






referenceline 参考线数据结构
priority为优先级,用于评估多条参考线优先级
speed_limit为分段限速
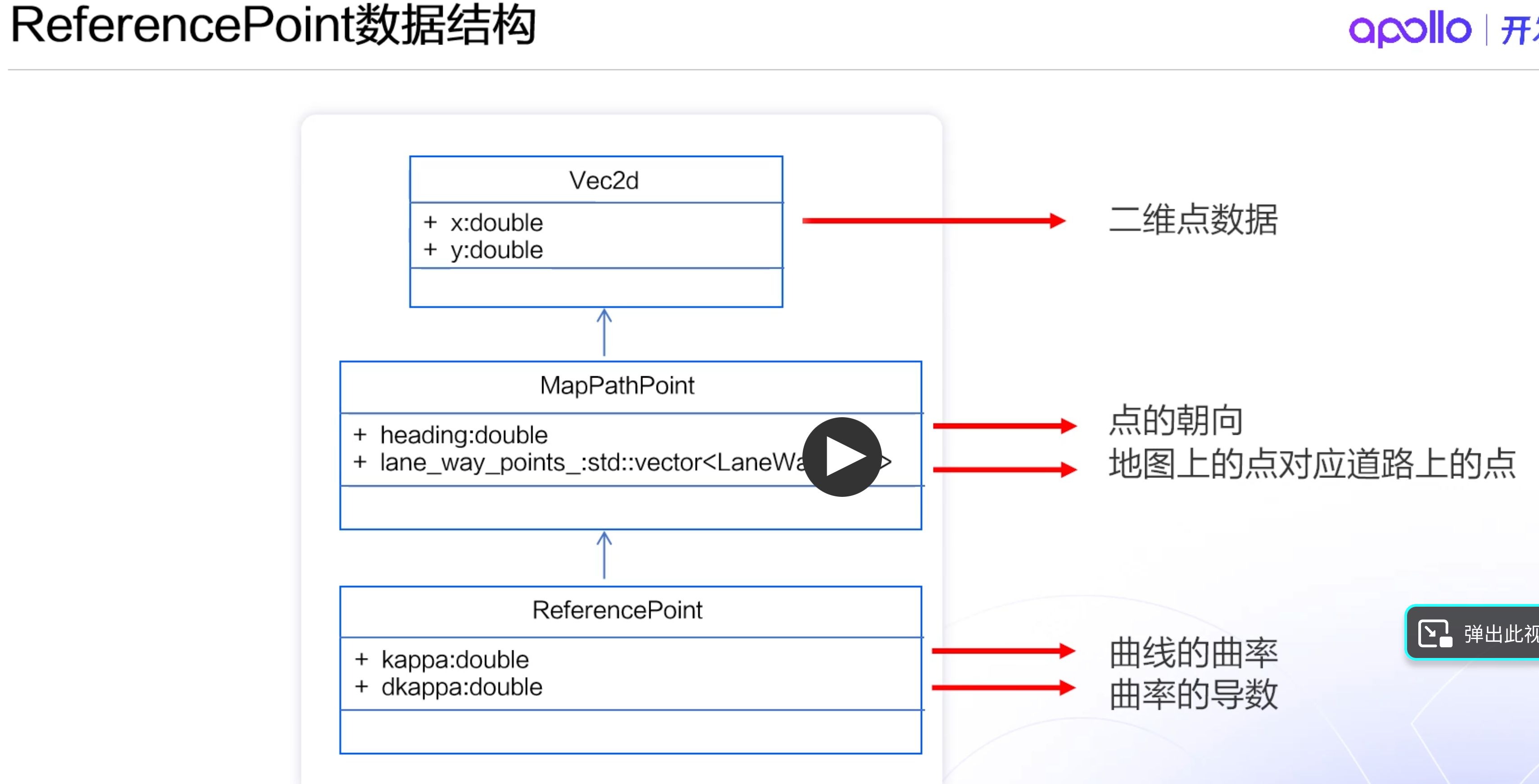
reference_points_是一个数组,是由多个参考点组成的,也是参考线的本质。
map_path_是地图中的参考线,就是参考线在地图中的体现。
其继承关系见下图:
参考线提供线程
分为两部分:参考线生成和平滑
平滑也有几种方法:离散点,螺旋线,样条曲线
默认为离散点平滑,具体算法见视频。通过偏移原始点得到
reference_line_max_forward_heading_diff
这个参数在planning.conf中,
从派/2修改为2.5,使得参考线加载长度更长
还可以修改横向和纵向裕度。
可以改变曲率和曲率变化率。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









