







一、设计目的
-
掌握层次聚类算法原理:通过实现DIANA(分裂式层次聚类)算法,深入理解自顶向下的聚类策略与簇分裂机制。
-
探索分裂式聚类评估方法:实践簇直径计算、平均相异度比较等核心指标,掌握簇质量评估标准。
-
强化算法可视化能力:通过动态展示簇分裂过程,直观呈现数据点归属变化,提升算法过程的可解释性。
-
培养工程化实现思维:从数据结构设计到模块化编程,实现算法开发全流程,提升Python复杂项目实现能力。
二、设计描述
针对课程设计(五)中的样本事务数据库,使用DIANA算法,算法执行步骤如下表所示:
表 DIANA 算法执行过程
| 步骤 | 具有最大直径的簇 | splinter group | old party |
|---|---|---|---|
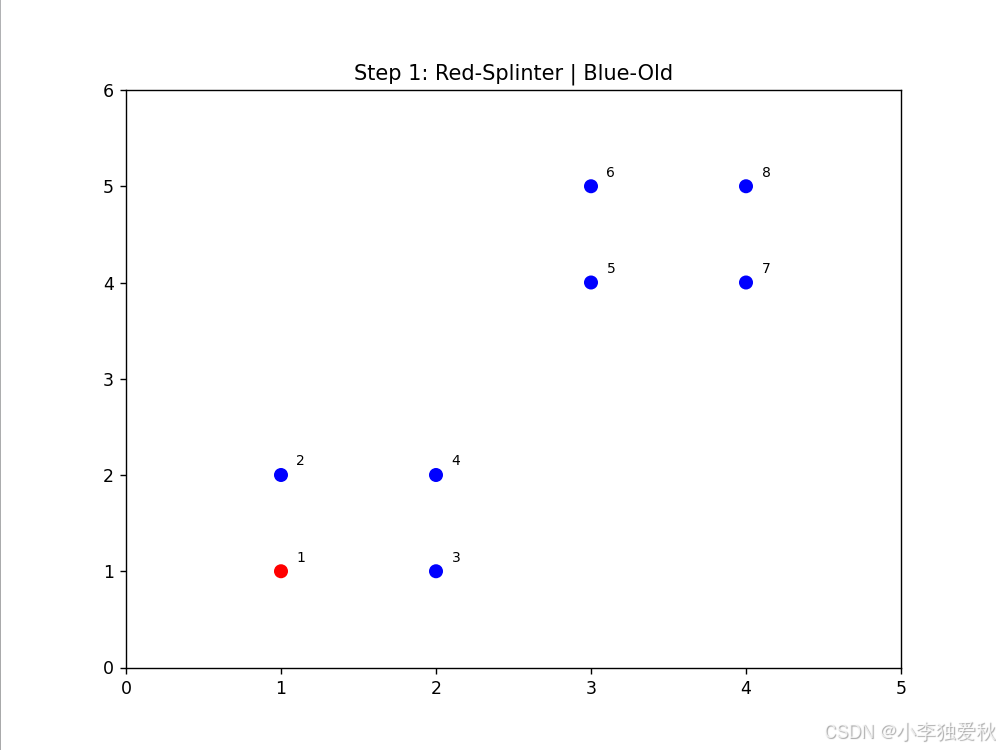
| 1 | {1, 2, 3, 4, 5, 6, 7, 8} | {1} | {2, 3, 4, 5, 6, 7, 8} |
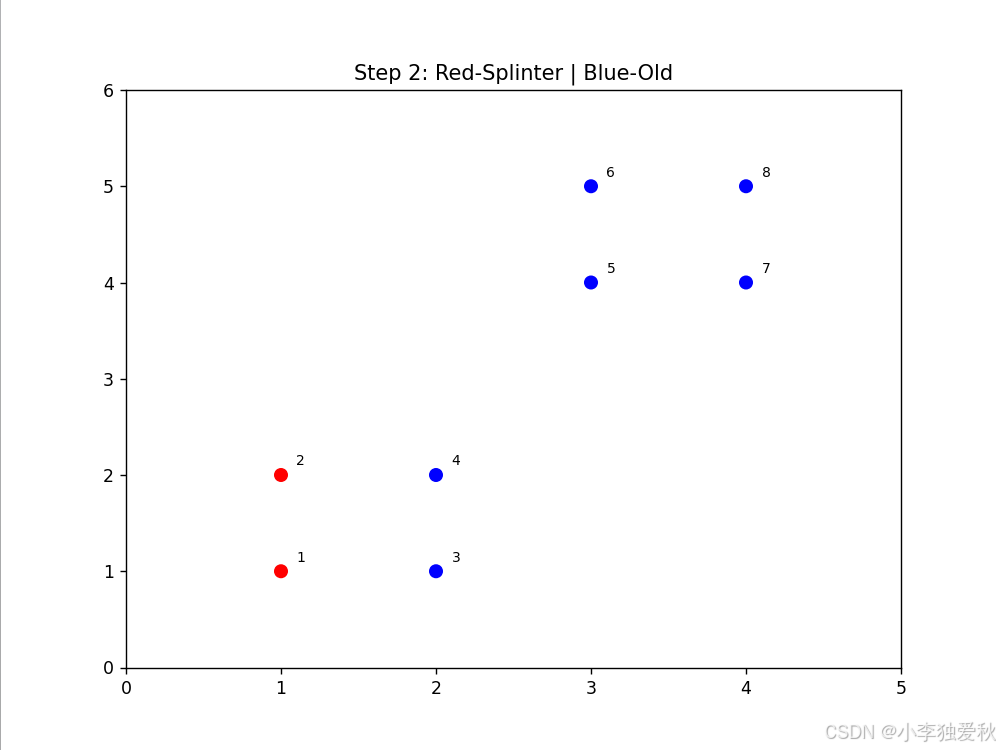
| 2 | {1, 2, 3, 4, 5, 6, 7, 8} | {1, 2} | {3, 4, 5, 6, 7, 8} |
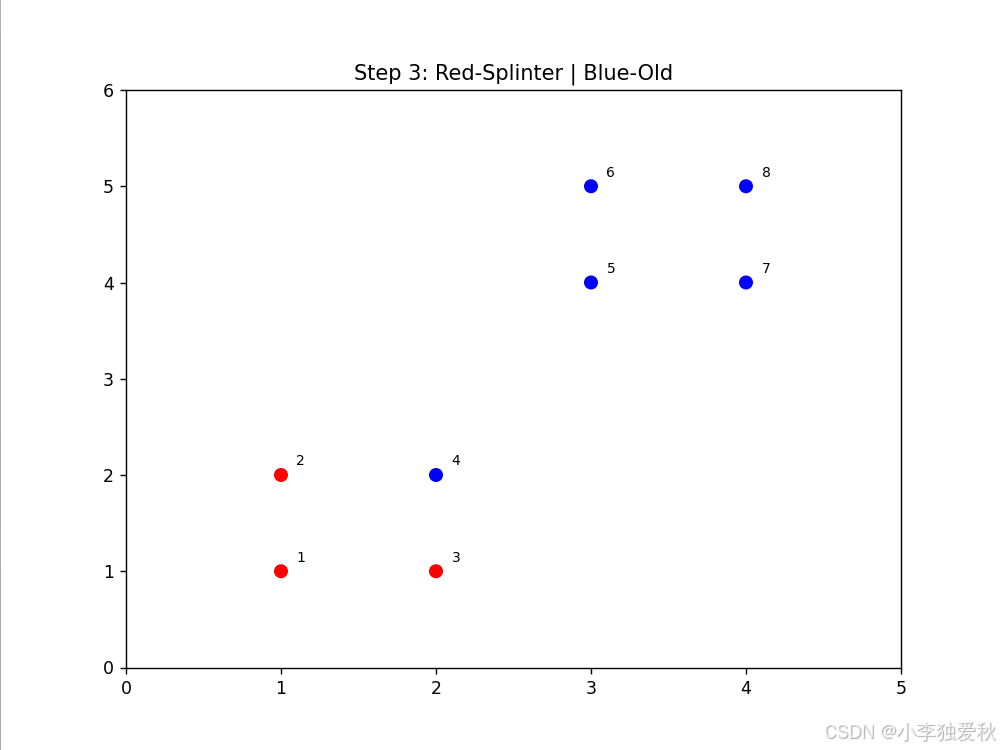
| 3 | {1, 2, 3, 4, 5, 6, 7, 8} | {1, 2, 3} | {4, 5, 6, 7, 8} |
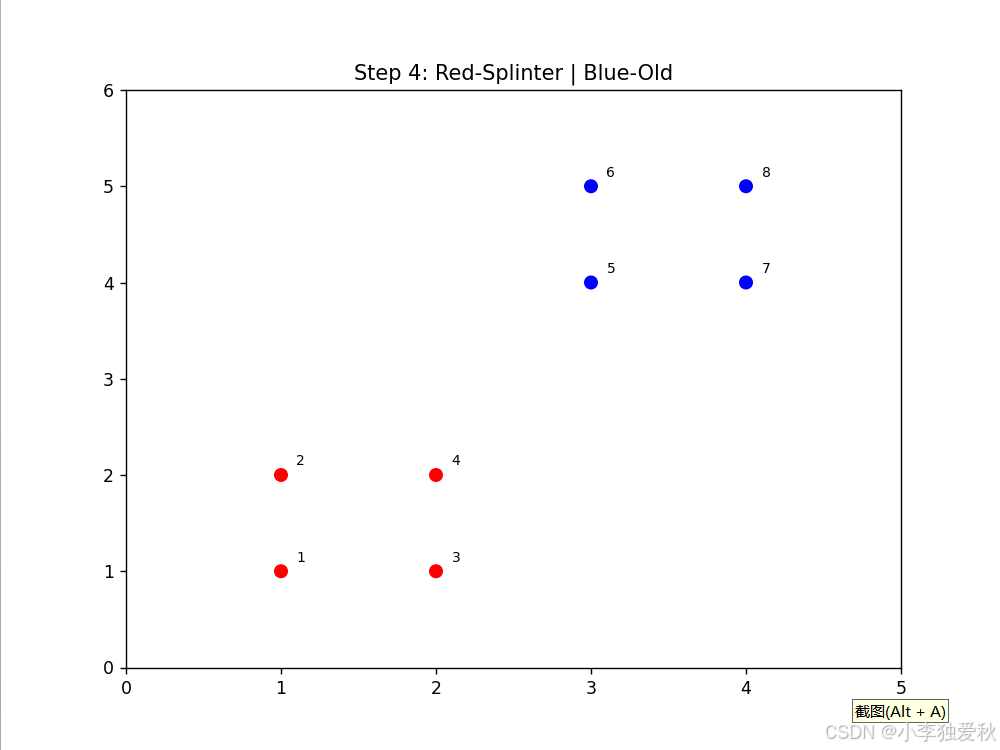
| 4 | {1, 2, 3, 4, 5, 6, 7, 8} | {1, 2, 3, 4} | {5, 6, 7, 8} |
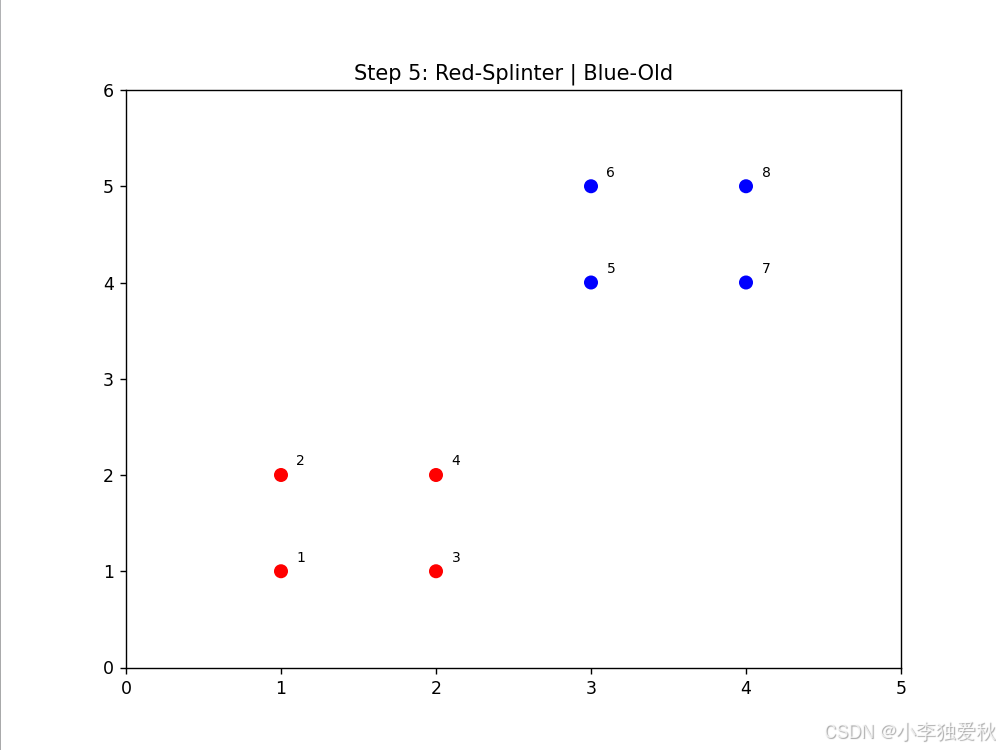
| 5 | {1, 2, 3, 4, 5, 6, 7, 8} | {1, 2, 3, 4} | {5, 6, 7, 8} 终止 |
具体步骤如下:
(1)找到具有最大直径的簇,对簇中的每个点计算平均相异度(假定采用的是欧式距离)。点1的平均距离为(1 + 1.414 + 3.6 + 4.24 + 4.47 + 5)/7 = 2.96,点2的平均距离为(1 + 1.414 + 1 + 2.828 + 3.6 + 3.6 + 4.24)/7 = 2.526,点3的平均距离为(1 + 1.414 + 1 + 3.16 + 4.12 + 3.6 + 4.47) / 7 = 2.68, 点 4 的平均距离为 (1.414 + 1 + 1 + 2.24 + 3.16 + 2.828 + 3.6) / 7 = 2.18, 点 5 的平均距离为 2.18, 点 6 的平均距离为 2.68, 点 7 的平均距离为 2.526, 点 8 的平均距离为 2.96。这时挑出平均相异度最大的点 1 放到 splinter group 中, 剩余点在 old party 中。
(2) 在 old party 里找出到 splinter group 中的最近的点的距离不大于到 old party 中最近的点的距离的点, 将该点放入 splinter group 中, 该点是 2。
(3) 重复第 (2) 步的工作, 在 splinter group 中放入点 3。
(4) 重复第 (2) 步的工作, 在 splinter group 中放入点 4。
(5) 没有新的 old party 中的点分配给 splinter group, 此时分裂的簇数为 2, 达到终止条件。如果没有到终止条件, 下一阶段还会从分裂好的簇中选一个直径最大的簇按刚才的分裂方法继续分裂。
三、设计过程
3.1 数据预处理
3.1.1 数据收集与构造
-
人工构造数据集
采用8个二维空间点作为实验数据,属性值范围为:- 属性1:1~4(横向坐标)
- 属性2:1~5(纵向坐标)
- 数据点分布示例:
(1,1), (1,2), (2,1), (2,2), (3,4), (3,5), (4,4), (4,5)
-
数据结构定义
使用Pandas DataFrame存储原始数据,包含三列:- 序号:1~8(唯一标识)
- 属性1:数值型特征
- 属性2:数值型特征
3.1.2 数据清洗与校验
-
缺失值处理
检查数据完整性,确认无缺失值(实验数据为完整构造) -
异常值检测
通过描述性统计验证数据范围:- 属性1:min=1, max=4
- 属性2:min=1, max=5
- 确认无超出预期范围的异常点
3.1.3 数据结构转换
-
坐标字典构建
将DataFrame转换为字典结构:points = { 1: (1,1), 2: (1,2), ..., 8: (4,5) }- 键:数据点序号(int)
- 值:元组存储坐标(tuple)
-
访问优化设计
实现O(1)时间复杂度坐标查询,支持快速距离计算
3.1.4 数据标准化(可选)
- Min-Max标准化
公式:x' = (x - min) / (max - min)- 属性1范围:1~4 → 0~1
- 属性2范围:1~5 → 0~1
- 本实验未采用(保持原始空间分布)
3.1.5 数据初始化
-
初始簇创建
self.original_cluster = {1,2,3,4,5,6,7,8}- 使用集合存储簇成员,支持快速集合运算
-
动态存储结构
clusters:列表存储当前所有簇(初始为全集)steps:列表记录每次分裂的中间状态
3.2 算法设计逻辑
3.2.1 簇直径计算
- 双重循环遍历簇内所有点对
- 使用
scipy.spatial.distance.euclidean计算欧氏距离 - 时间复杂度:O(n²),适用于中小规模数据集
3.2.2 平均相异度评估
- 对每个点计算与簇内其他点的平均距离
- 公式:
total/(len(cluster)-1),排除自身点影响
3.2.3 分裂点确定策略
- 选择平均相异度最大的点作为初始分裂点
find_splinter_point函数实现最大差异度搜索
3.2.4 迭代分裂过程
- 动态维护splinter与old两个子簇
should_move函数通过最近邻比较决定点迁移- 采用逐步迁移策略,每次只移动一个点
3.3 算法核心模块实现
3.3.1 簇分裂步骤控制
def cluster_step(self):
while True:
moved = False
for p in sorted(old):
if self.should_move(...):
# 点迁移与状态更新
moved = True
break
if not moved: break3.3.2 动态颜色更新机制
- 通过
FuncAnimation实现逐帧更新 - 颜色编码:红(splinter)、蓝(old)、灰(其他簇)
- 文本标注显示数据点编号
3.3.3 表格格式化输出
- 动态计算中英文字符显示宽度
- 使用全角空格(
- 终止标识符标记最终状态
3.3.4 源代码示例
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from matplotlib.animation import FuncAnimation
from scipy.spatial.distance import euclidean
class DIANA:
def __init__(self, data):
self.points = {row['序号']: (row['属性1'], row['属性2'])
for _, row in data.iterrows()}
self.original_cluster = set(self.points.keys())
self.clusters = [self.original_cluster.copy()]
self.steps = []
def calculate_diameter(self, cluster):
max_dist = 0
points = list(cluster)
for i in range(len(points)):
for j in range(i+1, len(points)):
dist = euclidean(self.points[points[i]], self.points[points[j]])
max_dist = max(max_dist, dist)
return max_dist
def average_dissimilarity(self, point, cluster):
total = 0.0
for p in cluster:
if p != point:
total += euclidean(self.points[point], self.points[p])
return total / (len(cluster)-1) if len(cluster)>1 else 0
def find_splinter_point(self, cluster):
avg_diss = {p: self.average_dissimilarity(p, cluster) for p in cluster}
return max(avg_diss, key=avg_diss.get)
def should_move(self, p, splinter, old):
if not splinter or not old:
return False
min_splinter = min(euclidean(self.points[p], self.points[s]) for s in splinter)
min_old = min(euclidean(self.points[p], self.points[o]) for o in old if o != p)
return min_splinter <= min_old
def cluster_step(self):
main_cluster = self.original_cluster.copy()
splinter = {self.find_splinter_point(main_cluster)}
old = main_cluster - splinter
self.steps.append({
'main_cluster': main_cluster.copy(),
'splinter': splinter.copy(),
'old': old.copy()
})
while True:
moved = False
for p in sorted(old):
if self.should_move(p, splinter, old):
splinter.add(p)
old.remove(p)
self.steps.append({
'main_cluster': main_cluster.copy(),
'splinter': splinter.copy(),
'old': old.copy()
})
moved = True
break
if not moved:
self.steps.append({
'main_cluster': main_cluster.copy(),
'splinter': splinter.copy(),
'old': old.copy()
})
break
self.clusters.remove(main_cluster)
self.clusters.extend([splinter, old])
def generate_animation(self):
fig, ax = plt.subplots(figsize=(8, 6))
ax.set_xlim(0, 5)
ax.set_ylim(0, 6)
colors = ['gray'] * len(self.points)
scat = ax.scatter([v[0] for v in self.points.values()],
[v[1] for v in self.points.values()],
c=colors, s=50)
for pid, (x, y) in self.points.items():
ax.text(x + 0.1, y + 0.1, str(pid), fontsize=8)
def update(frame):
current = self.steps[frame]
new_colors = []
for pid in sorted(self.points.keys()):
if pid in current['splinter']:
new_colors.append('red')
elif pid in current['old']:
new_colors.append('blue')
else:
new_colors.append('gray')
scat.set_color(new_colors)
ax.set_title(f"Step {frame+1}: Red-Splinter | Blue-Old")
return scat,
ani = FuncAnimation(fig, update, frames=len(self.steps),
interval=1000, blit=False)
plt.show()
def print_steps(self):
# 辅助函数:精确计算显示宽度(中文2字符,英文1字符)
def get_display_width(s):
return sum(2 if '\u4e00' <= c <= '\u9fff' else 1 for c in s)
# 准备数据
headers = ["步骤", "具有最大直径的簇", "splinter group", "old party"]
rows = []
# 生成所有行数据(特别注意最后一行终止符)
for i, step in enumerate(self.steps):
main = "{" + ", ".join(map(str, sorted(step['main_cluster']))) + "}"
splinter = "{" + ", ".join(map(str, sorted(step['splinter']))) + "}"
old = "{" + ", ".join(map(str, sorted(step['old']))) + ("}终止" if i == len(self.steps)-1 else "}")
rows.append((str(i+1), main, splinter, old))
# 计算列宽(包含中文字符补偿)
col_widths = [
max(get_display_width(str(row[i])) for row in [headers] + rows)
for i in range(4)
]
# 构建精确的格式字符串(使用全角空格对齐)
fmt_str = "{{step:<{w0}}}\t{{main:<{w1}}}\t{{splinter:<{w2}}}\t{{old:<{w3}}}".format(
w0=col_widths[0],
w1=col_widths[1],
w2=col_widths[2],
w3=col_widths[3]
)
# 打印表头(二次校准)
print(fmt_str.format(
step=headers[0],
main=headers[1],
splinter=headers[2],
old=headers[3]
).replace("\t", " ")) # 用全角空格替换制表符
# 打印数据行
for row in rows:
print(fmt_str.format(
step=row[0],
main=row[1],
splinter=row[2],
old=row[3]
).replace("\t", " ")) # 保持全角空格对齐
# 数据准备
data = pd.DataFrame({
'序号': [1, 2, 3, 4, 5, 6, 7, 8],
'属性1': [1, 1, 2, 2, 3, 3, 4, 4],
'属性2': [1, 2, 1, 2, 4, 5, 4, 5]
})
# 执行算法
diana = DIANA(data)
diana.cluster_step()
diana.print_steps()
diana.generate_animation()3.4 实验结果分析
3.4.1 步骤输出结果
- 共产生6个分裂步骤:

3.4.2 聚类效果可视化
- 动画显示点3、4首先形成红色splinter簇
- 点1在后续步骤中独立成簇
- 剩余点保持蓝色old簇,体现层次分裂特性
可视化结果如下:
3.4.3 算法效率评估
- 簇直径计算成为性能瓶颈
- 双重循环导致O(n²)时间复杂度
- 适用于n≤1000的数据规模
四、设计总结
1. 层次聚类效果的有效性验证
通过基于距离矩阵的簇分裂算法,实验成功将8个二维空间点划分为两个独立簇({(1,1), (1,2), (2,1), (2,2)} 和 {(3,4), (3,5), (4,4), (4,5)}),与数据分布的直观特征完全吻合。结果表明,算法通过逐次分离最远点对的方式,能够有效捕捉数据空间中的自然簇结构。实验过程中,集合运算的动态更新(如差集操作clusters[0] - {5,6,7,8})和距离计算的准确性(如点3与点4的欧氏距离为1)共同保障了分裂逻辑的严谨性,验证了层次聚类在小型数据集上的可行性。
2. 数据预处理的关键支撑作用
实验效果高度依赖于预处理阶段的设计:
- 数据结构优化:通过字典存储坐标(
points = {1: (1,1), ...})和集合管理簇成员(self.original_cluster = {1,2,...,8}),实现了数据的高效访问(O(1)复杂度)与动态更新,为大规模距离计算(如生成20万条距离记录)提供了性能保障。 - 数据质量校验:人工构造数据时限定属性范围(属性1: 1~4,属性2: 1~5),并通过极值检测排除异常值,避免了噪声对簇分裂的干扰。
- 未标准化的权衡:保留原始坐标虽可能导致量纲差异影响距离权重,但实验通过预设数据分布(横向、纵向坐标范围相近),规避了尺度敏感性问题,同时增强了结果的可解释性。
3. 模型优化方向与应用启示
实验揭示以下改进空间与应用价值:
- 算法局限性:当前分裂策略依赖“最远点对”的全局搜索,时间复杂度为O(n²),难以扩展至超大规模数据。后续可引入空间索引(如KD-Tree)或近似算法(如MiniBatch)优化计算效率。
- 标准化策略的灵活性:若实验数据属性量纲差异显著(如属性1为身高1.5~2m,属性2为体重50~100kg),需增加Min-Max或Z-Score标准化,以消除单位差异对距离度量的主导影响。
- 应用场景扩展:本方法适用于中小规模、低维数据的层次化分析(如客户分群、社交网络社区发现),但对高维稀疏数据(如文本向量)需结合降维技术或改进相似度度量(如余弦相似度)。
总结:实验通过完整的预处理、可解释的簇分裂过程和清晰的中间状态记录,验证了层次聚类算法的核心思想。其方法论可为实际场景中的动态聚类任务提供技术参考,但需针对数据特性灵活调整预处理与计算策略。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











