






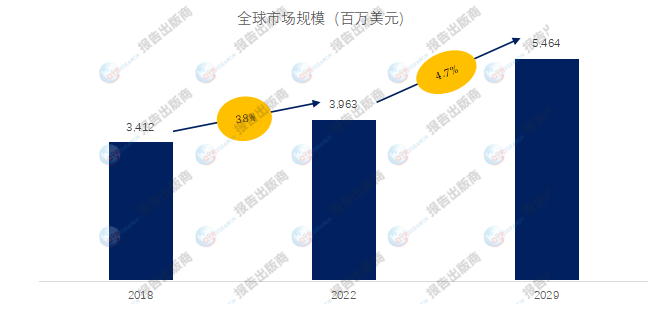
零转割草机全球市场总体规模
据QYResearch调研团队最新报告“全球零转割草机市场报告2024-2030”显示,预计2029年全球零转割草机市场规模将达到54.6亿美元,未来几年年复合增长率CAGR为4.7%。
全球零转割草机市场前19强生产商排名及市场占有率(持续更新)
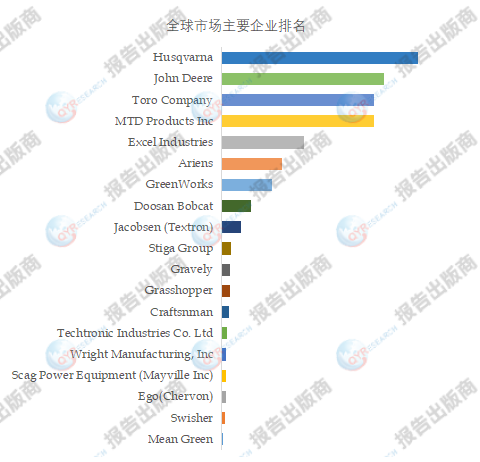
全球范围内零转割草机生产商主要包括Husqvarna、John Deere、MTD Products Inc、Toro Company、Excel Industries、Ariens、GreenWorks、Doosan Bobcat、Jacobsen (Textron)、Stiga Group等。2022年,全球前五大厂商占有大约61.0%的市场份额。















 1500
1500











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









