



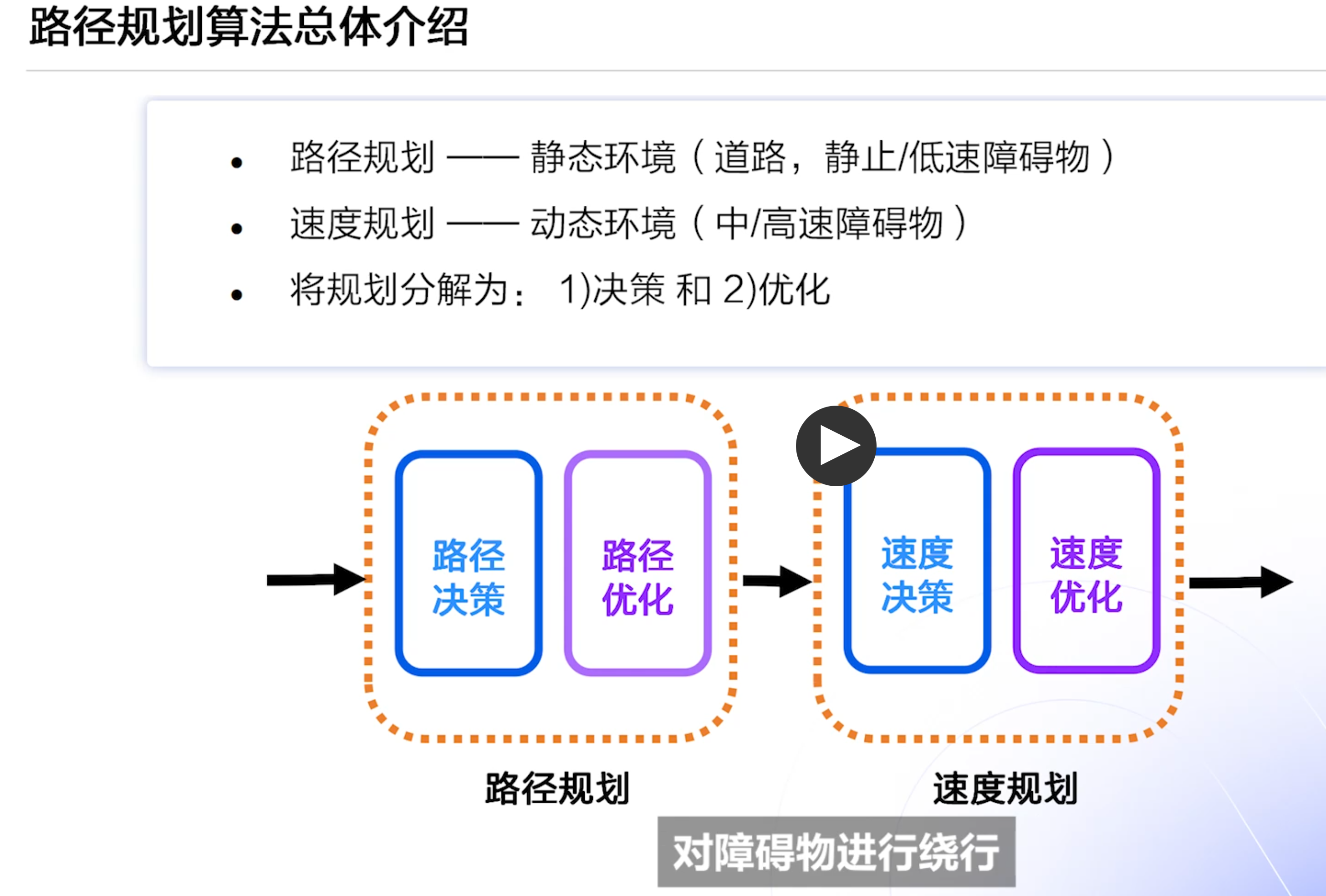
路径规划分为路径和速度规划,对应静态和动态环境
路径规划分为:确定路径边界,优化路径,评估路径是否有效(同时选择最优化路径)这三步骤
lane_follow,lane_follow,lane_change,这是几种任务
还有二次规划的路径规划算法,但听不懂,全是数学问题,这个人将的
大概就是路径规划要满足一堆限制条件,然后最后带入osqp求解器
实验主要是关于调整路径规划权重
观察其变化
调整借道绕行的参数
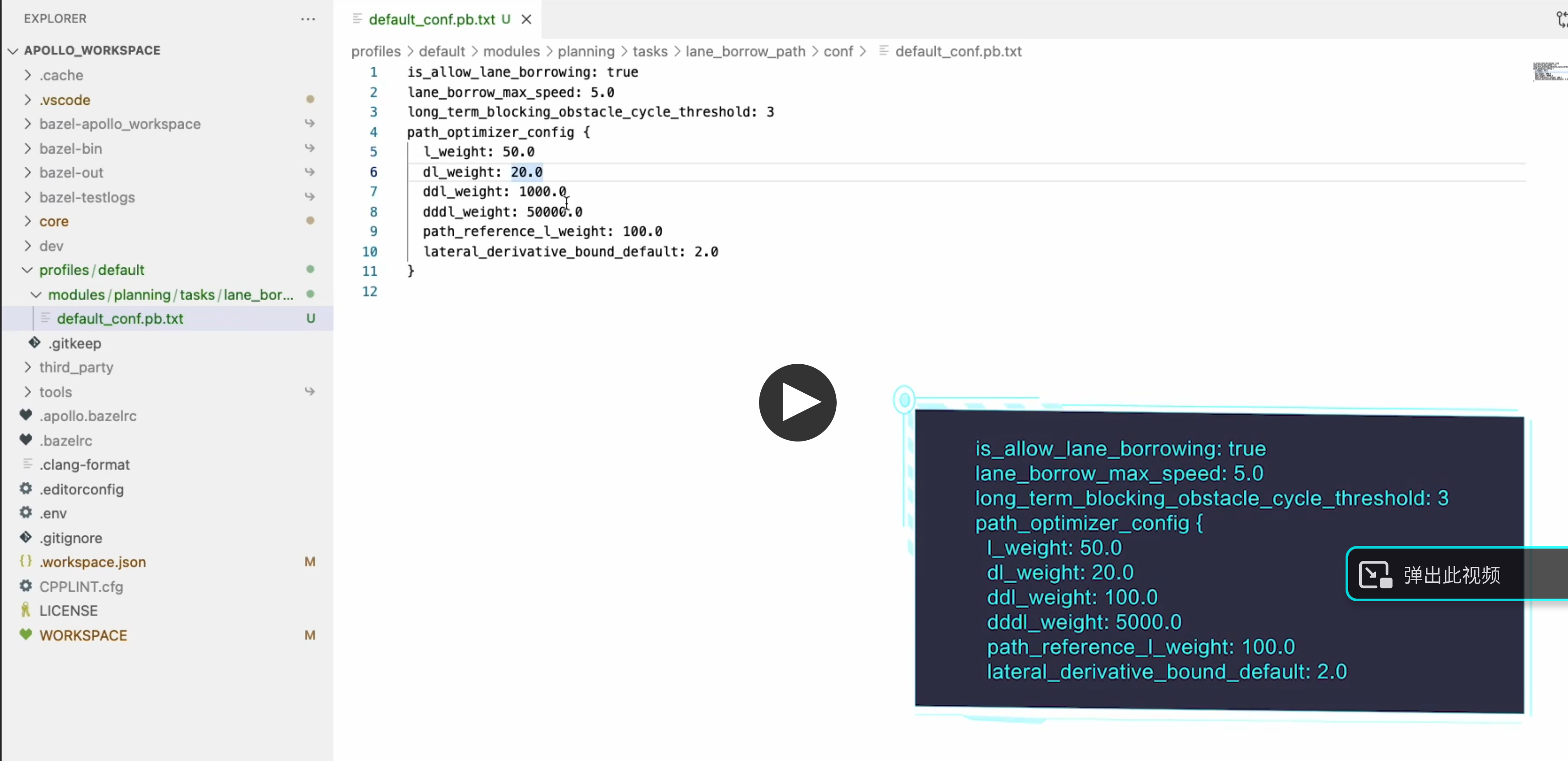
此时路径更加贴近道路中心线规划。
猜测与赛题4相关,
路径规划分为路径和速度规划,对应静态和动态环境
路径规划分为:确定路径边界,优化路径,评估路径是否有效(同时选择最优化路径)这三步骤
lane_follow,lane_follow,lane_change,这是几种任务
还有二次规划的路径规划算法,但听不懂,全是数学问题,这个人将的
大概就是路径规划要满足一堆限制条件,然后最后带入osqp求解器
实验主要是关于调整路径规划权重
观察其变化
调整借道绕行的参数
此时路径更加贴近道路中心线规划。
猜测与赛题4相关,

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























