



空间机器人学综述:通过空间探索实现顶尖科学
机器人与自主系统在空间探索中发挥了关键作用,推动了科学突破,并满足了人类征服新世界的好奇心与抱负。本文概述了作为一个快速发展的领域的空间机器人技术,涵盖其基本概念、定义、历史背景和发展历程。我们进一步提出了该领域未来几十年的技术路线图,考虑了国际空间界所认可的主要挑战和优先事项。空间机器人技术是实现广泛的未来机器人及载人航天任务的关键支撑,同时也为向众多地球领域进行知识和技术转移提供了机遇。在更广泛的人道主义背景下,空间机器人技术激励着当代和未来世代投身于科学、技术、工程和数学的探索与深入研究。
对引太言阳系及宇宙最遥远区域的遥远星系进行空间探索,对于顶尖科学以及回答诸多基础科学问题至关重要,这些问题包括宇宙的形成、地球起源、生命演化以及地球以外生命的存有。空间机器人技术在当前和未来的空间探索任务中发挥着关键作用,能够实现特定任务所需的机器,这些机器可在空间环境中生存,并执行探索、装配、建造、维护或服务等任务。现代空间机器人技术是一个多学科交叉的新兴领域,它依托并促进航天工程、地面机器人、计算机科学以及材料与机构等相关专业的发展。
机器人技术通过在太空严酷环境中突破人类限制提供支持,并增强宇航员能力,从而提升人类探索与操作能力。自主系统能够在需要及时处理大量信息的情况下减轻人类的认知负荷,对于提升人员与系统安全至关重要。机器人技术还能实现多个资产的部署与运行,而无需同比例大幅增加地面支持。鉴于其在降低载人与机器人航天任务的成本和风险方面的潜力,空间机器人与自主系统被认为在所有任务阶段(如研制、飞行系统制造、发射和运行)均具有重要意义。
空间机器人技术涵盖用于探索行星表面以及绕天体轨道运行的各种机器人,还包括平台进行导航或控制所需的传感器。轨道机器人可用于卫星维修、组装大型空间望远镜、捕获并返回小行星、部署科学探测设备等任务。行星机器人在地外表面的勘测、观测、采样与近距离检查(包括自然现象、地形构成和资源)中发挥关键作用;同时可用于建设行星表面基础设施,为后续人类抵达做准备;开采行星资源等。
通常认为,一艘航天器要被归类为空间机器人,必须具备两个关键属性,即移动和自主性。根据其应用(轨道或行星),空间机器人被设计为具备移动(或机动性),以进行操作、抓取、漫游、钻探和/或采样。同样受任务性质和与地球距离的影响,机器人需要具备不同程度的自主性,从由人类进行遥操作到机器人自身实现完全自主操作。根据自主水平的不同,空间机器人可以充当以下角色:(i)在太空中作为代理(或人类代理),通过遥操作至半自主操作执行各种任务;(ii)作为助手,能够借助半自主到完全自主操作,帮助人类宇航员更快、更安全地完成任务,并提高质量和成本效益;或(iii)作为探索者,能够利用完全自主操作探索太空中的未知区域。
本文综述了过去、当前以及计划中的机器人航天器任务,并介绍了一些针对未来任务概念的研制工作。由于该领域内容广泛且深入,我们承认这不可能是一份全面的技术综述;本文旨在让读者了解这一多样化且快速发展的领域的整体概况。我们参考了吉田(Yoshida)于2009年以及Flores‐Abad等人(et al.)于2014年发表的关于在轨机器人服务的前期综述文献。此外,对于空间机器人技术更详细的技术性论述,建议读者参考文献。
空间的机器人历史与演变
使用机器人的过去和当前空间探索
自20世纪50年代以来,外层空间为人类提供了真正的新探索前沿。在具备了超越地球的能力以及不可抗拒的吸引力的同时,最大限度地减少人类对其他地外天体(无论是行星、月球、彗星还是小行星)的影响至关重要。20世纪50年代末至60年代初,随着苏联与美国之间太空竞赛的展开,空间探索的重点集中在将人类送入地球轨道以及登上月球。与此同时,在昂贵的载人航天计划研制过程中,使用成本较低的机器人代理对于了解宇航员将要工作的空间环境以及进一步探索太阳系起到了关键作用。在现有的机器人任务中,各种机动性或移动系统发挥了重要作用,包括表面巡视器、机械臂或操作器、次表层采样器以及钻探设备。
例如,首个在地外天体上成功运行的真正机器人移动系统是一个铲斗(即,一种操作累积采样装置)搭载于1967年发射至月球的勘测者3号着陆器上。随后,月球16号于1970年成功使用了首个行星用机械臂安装钻机,而月球17号于1970年成功部署了名为月球车1号的首台行星漫游车。这些“首次”成就得益于超级大国之间在太空竞赛中持续不断的发射尝试,从而带来了令人瞩目的任务成功和科学发现。
表1. 截至2016年在地球轨道、月球、火星和小天体上成功飞行的机器人。
| 发射年份 | 任务名称 | 国家 | 目标 | 漫游车 | Arm采样器 | 钻机 |
|---|---|---|---|---|---|---|
| 1967 | Surveyor 3 | 美国 | Moon | x | ||
| 1970/1972/1976 | 月球16/20/24号 | 苏联 | Moon | x | x | x |
| 1970/1973 | 月球17/21号 | 苏联 | Moon | x | ||
| 1975 | 维京号 | 美国 | Mars | x | x | |
| 1981/2001/2008 | 加拿大臂1/2/灵巧机械手 | 加拿大 | ISS | x | ||
| 1993 | Rotex | 德国 | 地球轨道 | x | ||
| 1996 | MPF | 美国 | Mars | x | ||
| 1997 | ETS‐ VII | 日本 | 地球轨道 | x | ||
| 2003 | 隼鸟号 | 日本 | 小行星 | x | ||
| 2003 | MERs | 美国 | Mars | x | x | x |
| 2004 | 韩国国际空间站实验 | 德国 | ISS | x | ||
| 2007 | 轨道快车 | 美国 | 地球轨道 | x | ||
| 2008 | 日本实验舱机械手系统 | 日本 | ISS | x | ||
| 2008 | 凤凰号 | 美国 | Mars | x | x | |
| 2012 | 机器人宇航员 | 美国 | ISS | x | ||
| 2011 | MSL | 美国 | Mars | x | x | x |
| 2013 | 嫦娥三号 | 中国 | Moon | x | ||
| 2004年(于2014年到达) | 罗塞塔 | 欧洲 | 彗星 | x | x | x |
| 2016 | 遨龙一号 | 中国 | 地球轨道 | x |
表2. 美国国家航空航天局火星机器人任务科学能力的增长,以每一代火星车为例。
| 火星车 | 质量(千克) | 寿命(火星日) | 行驶距离(公里)(截至4月2017年) | 最大行驶速度(厘米/秒) | 科学载荷质量(千克) | 科学结果报告 |
|---|---|---|---|---|---|---|
| MPF的旅居者号 | 10 | 83 | 0.1 | 0.6 | <1 | (9) |
| MER的机遇号 | 185 | 4500* | >44 | 1 | 6 | (10–12) |
| MSL的好奇号 | 899 | 1667* | >15.98 | 5 | 75 | (13) |
*截至2017年仍在运行。
美国国家航空航天局(NASA)通过一系列成功的行星漫游车任务,如火星探路者(MPF)、火星探测漫游者(MERs)和火星科学实验室(MSL),始终处于火星科学探索的前沿,如表2所示。NASA火星车搭载的仪器设备随着时间推移显著增加。以MPF任务中的旅居者号火星车为例,它是一个相对较小且具有有限寿命的移动机器人,但其在地质学方面的重要发现(即火星上曾存在水的可能性、火星尘埃的磁性以及当前火星气候)彻底改变了我们对火星的认识。两辆相同的火星探测漫游车体积更大,因此能够携带能力更强的科学载荷,包括增强型遥感设备,以及配备用于近距离/表面测量仪器的更先进的机械臂,包括岩石研磨工具、显微成像仪、阿尔法质子X射线光谱仪和穆斯堡尔光谱仪。这些火星车还具备更先进的机动性和导航能力,使得机遇号火星车截至2017年在超过4700个火星日(即火星日)内行驶了超过44公里。火星探测漫游者火星车在地质学、大气科学等领域取得了更加显著的科学进展。火星科学实验室好奇号火星车是三次火星车任务中规模最大的,借助下一代仪器,能够更全面地研究地质、大气、环境条件以及潜在的生物信号。从机器人技术角度来看,好奇号配备了多种利用机械臂进行近距离测量的仪器,包括火星手持透镜成像仪、阿尔法粒子X射线光谱仪以及样品采集分析。
另一个著名的项目是日本的隼鸟号机器人任务,该任务于2005年对近地小行星系川进行了研究和采样并于2010年将这些样本返回地球。隼鸟号任务受到了广泛关注,《科学》杂志曾出版关于系川以及返回样本研究成果的特刊。作为另一个参考数据点,欧洲航天局(ESA)的罗塞塔任务曾对彗核进行受控着陆做出了极为大胆的尝试。名为菲莱的罗塞塔着陆器(图1)配备了多种遥感和原位仪器,用于成分/气体分析(例如,彗星采样与成分分析和托勒密)、钻探与样品回收(即SD2)以及表面测量(即表面电性探测与声学监测实验)。遗憾的是,着陆器发生了弹跳,随后倾斜的停靠位置导致机械臂、采样器和钻机无法使用,限制了菲莱的测量能力及其工作寿命。尽管面临这些挑战,菲莱仍实现了多项科学成果,包括在67P/楚留莫夫‐格拉西缅科彗核上发现了有机分子。

未来太空机器人任务
中期规划任务
一份由各个国际航天机构在中期规划的即将开展的机器人任务列表(表3)清楚地表明,历史上仅有少数国家/组织涉足的领域,如今发射频率显著提高,参与方也更加多样化。中国和印度等太空国家正积极推动机器人任务,首先将月球作为试验平台。美国国家航空航天局和欧洲航天局则专注于火星和小型天体,并且正在推进空间机器人技术以执行采样返回任务。
表3. 正在规划中的中期空间机器人任务
| 发射年份 | 任务 | 国家 | 目标 | 漫游车 | Arm | 采样器 | 钻机 |
|---|---|---|---|---|---|---|---|
| 2017 | 嫦娥五号 | 中国 | Moon | x | x | x | x |
| 2018 | 月船2号 | 印度 | Moon | x | |||
| 2018年(到达) | OSIRIS‐REx样本返回 | 美国 | NEA | x | x | ||
| 2018 | 洞察号 | 美国 | Mars | x | x | x | |
| 2018 | 嫦娥四号 | 中国 | 月球(背面) | x | |||
| 2019 | SLIM | 日本 | Moon | x | x | x | x |
| 2020 | 火星2020 | 美国 | Mars | ||||
| 2020 | 外火星2020 | 欧洲 | Mars | x | x | x | |
| 2020+ | 中国太空站 | 中国 | 地球轨道 | x | |||
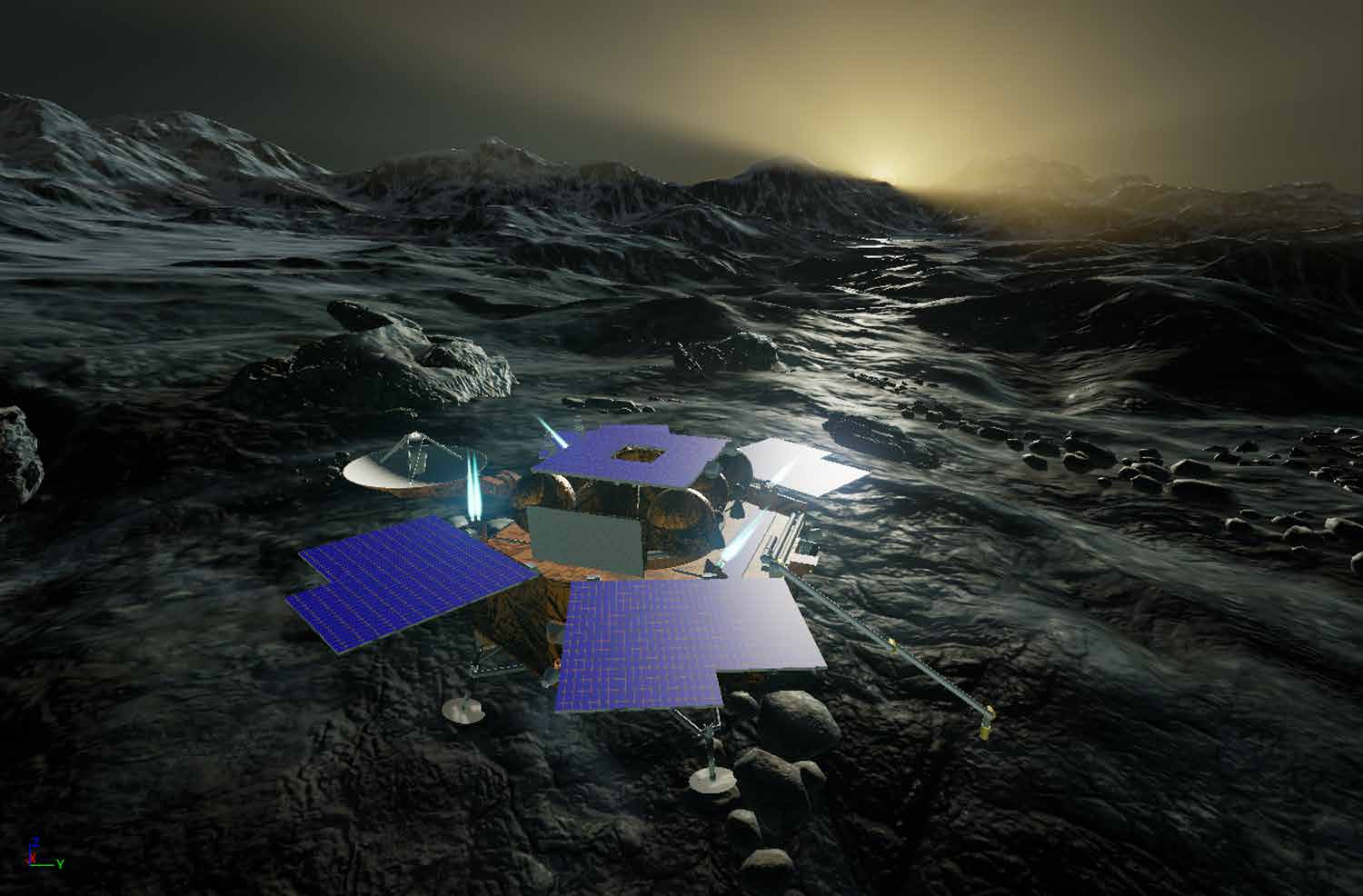
| 2025 | 火卫一采样返回 | 欧洲和俄罗斯 | 火卫一 | x | x |
轨道机器人任务
设想在2025到2035年期间的许多在轨应用都需要先进的机器人技术能力。任务操作方可能包括航天机构、国家政府以及企业。预计的任务重点包括:空间碎片清除、救援、计划轨道提升、检查与部署支持、部署与组装辅助、维修、加油与轨道维护、任务演化与适应、寿命延长,以及再入轨与离轨。国际空间站(ISS)继续为在太空开展科学实验提供了绝佳机会,能够在该环境独特的特性、限制和压力条件下进行研究。中国也在积极发展自己的空间站计划,将在未来十年内逐步建成,为机器人解决方案提供新的太空平台。这些轨道机器人任务可以直接或间接支持从地球轨道开展的科学探索。
行星机器人任务
新规划的行星任务通常旨在实现更具吸引力和雄心的科学目标,这些目标建立在以往任务成果的基础之上前往月球、火星和小天体的任务。特别是美国国家航空航天局(NASA)和欧洲航天局(ESA)在中期规划的任务,将展示比以往任务更先进的科学成果和机器人技术。
美国国家航空航天局的欧西里斯-雷克斯任务OSIRIS‐REx(图2)于2016年发射,将于2018年抵达近地碳质小行星101955贝努。它将对该目标进行为期500天的测绘,随后靠近并采集少量样本(<2 kg),并于2023年返回地球。其“接触即走”采样获取机制(TAGAM)使用安装在机械臂末端的采样头。当采样头检测到接触时,会利用氮气系统采集样本。在尝试采样时,TAGAM最多可使用三次。当航天器于2023年返回地球时,将使用带有再入热盾和降落伞的样本返回舱(源自星尘号技术遗产)将样本送回地面。
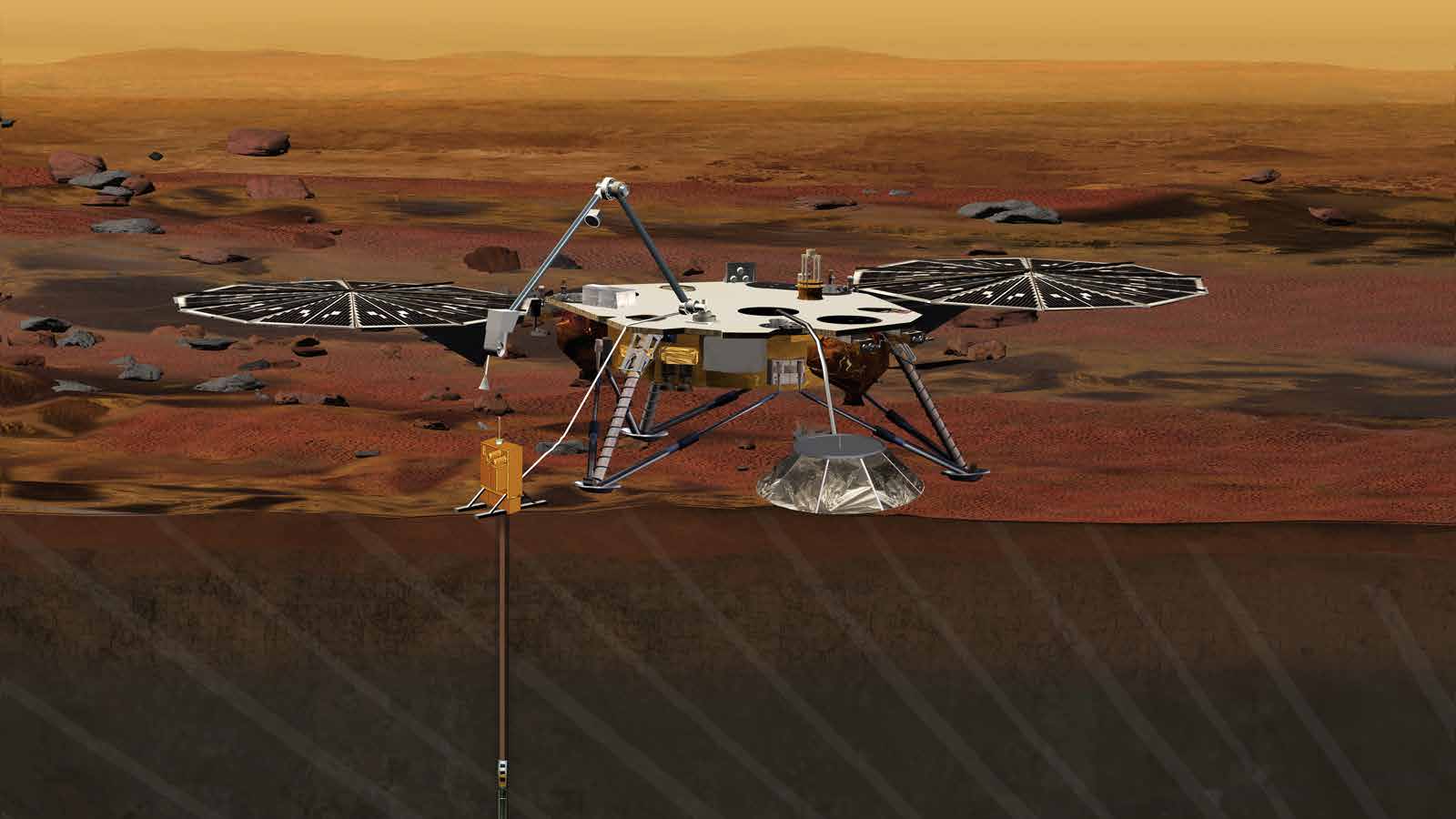
美国国家航空航天局的洞察号任务。洞察号(图3)是一艘火星着陆器,计划于2018年发射并在火星表面着陆。InSight任务采用了此前凤凰号着陆器任务的许多相同概念,但使用了不同的仪器来研究火星内部。其仪器部署机械臂和仪器部署相机将放置两种仪器:(i)由法国国家航天局(Centre national d’études spatiales)主导的“内部结构地震实验仪”,这是一种用于研究火星内部和地震活动的地震学仪器;(ii)由德国航空航天中心(德国國家航天局)主导的“热流与物理特性探针”,这是一种可自行钻入行星表面以下达5米深的自钻式探针,用于测量来自火星内部的热量逸出。

美国国家航空航天局的火星2020任务。美国下一辆前往火星的漫游车“火星2020”与好奇号火星车有大量技术继承关系,但搭载了全新的仪器。该任务将采用天车部署方法(图4),利用火箭推进的悬停平台通过系绳将漫游车降落到火星表面。然而,此次投放方法结合了地形相对导航技术,使系统能够在选择着陆点时避开危险地形。另一项重大改进是,该漫游车将携带一台能够钻取岩芯并缓存样本的钻机,以供未来可能取回并返回地球。这辆新型漫游车还将具备更强的自主性,包括:(i) 机载调度器,以更有效地利用可用时间、能源和数据量;以及(ii) 能够根据科学家设定的标准自主瞄准仪器(如UPERCAM)的能力,这是目前在火星探测漫游者和好奇号火星车上所使用的AEGI系统的进一步发展。
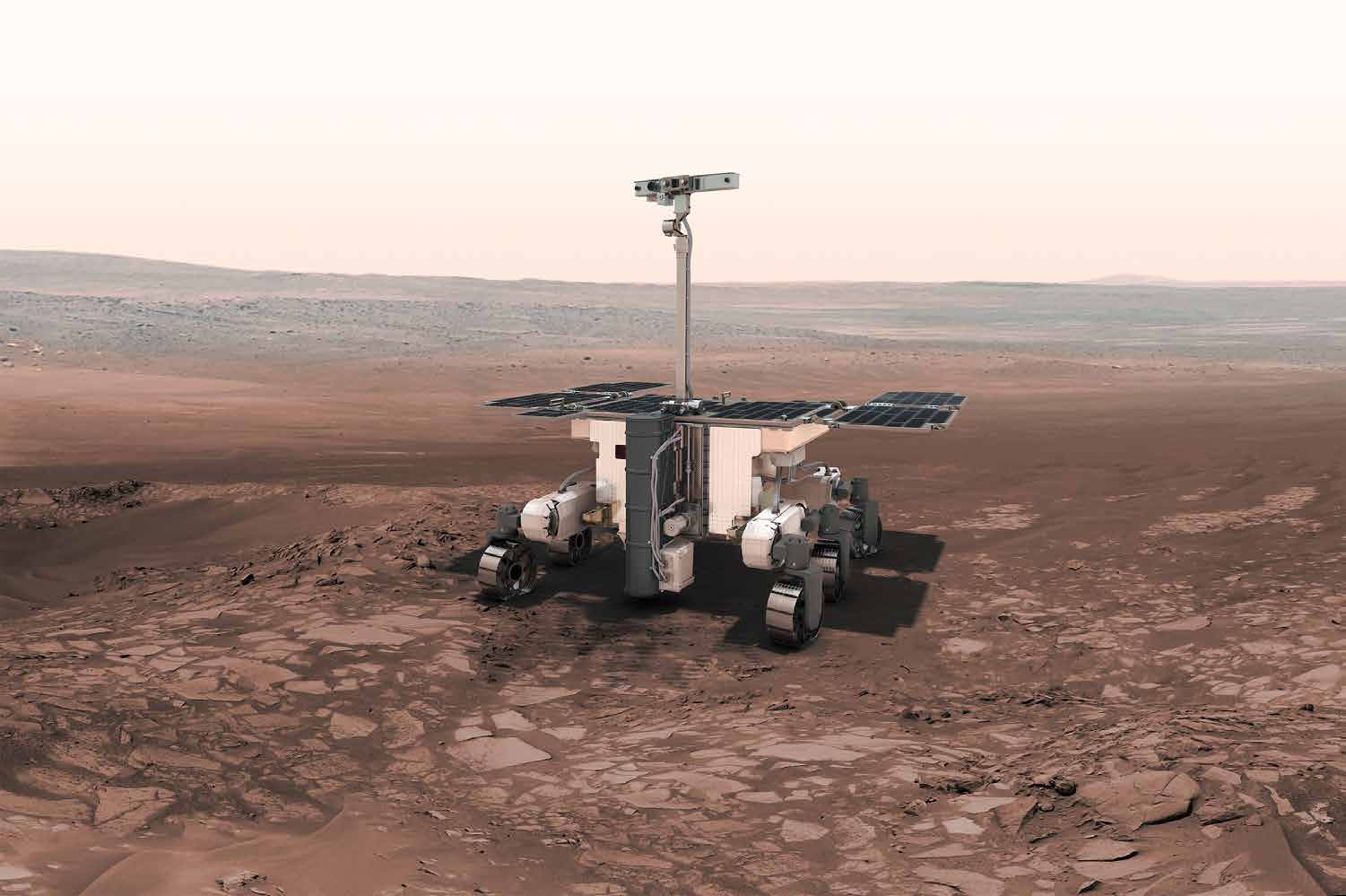
欧洲航天局的外火星2020。目前,外火星(图5)是唯一一项由欧洲资助的任务,该任务大量使用机器人技术,包括自主漫游车、自动化天体生物学实验室和机器人钻探系统;它计划于2020年发射,以补充2016年3月发射的外火星第一阶段任务。外火星漫游车搭载的一套新型仪器将有助于对火星表面进行精确的视觉和光谱表征,研究尺度从全景(米级)到更小的(亚毫米级)以及有机化合物的分子鉴定。地表研究还辅以电磁和中子地下探测,这将进一步帮助了解沉积环境(如沉积、火山和风成)。其独特贡献在于欧洲航天局的火星机器人任务在寻找火星上过去或现存生命迹象方面迈出了重要一步。

欧空局-俄罗斯航天局的火卫一采样返回。另一项正在研究中的机器人任务是PHOOTPRINT(图6),其目标是返回火卫一(火星的卫星)的表面样本。该任务将利用机器人元件在低重力环境下采集表面样本。该任务已在两次欧空局并行设计设施(CDF)研究、一次工业研究中进行了初步评估,最近还在假设其可能成为与俄罗斯航天局(Roscosmos)联合任务的情况下,开展了一项进一步的CDF研究。该任务将于2022年左右需要相关技术。
长期任务概念
为了满足长期探索和科学需求,空间界已提出并研究了多种机器人任务概念,这些概念涵盖了学术界和工业界的共同努力。表4试图以系统化的方式总结这些想法,但并未穷尽所有内容。
表4. 长期空间机器人任务概念(4)。原位资源利用,原位资源利用。
| 目的地 | 建议的任务概念 | 提议的机器人 | 移动 |
|---|---|---|---|
| 地球轨道 | 空间碎片清除,在轨服务,和装配 | 机械臂、手/夹持器鱼叉 | |
| Moon | 样本返回,原位资源利用探索永久阴影陨石坑,准备载人基地 | 漫游车,机械臂,采样器,钻机 | |
| Mars | 样本返回,原位资源利用,载人基地 | 气动外壳,飞机,直升机, 气球, 跳跃探测器, 集群 | |
| 金星 | 探索 | 气球 | |
| 水星 | 探索 | 漫游车 | |
| 小行星 | 样本返回,原位资源利用 | 漫游车,跳跃探测器,机械臂,鱼叉 | |
| 土卫六 | 探索 | 气动外壳,气球机器人,气球,湖泊着陆器,潜艇,飞船,协作机器人 | |
| 木卫二/土卫二 | 探索地下,潜艇,跳跃探测器 | ||
| 气态巨行星 | 探索 | 气球 |
空间机器人演化
新一代空间探索已深入太阳系,以应对更具雄心的科学与探索目标。因此,预计需要具备多样化移动能力(表5)和更高自主水平(图7)的能力更强的空间机器人。目前大多数成功运行的空间机器人被视为在太空中作为人类代理的机器人代理。未来目标日益具有挑战性的空间任务将需要更高的自主性,逐步发展为机器人探索者和机器人助手。
多样化移动与进入
尽管迄今为止的探索任务已取得成功,空间机器人系统实际上仅触及表面。为了进一步增进我们对地球和其他目的地的了解,空间界已提出大量机器人移动解决方案,以探索大片未探索地貌。目前正在开展的激动人心的新工作旨在实现对更极端地形、洞穴以及地外表面的空中探测,或执行轨道上的挑战性任务。表5系统地汇总了迄今为止提出的许多构想,其中部分示例基于美国宇航局资助的研究,在表6中进行了进一步描述。
表5. 未来空间机器人的多样化移动方式(4)。
| 机器人平台 | 机器人移动 |
|---|---|
| 陆地表面 |
- 轮式巡视器
- 履带式巡视器 - 腿式巡视器 - 滚动式(例如球体或圆球)巡视器跳跃探测器 - 气垫车 |
| 空中 |
- 四轴飞行器、直升机或扑翼机
- 飞机或滑翔机 - 气球、蒙戈尔费埃气球、气球机器人 |
| 地下 |
- 钻机(例如冰层钻探或融化、旋转钻探,冲击钻探、双往复钻探)
- 潜艇、深潜器 |
| 操作 |
- 机械臂
- 机械手、夹持器 - 采样器(例如,取芯器,铲斗) |
| 水面 |
- 垂直剖面浮标
- 船,飞船 |
更全面且系统层面的机动性概念是类人机器人技术,尤其是在人类探索太空任务和人机交互的背景下。该领域尤为突出的是美国国家航空航天局的机器宇航员计划,该计划已在其国际空间站 onboard 国际空间站。移动式机器人宇航员半人马座参与了人机协作的沙漠鼠演示,该演示还包括ATHLETE(非人形机械肢体机器人)。德国航空航天中心的贾斯汀平台是另一个类人机器人的例子。
更高的自主水平
提高机器人自主性使得人类能够以更高层次与机器人进行交互或使用机器人——作为人机混合团队中的助手/同伴,或作为目标导向的完全自主探索者。规划、调度和资源管理使机器人代理能够在资源限制内管理自身行为。强大的任务执行系统使自主机器人能够在不确定的执行环境中持续运行。导航、模式与状态估计以及情境感知能力(也称为集成车辆健康管理与预测)使自主机器人能够跟踪自身状态及其在所处环境中的状态在即时环境中进行适当操作。这些技术共同使太空机器人具备更高的生存能力、更强的能力以完成预期任务,并更有效地支持科学。
许多研发(R&D)工作致力于通过新型闭环科学、面向科学目标的规划和可重构自主星载控制来提高传统科学测量的效率。已在实际任务中飞行的航天器应用包括:追踪火星上的尘卷风;为火星探测漫游者(MER)和火星科学实验室(MSL)重新定向火星车测量;以及从轨道上对活跃火山活动监测、冰冻圈和洪水进行监测。未来拟议的应用包括在原始天体上探测和追踪羽流或表面挥发物。
通用人工智能技术(例如,机器学习与适应)的进步对于在多个领域提升太空机器人自主功能具有重要意义。例如,机器学习常被应用于感知与感知任务(如机器视觉)。它也被用于移动,以改进运动策略、政策与导航。全系统自主性、规划、调度和资源分配同样是机器学习持续研究的领域。在人机交互中,针对个体用户或特定任务的自适应学习是当前活跃的研究方向。此外,在多智能体系统中,协调与控制以及数据同化也是机器学习可行的应用领域。
技术需求与挑战
The 电流 desire to exp l 对太空的渴望一如既往地强烈。以往的航天大国正逐渐迎来一批新兴国家,这些国家热切希望测试和展示自己的技术,并为不断增长的知识体系做出贡献。商业活动也将目光投向太空,积极推广月球和火星作为人类长期存在或居住的潜在目的地。无论未来的探索任务是载人的还是机器人,太空机器人都是
一直希望提供机器人化身,通过其“眼睛”、“耳朵”、“鼻子”和“机械手”进行原位任务,以实现代理、协助或探索功能。特别是,机器人技术的目标是扩展人类进入太空的范围或能力,增强我们对资产和资源的操作能力,为人类到达做好环境准备,支持人类机组人员在太空中的运行及其留下的资产,并全面提高任务运行的效率。机器人感知与感知、机动性与操作、交会对接、星载和地面自主能力以及人机集成方面的进步将有助于实现这些目标。
美国国家航空航天局2015年的技术路线图已确定了到2035年所需的多个机器人技术领域。同样,欧洲航天局也通过多个由欧盟委员会资助的项目(如PERASPERA和SpacePlan2020)在推进空间机器人技术领域的技术路线图。其他航天国家如俄罗斯、中国、印度和日本也已宣布各自关于未来涉及空间机器人技术任务的计划。除了各航天国家在任务时间表上的差异外,国际空间界普遍认可机器人技术领域存在诸多技术需求或挑战(见表7)。
商新的业机进遇入空间机器人技术
空间机器人技术的竞争格局正在发生变化。传统上,国家航天机构一直是主要参与者。而最近,商业企业已宣布其意图并进入该领域。这些商业企业正在研究和开发利用月球和小行星资源的方法。月球快车、深空工业和行星资源公司正致力于实现长期目标,即开发利用月球及更远天体中的关键元素。在短期内,地球以外资源的利用可能包括含水物质,以实现原位火箭燃料生产(例如,在月球或火星为返回飞行器提供燃料)。从更长远来看,从月球及其他地方开采氦‐3可为聚变反应堆提供宝贵的燃料。最后,许多地外天体中含有稀有金属(如铁、镍、钴、铂和钛)。作为较近期的目标,其中一些团队正在竞争价值3000万美元的谷歌月球X大奖,该奖项授予在月球表面运行漫游车的企业。
向非太空领域的知识/技术转移
探索与机器人技术是太空产业中一个高度依赖技术并面临巨大挑战以实现任务科学目标的领域。该领域主要涉及上游活动,对太空产业的直接下游效益较小。然而,它在衍生应用方面具有巨大潜力,能够吸纳其他行业的地面技术,并将由此产生的技术进步向外转化。早期研究发现,当前空间机器人技术研发项目取得的进展可能在许多领域产生显著的连锁效应,包括以下方面:
(1) 核设施退役:用于运行后清理、初步退役、中期退役和最终拆除。
(2) 健康与护理:用于机器人手术、诊断、独立生活、护理系统、假肢以及分析与治疗。
(3) 应急服务:用于提高响应能力、降低生命风险以及高效部署。
(4) 深部采矿:用于风能领域的探索、挖掘和提炼,以及涡轮机检查与维护。
(5) 海底机器人:用于海底石油、天然气和矿产资源的探索与开发。
(6) 水工业:用于资产检查、维护和健康状况监测。
(7) 农业行业:用于作物检测和精准农业。
预计与这些领域相关的市场将在未来几年经历巨大增长,基于机器人的产品和服务在这些应用中的采用和引入预计将带来至少1.9万亿美元的经济效益,到2025年实现。
结论
机器人技术已为人类扩展在太空的活动范围展现出新型进入能力。以往的机器人任务实现了独特的科学,增进我们在广泛科学领域的知识。未来机器人任务将继续以更根本的方式改变太空探索的方式,使探索更加频繁、降低成本,并进入更具挑战性和动态的环境。这些任务不仅将持续推进地球以外的机器人探索,还将在进一步推动人类对地球以外的探索中发挥关键作用。
表6. 未来太空探索新型机器人移动概念示例(所有图片由喷气推进实验室/美国国家航空航天局提供)
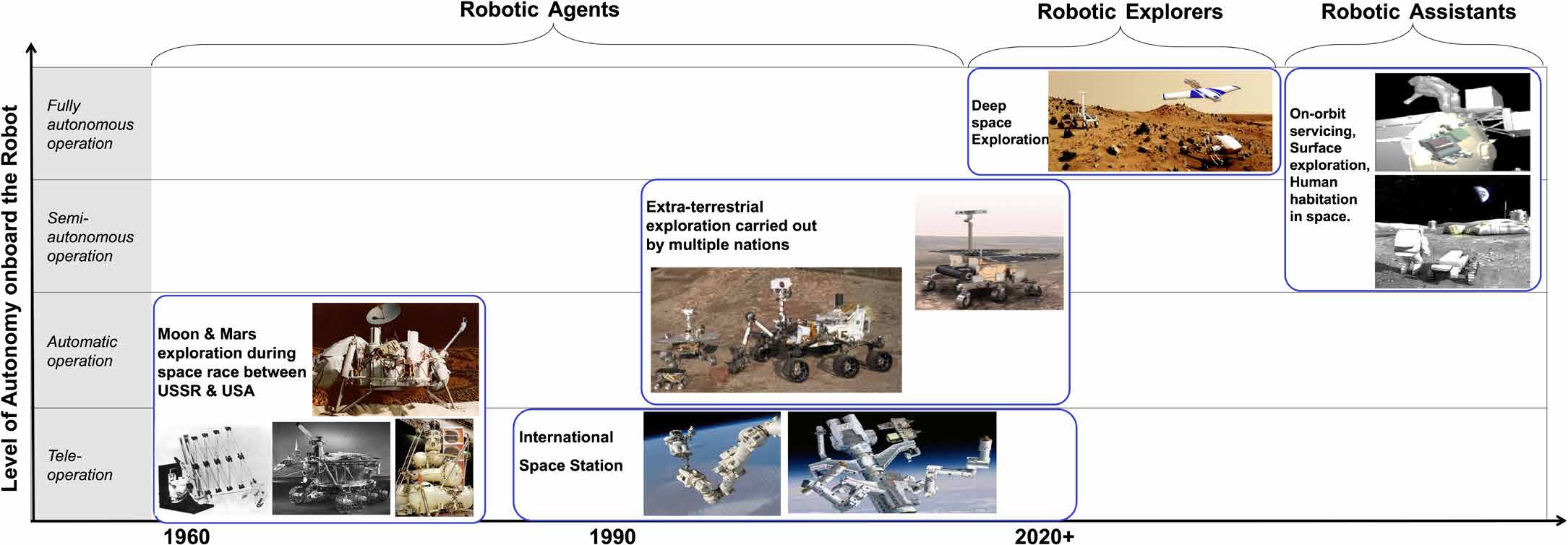
表7. 未来几十年空间机器人技术的需求与挑战。
| 领域 | 目标 | 技术需求或挑战 | 对实现顶尖科学目标的相关性 |
|---|---|---|---|
| 感知与感知 | 为了提供情境感知太空意识机器人代理,探索者,和助手 |
- 新型传感器
- 传感技术 - 三维感知、状态估计算法,和数据融合 - 机载数据处理和通用软件框架 - 物体、事件或活动识别 |
传感器提供了绝大部分直接的科学:
- 增加仪器,包括遥感和原位可实现更精确的测量(例如,空间、光谱分辨率,同时降低体积、质量和功耗。 - 新型仪器正在涌现。成像光谱分析以确定成分;激光雷达用于三维测绘;用于变化检测的干涉雷达检测、结构;用于生命的样品处理探测和天体生物学,以实现新的新类型科学的测量。 |
| 机动性或移动 | 到达并运行在科学关注地点上地外表面或自由空间环境 |
- 在地外表面、内部及上方的机动性表面通过飞行、行走等移动方式攀爬、绳降、钻洞、游泳和航行
- 融化穿透数公里厚的海洋世界的冰壳 - 进行操作以实现有意改变使用移动来探索环境或物体例如放置、组装、挖掘、挖沟,钻孔、采样、抓取和对接 | 移动代表探索的能力环境,例如火星车、气动机器人和潜艇。融化穿过海洋世界的冰层外壳使可居住的海洋得以进入下方。挖掘、挖沟和钻取岩芯能够无需大气污染(例如,火星地质学)或辐射(例如,欧罗巴天体生物学)。 |
| 交会对接和自主性 | 为了实现闭环科学为了更高效 , 新颖的科学(例如,跟踪彗星处的动态羽流) |
- GNC算法
- 对接与捕获机构及接口 - 规划、调度与通用自主性软件框架 - 多智能体协调 - 可重构和可调自主性 - 用于决策的自动化数据分析,故障检测、隔离与恢复/IVHM,和执行 | 增强型制导导航与控制意味着更高精度导航以实现更优科学测量。调度、执行和综合车辆健康管理使能为航天器提供更高效的科学观测时间自动化科学分析与调度能够实现无需地面参与的闭环操作每个任务实现更多的科学周期(即更高的生产力和独特的机遇性科学) |
| 人‐机器人交互 | 为了使人类能够准确且快速理解机器人的状态协作和有效且高效地朝向目标状态 |
- 多模态交互;远程与受控控制控制
- 近距离交互 - 分布式协作与协调 - 通用人机系统接口 | 虚拟现实和增强现实允许更自然的界面来分析大量获取的数据流虚拟现实和增强现实还允许车辆控制的自然方式通过伸手、触摸和手势。 |
| 系统工程 | 为了提供一个框架用于理解与协调复杂交互机器人和实现所需系统需求 |
- 模块化、通用性与接口
- 复杂自适应系统的验证与确认系统 - 机器人建模与仿真 - 软件架构与框架 - 安全和信任 | 数十亿的高风险需要可靠的任務。隨著系統變得越來越複雜,能夠描述機器人行為(特別是對於多車輛集群)也變得越來越具有挑戰性。 |

















 8863
8863

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









