







论文笔记:Faster R-CNN:Towards Real-Time Object Detection with Region Proposal Networks
文章: http://arxiv.org/abs/1506.01497
首先,回顾下Fast R-CNN,与传统CNN不同的是,Fast R-CNN将图片送入网络时同时将multiple regions of interest (RoIs) 也送入网络,每一个RoI被pooled到一个固定大小的feature map,然后通过全连接将其映射到一个特征向量。每个RoI最终得到两个输出向量softmax probabilities 和 per-class bounding-box regression offsets。
Faster R-CNN 可以看做是对 Fast R-CNN 的进一步加速,最主要解决的如何快速获得 proposal,一般的做法都是利用显著性目标检测(如Selective search)过一遍待检测图,得到proposal。基于区域的深度卷积网络虽然使用了 GPU 进行加速,但是the region proposal methods 确却都是在 CPU上实现的,这就大大地拖慢了整个系统的速度。然后作者提出,卷积后的特征图同样也是可以用来生成 region proposals 的。通过增加两个卷积层来实现 Region Proposal Networks (RPNs) , 一个用来将每个特征图 的位置编码成一个向量,另一个则是对每一个位置输出一个 objectness score 和 regressed bounds for k region proposals。
RPNs 是一种 fully-convolutional network (FCN),为了与 Fast R-CNN 相结合,作者给出了一种简单的训练方法:固定 proposal, 为生成 proposal 和 目标检测 这两个task 交替微调网络 。
Region Proposal Networks
RPNs 从任意尺寸的图片中得到一系列的带有 objectness score 的 object proposals。具体流程是:使用一个小的网络在最后卷积得到的特征图上进行滑动扫描,这个滑动的网络每次与特征图上n*n 的窗口全连接,然后映射到一个低维向量,例如256D或512D, 最后将这个低维向量送入到两个全连接层,即box回归层(box-regression layer (reg))和box分类层(box-regression layer (reg))。
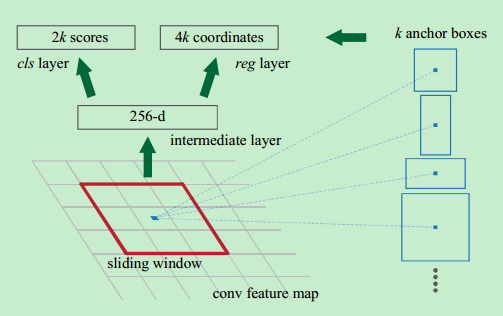
Translation-Invariant Anchors
这里作者说的平移不变性,其实就是以窗口中心进行多个尺度、宽高比的采样。如上图右边,文中使用了3 scales and 3 aspect ratios (1:1,1:2,2:1), 就产生了 k = 9 anchors at each sliding position. Anchors 这个词不知道应该怎么翻译,原文写的是:The k proposals are parameterized relative to k reference boxes, called anchors。
A Loss Function for Learning Region Proposals
作者将 anchors 分为两类:与 ground-truth box 有较高的 IoU 或 与任意一个 ground-truth box 的 IoU 大于0.7 的 anchor 都标为 positive label; 与 所有 ground-truth box 的IoU 都小于0.3的 anchor 都标为 negative label。其余非正非负的都被丢掉。
对于每一个 anchor box i, 其 loss function 定义为:
L(pi,ti)=Lcls(pi,p?i)+λp?iLreg(ti,t?i)
其中,
pi
是预测其是一个 object 的 probability ,当其label 为 positive 时,
p?i
为1,否则为0。
ti={tx,ty,tw,th}
是预测的 bounding box,
t?i
是与这个 anchor 相对应的 ground-truth box 。 classification loss
Lcls
是一个二分类(是或者不是object)的 softmax loss 。regression loss
Lreg(ti,t?i)=R(ti?t?i)
,
R
是 Fast R-CNN 中定义的 robust loss function (smooth-L1) ,
p?iLreg
表示只针对 positive anchors (
p?i
= 1). 这里还有一个平衡因子
λ
, 文中设为10,表示更倾向于box location。
Optimization
使用 back-propagation and stochastic gradient descent (SGD) 对这个RPN进行训练,每张图片随机采样了256个 anchors , 这里作者认为如果使用所有的anchors来训练的话,this will bias towards negative samples as they are dominate。所以这里作者将采样的正负positive and negative anchors have a ratio of 1:1.
新增的两层使用高斯来初始化,其余使用 ImageNet 的 model 初始化。详见论文。
Sharing Convolutional Features for Region Proposal and Object Detection**
通过交替优化来学习共享的特征,主要有4步:
- 1. 使用前面的方法训练一个RPN。用 ImageNet 的 model 初始化,然后针对 region proposal task 进行微调。
- 2. 利用第一步得到的 proposals 使用 Fast R-CNN 来训练另一一个单独的 detection network, 到这里两个网络还是分开的,没有 share conv layers 。
- 3. 利用第二部训练好的 detection network 来初始化 RPN , 然后训练,这里训练的时候固定 conv layers ,只微调 RPN 那一部分的网络层。
- 4. 再固定 conv layers ,只微调 Fast R-CNN 的 fc 层。
Implementation Details
每个 anchor , 使用 3 scales with box areas of 1282 , 2562 , and 5122 pixels, and 3 aspect ratios of 1:1, 1:2, and 2:1. 忽略了所有的 cross-boundary anchors 。在 proposal regions 上根据 cls scores 进行了 nonmaximum suppression (NMS) 。其余详见论文。
Experiments
详见论文。
Conclusion
主要是提出了使用 Region Proposal Networks (RPNs) 来生成 region proposals ,然后使用共享权值减少了网络参数, 使得region proposal step is nearly cost-free.
论文笔记:Faster R-CNN:Towards Real-Time Object Detection with Region Proposal Networks















 1873
1873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









