







RT-Thread
线程间同步
在多线程实时系统中,一项的完成往往可以通过多个线程协调的方式共同来完成,
例如,一项工作中的两个线程:
一个线程从传感器中接收数据并且将数据写到共享内存中,同时另一个线程周期性的从共享内存中读取数据并发送去显示,下图描述了两个线程间的数据传递:
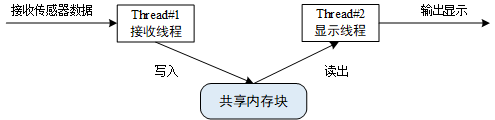
如果对共享内存的访问不是排他性的,那么各个线程间可能同时访问它,这将引起数据一致性的问题。例如,在显示线程试图显示数据之前,接收线程还未完成数据的写入,那么显示将包含不同时间采样的数据,造成显示数据的错乱。
将传感器数据写入到共享内存块的接收线程 #1 和将传感器数据从共享内存块中读出的线程 #2 都会访问同一块内存。为了防止出现数据的差错,两个线程访问的动作必须是互斥进行的,应该是在一个线程对共享内存块操作完成后,才允许另一个线程去操作,这样,接收线程 #1 与显示线程 #2 才能正常配合,使此项工作正确地执行。
同步是指按预定的先后次序进行运行,线程同步是指多个线程通过特定的机制(如互斥量,事件对象,临界区)来控制线程之间的执行顺序,也可以说是在线程之间通过同步建立起执行顺序的关系,如果没有同步,那线程之间将是无序的。
多个线程操作 / 访问同一块区域(代码),这块代码就称为临界区,上述例子中的共享内存块就是临界区。
线程互斥是指对于临界区资源访问的排它性。当多个线程都要使用临界区资源时,任何时刻最多只允许一个线程去使用,其它要使用该资源的线程必须等待,直到占用资源者释放该资源。线程互斥可以看成是一种特殊的线程同步。
线程的同步方式有很多种,其核心思想都是:在访问临界区的时候只允许一个 (或一类) 线程运行。
进入 / 退出临界区的方式有很多种:
1)调用 rt_hw_interrupt_disable() 进入临界区,调用 rt_hw_interrupt_enable() 退出临界区;详见《中断管理》的全局中断开关内容。
2)调用 rt_enter_critical() 进入临界区,调用 rt_exit_critical() 退出临界区。
有多种同步方式:
信号量(semaphore)、互斥量(mutex)、和事件集(event)。
本文章将主要介绍信号量
信号量
以生活中的停车场为例来理解信号量的概念:
①当停车场空的时候,停车场的管理员发现有很多空车位,此时会让外面的车陆续进入停车场获得停车位;
②当停车场的车位满的时候,管理员发现已经没有空车位,将禁止外面的车进入停车场,车辆在外排队等候;
③当停车场内有车离开时,管理员发现有空的车位让出,允许外面的车进入停车场;待空车位填满后,又禁止外部车辆进入。
在此例子中,管理员就相当于信号量,管理员手中空车位的个数就是信号量的值(非负数,动态变化);停车位相当于公共资源(临界区),车辆相当于线程。
车辆通过获得管理员的允许取得停车位,就类似于线程通过获得信号量访问公共资源。
信号量工作机制
信号量是一种轻型的用于解决线程间同步问题的内核对象,线程可以获取或释放它,从而达到同步或互斥的目的。
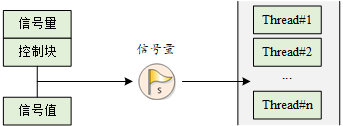
信号量工作示意图如下图所示,每个信号量对象都有一个信号量值和一个线程等待队列,信号量的值对应了信号量对象的实例数目、资源数目,
假如信号量值为 5,则表示共有 5 个信号量实例(资源)可以被使用,当信号量实例数目为零时,再申请该信号量的线程就会被挂起在该信号量的等待队列上,等待可用的信号量实例(资源)。
信号量控制块
在 RT-Thread 中,信号量控制块是操作系统用于管理信号量的一个数据结构,由结构体 struct rt_semaphore 表示。
另外一种 C 表达方式 rt_sem_t,表示的是信号量的句柄,在 C 语言中的实现是指向信号量控制块的指针。
信号量控制块结构的详细定义如下:
struct rt_semaphore
{
struct rt_ipc_object parent; /* 继承自 ipc_object 类 */
rt_uint16_t value; /* 信号量的值 */
};
/* rt_sem_t 是指向 semaphore 结构体的指针类型 */
typedef struct rt_semaphore* rt_sem_t;
rt_semaphore 对象从 rt_ipc_object 中派生,由 IPC 容器所管理,信号量的最大值是 65535。
信号量的管理方式
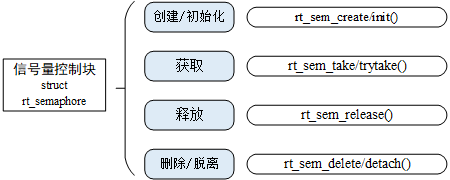
信号量控制块中含有信号量相关的重要参数,在信号量各种状态间起到纽带的作用。信号量相关接口如下图所示,对一个信号量的操作包含:创建 / 初始化信号量、获取信号量、释放信号量、删除 / 脱离信号量。
创建和删除信号量
当创建一个信号量时,内核首先创建一个信号量控制块,然后对该控制块进行基本的初始化工作,
创建信号量使用下面的函数接口:
rt_sem_t rt_sem_create(const char *name,
rt_uint32_t value,
rt_uint8_t flag);
当调用这个函数时,系统将先从对象管理器中分配一个 semaphore 对象,并初始化这个对象,然后初始化父类 IPC 对象以及与 semaphore 相关的部分。
在创建信号量指定的参数中,信号量标志参数决定了当信号量不可用时,多个线程等待的排队方式。
当选择 RT_IPC_FLAG_FIFO(先进先出)方式时,那么等待线程队列将按照先进先出的方式排队,先进入的线程将先获得等待的信号量;
当选择 RT_IPC_FLAG_PRIO(优先级等待)方式时,等待线程队列将按照优先级进行排队,优先级高的等待线程将先获得等待的信号量。
注:RT_IPC_FLAG_FIFO 属于非实时调度方式,除非应用程序非常在意先来后到,并且你清楚地明白所有涉及到该信号量的线程都将会变为非实时线程,方可使用 RT_IPC_FLAG_FIFO,否则建议采用 RT_IPC_FLAG_PRIO,即确保线程的实时性。
下表描述了该函数的输入参数与返回值:
| 参数 | 描述 |
|---|---|
| name | 信号量名称 |
| value | 信号量初始值 |
| flag | 信号量标志,它可以取如下数值: RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO |
| 返回 | —— |
| RT_NULL | 创建失败 |
| 信号量的控制块指针 | 创建成功 |
系统不再使用信号量时,可通过删除信号量以释放系统资源,适用于动态创建的信号量。
删除信号量使用下面的函数接口:
rt_err_t rt_sem_delete(rt_sem_t sem);
调用这个函数时,系统将删除这个信号量。
如果删除该信号量时,有线程正在等待该信号量,那么删除操作会先唤醒等待在该信号量上的线程(等待线程的返回值是 - RT_ERROR),然后再释放信号量的内存资源。
下表描述了该函数的输入参数与返回值:
| 参数 | 描述 |
|---|---|
| sem | rt_sem_create() 创建的信号量对象 |
| 返回 | —— |
| RT_EOK | 删除成功 |
初始化和脱离信号量
对于静态信号量对象,它的内存空间在编译时期就被编译器分配出来,放在读写数据段或未初始化数据段上,此时使用信号量就不再需要使用 rt_sem_create 接口来创建它,而只需在使用前对它进行初始化即可。
初始化信号量对象可使用下面的函数接口:
rt_err_t rt_sem_init(rt_sem_t sem,
const char *name,
rt_uint32_t value,
rt_uint8_t flag)
当调用这个函数时,系统将对这个 semaphore 对象进行初始化,然后初始化 IPC 对象以及与 semaphore 相关的部分。
信号量标志可用上面创建信号量函数里提到的标志。
下表描述了该函数的输入参数与返回值:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1013
1013

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









