






MATLAB四旋翼自适应控制仿真simulink simscape,可更换成自己的无人机solidworks模型 有公式手册需MATLAB2017版本以上
YID:7339666940697446
爱小马的海盐大傻



MATLAB四旋翼自适应控制仿真simulink simscape,可更换成自己的无人机solidworks模型 有公式手册需MATLAB2017版本以上
近年来,无人机技术得到了快速发展,且在各个领域得到广泛应用。无人机四旋翼是其中一种常见的多旋翼无人机,其具备良好的悬停能力和机动性能,已被广泛应用于航拍、物流配送等领域。然而,四旋翼无人机的自适应控制设计一直是一个关键挑战,这要求无人机具备对环境变化和干扰的适应能力。
MATLAB是一款功能强大的科学计算软件,其内置的Simulink和Simscape工具箱为四旋翼无人机的自适应控制仿真提供了便利和灵活性。Simulink是MATLAB的可视化建模和仿真环境,可以直观地设计和调试控制算法。Simscape是一种基于物理原理的建模环境,可以帮助工程师更加准确地模拟四旋翼无人机的动态行为。
在进行四旋翼自适应控制仿真之前,我们首先需要准备好相应的模型和仿真环境。在MATLAB中,我们可以使用Solidworks等工具来建立和导入无人机模型。通过模型导入功能,我们能够根据自己的需求对无人机的几何形状和参数进行设定。这为后续的仿真和控制设计奠定了基础。
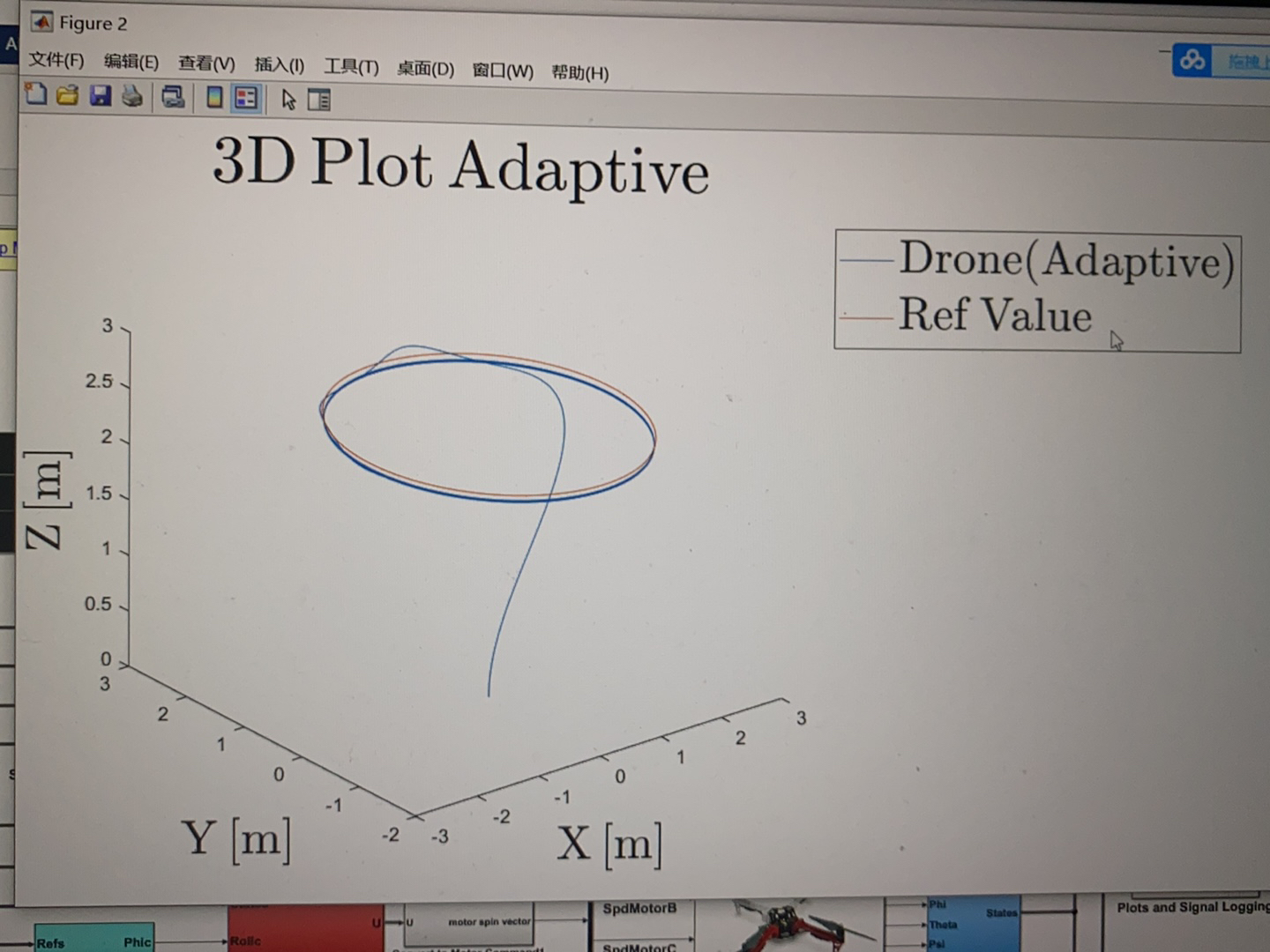
在仿真环境准备好后,我们可以开始进行四旋翼自适应控制算法的设计和仿真。自适应控制是一种能够根据环境变化和干扰进行调整的控制算法。对于四旋翼无人机而言,自适应控制算法可以提高其对风速和负载变化等外部干扰的适应性,提升其飞行性能和稳定性。
在设计自适应控制算法时,我们可以参考MATLAB提供的公式手册。这些手册中包含了丰富的控制理论和算法,可以帮助我们深入理解四旋翼无人机的动力学和控制原理。通过结合仿真环境和公式手册,我们能够针对不同的自适应控制算法进行仿真和评估,从而选择出最佳的控制策略。
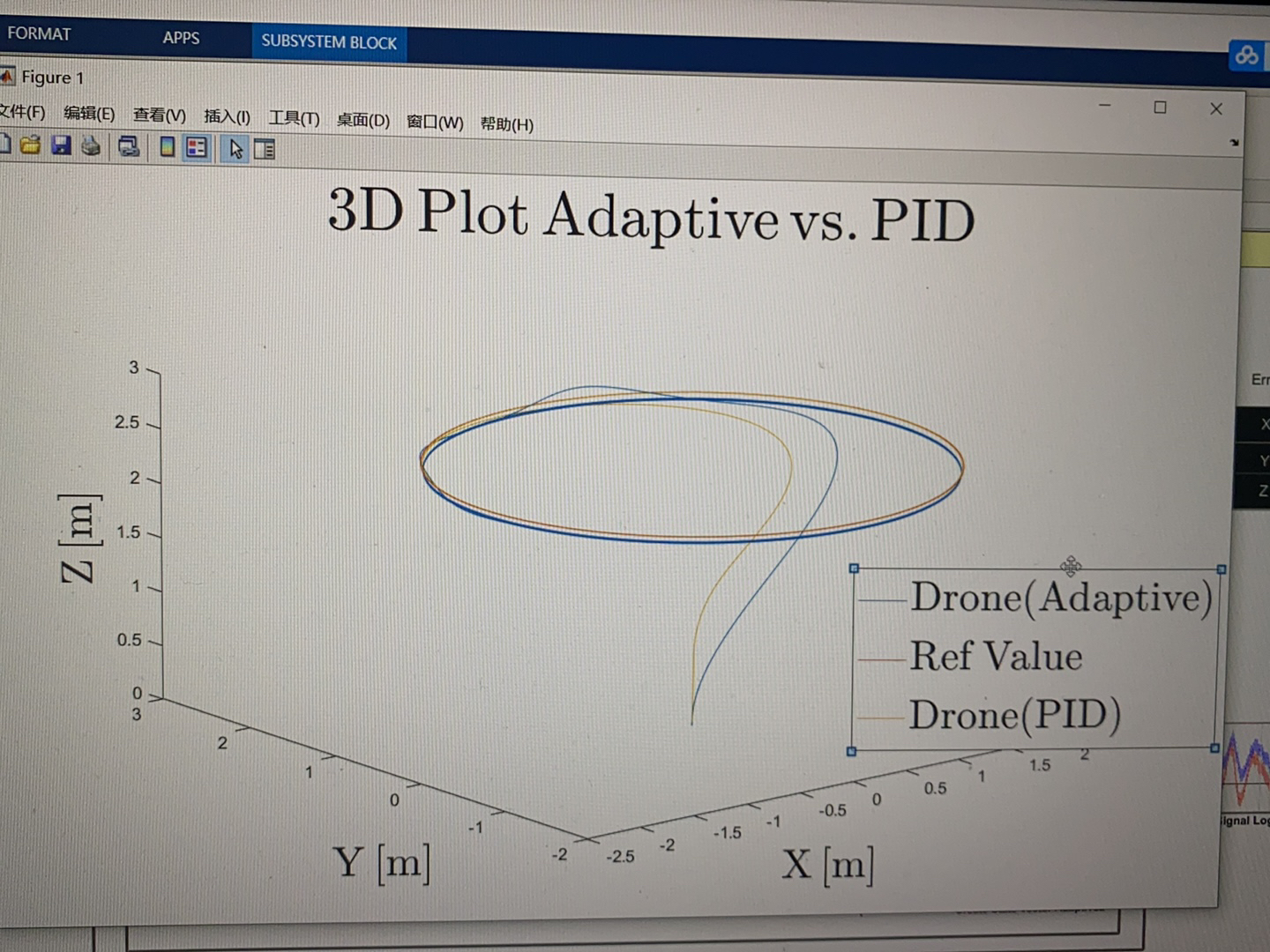
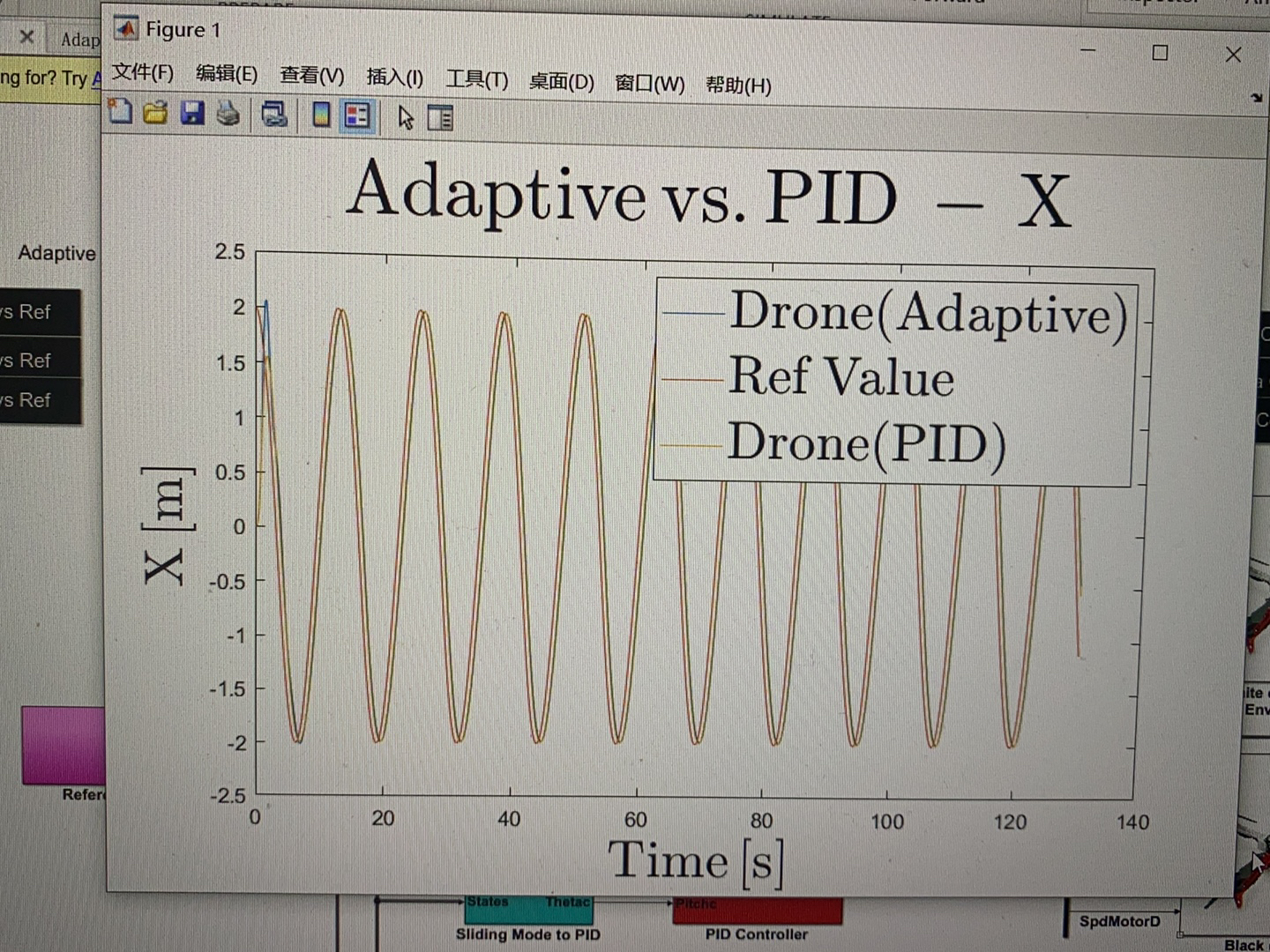
通过Simulink和Simscape的联合使用,我们可以建立起四旋翼自适应控制的仿真模型。Simulink提供了丰富的模块库,包括传感器模块、控制器模块等,可以直观地构建四旋翼无人机的控制系统。Simscape则可以帮助我们建立四旋翼无人机的物理模型,包括动力学模型、气动模型等。这样一来,我们可以在仿真环境下对不同的自适应控制算法进行验证和优化。
在仿真过程中,我们可以根据不同的场景和任务进行仿真设置。例如,我们可以设置风速和风向变化的场景,评估自适应控制算法对风干扰的适应能力。我们还可以设置负载变化的场景,评估自适应控制算法对负载变化的适应性。通过不断地进行仿真和优化,我们能够获得更好的四旋翼无人机自适应控制算法。
总之,MATLAB的Simulink和Simscape工具箱提供了强大的仿真环境和建模工具,可用于四旋翼无人机自适应控制算法的开发和优化。通过合理利用这些工具,我们能够设计出具备高适应性和稳定性的四旋翼无人机控制系统。这将为无人机在各个领域的应用提供更多可能性,并推动无人机技术的进一步发展。
相关的代码,程序地址如下:http://nodep.cn/666940697446.html
















 352
352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









