAL_USART_SendString(&hUSART3,"ERROR,incorrect number of args\r\n\r\n");
}
else
{
if(PAL_StrCodec_ReadArgInt(&hStrCodec,0,&OnTime) == ERROR
||PAL_StrCodec_ReadArgInt(&hStrCodec,1,&OffTime) == ERROR )
{
PAL_USART_SendString(&hUSART3,"ERROR, invalid arg\r\n\r\n");
}
else
{
App_BlinkyLED_SetOnTime(OnTime);
App_BlinkyLED_SetOnTime(OffTime);
//对上位机反馈 OK\r\n\r\n
PAL_USART_SendString(&hUSART3,"OK\r\n\r\n");
}
}
}
else if(strcmp(cmdName,"GetBlinkParam") == 0)
{
OnTime = App_BlinkyLED_GetOnTime();
OffTime = App_BlinkyLED_GetOffTime();
//给上位机进行反馈
PAL_USART_Printf(&hUSART3,"OK\r\r\nOnTime = %d, OffTime = %d\r\n",OnTime,OffTime);
}
else
{
//ERROR,unsupported cmd name \r\n\r\n
PAL_USART_SendString(&hUSART3,"ERROR,unsupported cmd name \r\n\r\n");
}
}
}
void USART3_IRQHandler(void)
{
PAL_USART_IRQHandler(&hUSART3);
}















 1911
1911











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









