






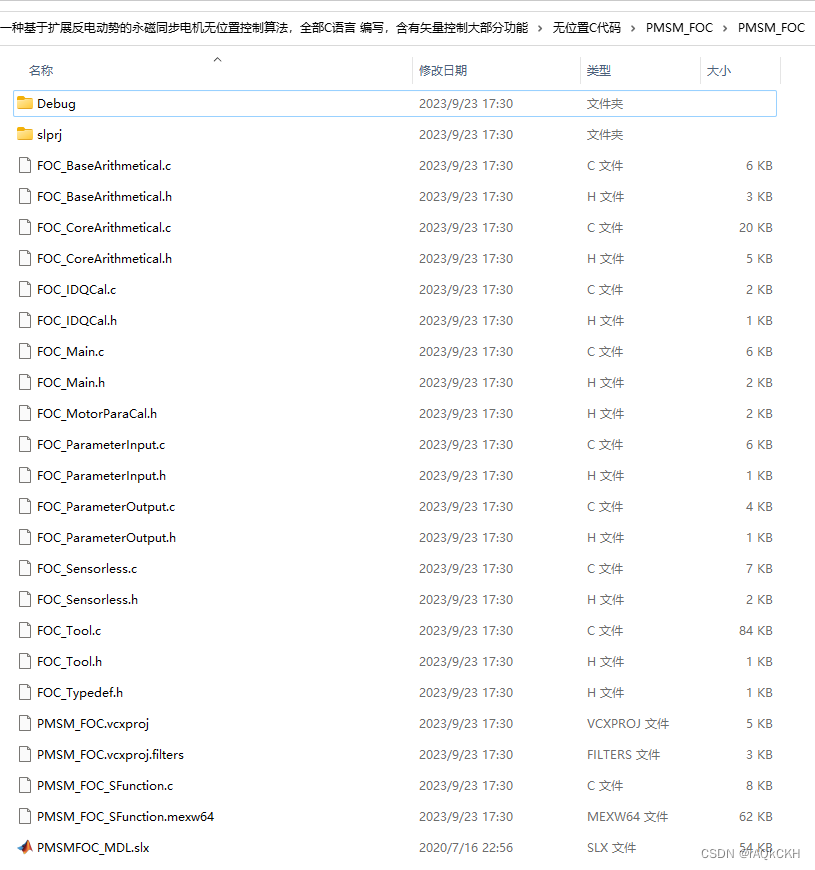
一种基于扩展反电动势的永磁同步电机无位置控制算法,全部C语言 编写,含有矢量控制大部分功能(弱磁,解耦,过调制,死区补偿等)
为了方便学习和工作,该产品结合S-Function进行仿真,且属于量产产品级,已经在多个项目中应用,并赠送多种无位置纯仿真模型(包含滑膜,高频注入,MRAS,龙贝格等)

基于扩展反电动势的永磁同步电机无位置控制算法
摘要: 本文介绍了一种基于扩展反电动势的永磁同步电机无位置控制算法。该算法使用C语言编写,具备矢量控制的多种功能,如弱磁、解耦、过调制和死区补偿等。为了方便学习和工作,该算法结合了S-Function进行仿真,并已应用于多个项目中。此外,还提供了多种无位置纯仿真模型,包含滑膜、高频注入、MRAS和龙贝格等。
-
引言 永磁同步电机在工业和交通领域中得到广泛应用,其高效率和高扭矩密度使其成为理想的电力驱动解决方案。然而,传统的位置控制算法需要使用位置传感器,增加了系统复杂度和成本。为了解决这个问题,本文提出了一种基于扩展反电动势的永磁同步电机无位置控制算法。
-
算法设计 2.1 扩展反电动势 扩展反电动势是一种通过测量电机终端电压和电流来实时估计转子位置的方法。本算法利用扩展反电动势原理,根据电机的数学模型推导出反电动势方程,并通过测量电机的终端电压和电流来实时计算转子位置。
2.2 矢量控制功能 为了提高电机的运行效果,本算法还实现了矢量控制的功能。通过在空间矢量调制中引入弱磁、解耦、过调制和死区补偿等技术,可以有效提高电机的控制性能和稳定性。
- 算法实现 3.1 C语言编写 为了保证算法的高效性和可移植性,本算法使用C语言进行编写。C语言具有良好的性能和灵活性,可以方便地与其他系统进行集成。
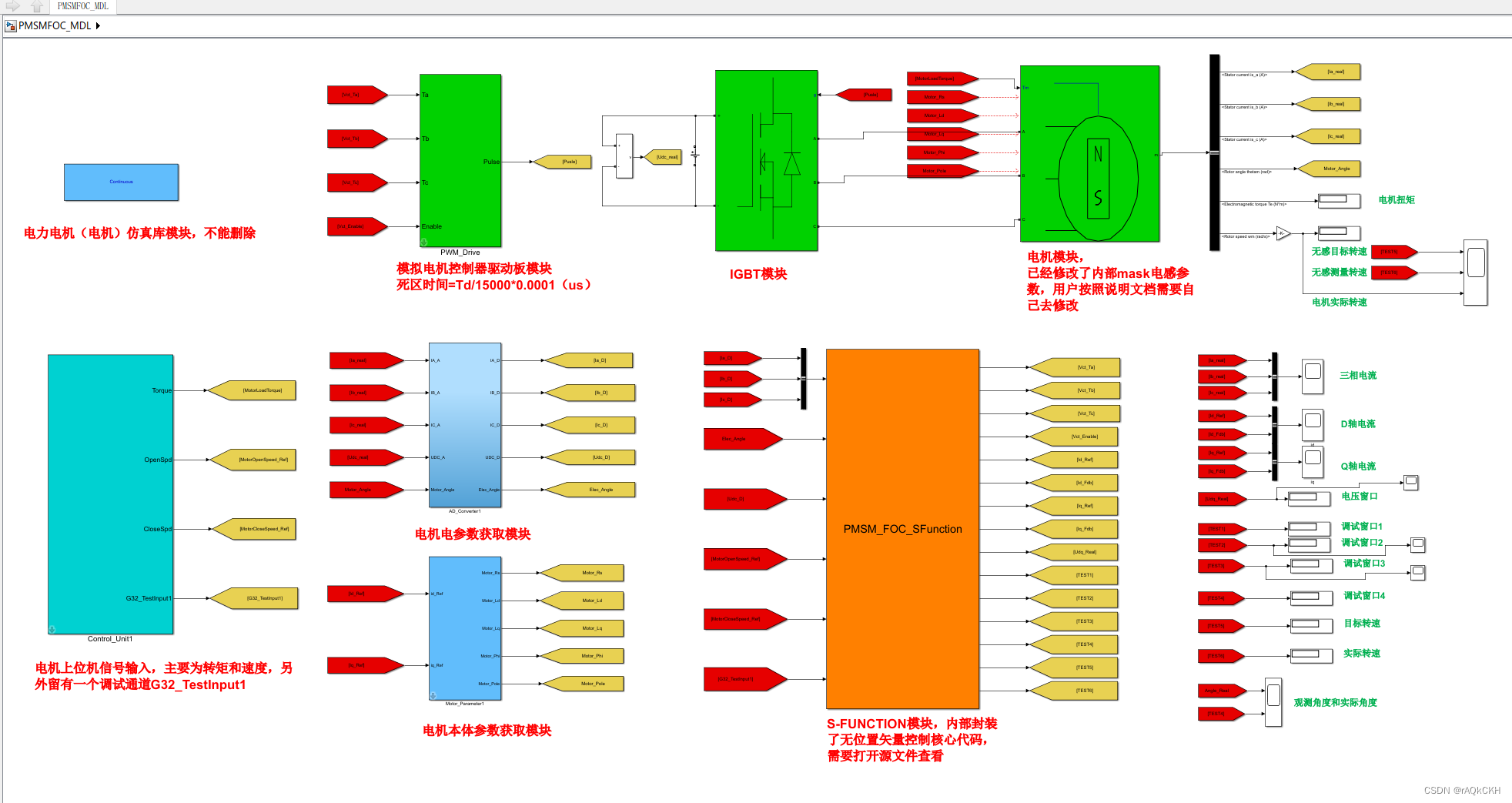
3.2 S-Function仿真 为了方便学习和工作,本算法结合了S-Function进行仿真。S-Function是一种在Simulink环境下使用自定义代码进行仿真的工具。通过使用S-Function,用户可以方便地进行算法验证和性能评估。
-
应用案例 本算法已经在多个项目中成功应用。在电机驱动系统中,它能够实时估计转子位置并控制电机的转速和扭矩。同时,为了方便用户学习和验证算法的性能,还提供了多种无位置纯仿真模型,包含滑膜、高频注入、MRAS和龙贝格等。
-
结论 本文介绍了一种基于扩展反电动势的永磁同步电机无位置控制算法。该算法使用C语言编写,具备矢量控制的多种功能,并结合S-Function进行仿真。该算法已在多个项目中成功应用,并提供了多种无位置纯仿真模型。未来,我们将继续改进算法的性能和稳定性,并进一步推广应用于更多领域。
相关代码,程序地址:http://lanzouw.top/991000009793.html


















 700
700

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









