






分为速度决策和速度优化两部分
处理动态环境
st图就是速度规划的坐标系
粗规划考虑内容如下:
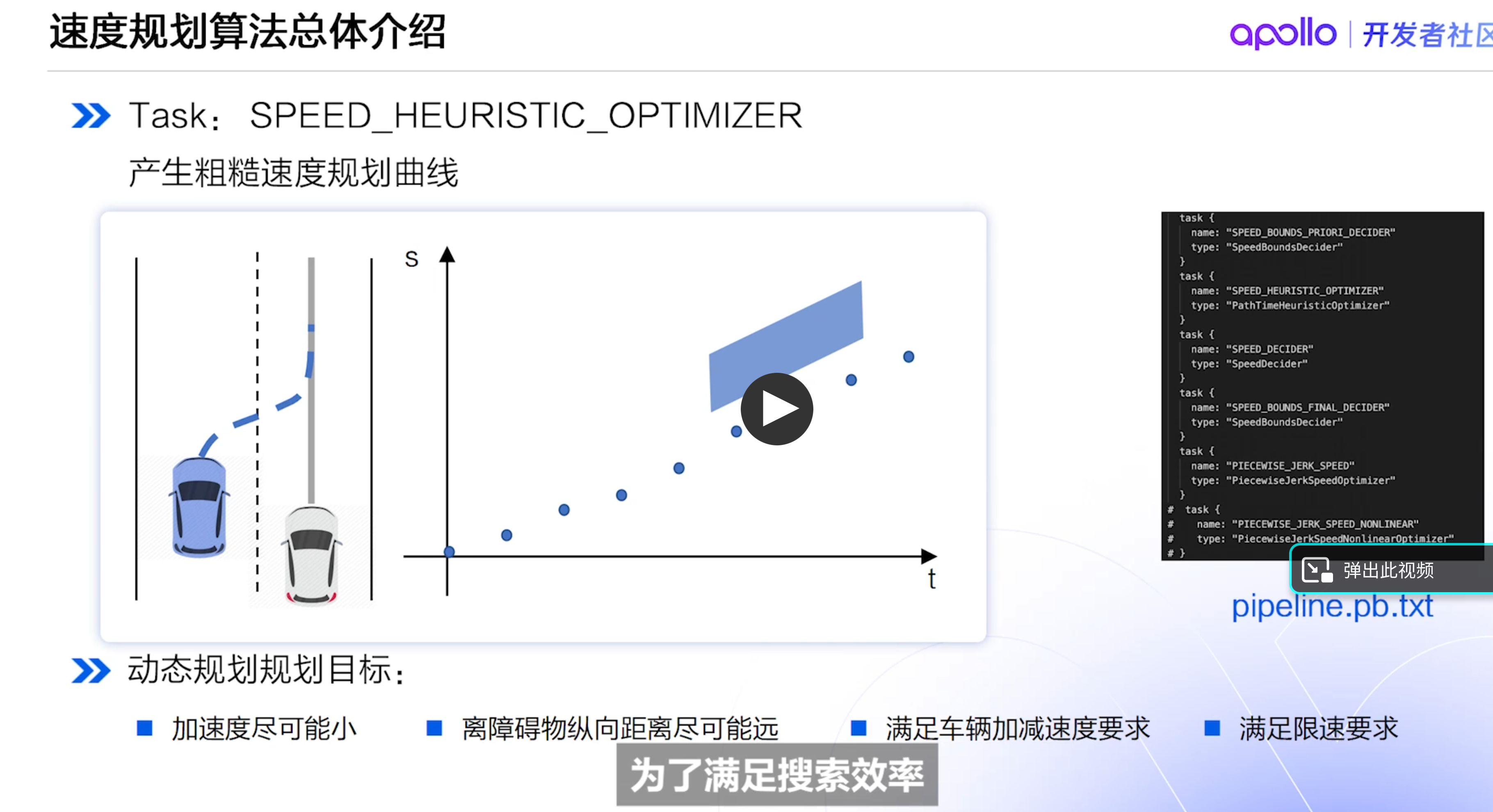
动态规划就是把原问题分解为相对简单的子问题,再根据子问题的解来求解原问题的解。
先进行动态规划,此时得到的还比较粗糙,点比较少。
再进行优化
分为速度决策和速度优化两部分
处理动态环境
st图就是速度规划的坐标系
粗规划考虑内容如下:
动态规划就是把原问题分解为相对简单的子问题,再根据子问题的解来求解原问题的解。
先进行动态规划,此时得到的还比较粗糙,点比较少。
再进行优化

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























