







Bilateral filter即双边滤波器,是一种非线性、保边、去噪的滤波器,由两个函数组成。前者为高斯分布,后者由像素差值决定系数,像素差值可以为亮度空间或者深度距离等。
双边滤波器中,输出像素的值取决于邻域内所有像素值的加权和:
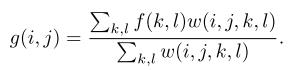
权重系数取决于定义域核

和值域核

的乘积

从上式可以看出,当邻域内某像素值与当前像素值差过大时,其权重几乎为零,则该邻域内像素值对当前像素的输出值无贡献,这样,只有与当前像素值接近的像素会对当前像素的输出值有贡献,就保留了边缘。下图是带噪音的灰度有阶跃变化的输入(noisy step edge input)进行双边滤波的效果。
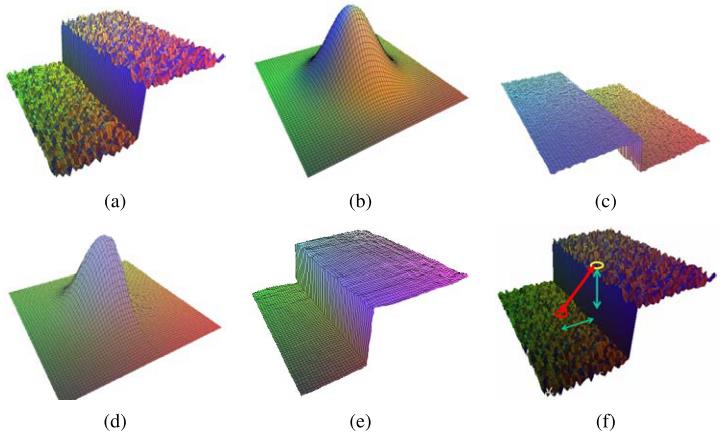
图(a)为noisy step edge input,图(b)为定义域滤波器,图(c)为值域滤波器,图(d)为双边滤波器,图(e)为滤波后的效果,图(f)为像素间的3D距离。
参考资料:
1.维基百科
2.Richard Szeliski, "Computer Vision: Algorithms and Applications"















 8628
8628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









