






该模型基于有效磁链进行无传感器控制,为了改善磁链观测器的低速性能,提高低速下观测精度,使用电压电流混合模型,其运行原理为:使用电压模型获取定子磁链,经过有效磁链转化后得到转子磁链,通 过反正切计算得到估计角度值。
将电压模型所得的定子磁链以及估计角度值作为电流模型的输 入,先经过 Park 计算得到 dq 轴的磁链,可根据磁链公式计算出 dq 轴的电流,再由 Park 逆变 换获取估计的定子电流 。
定子电流的误差经过 PI 调节后,反馈至电压模型的输入信号 中,实现完整的闭环控制。
ID:38188682934254994
Keepmoving

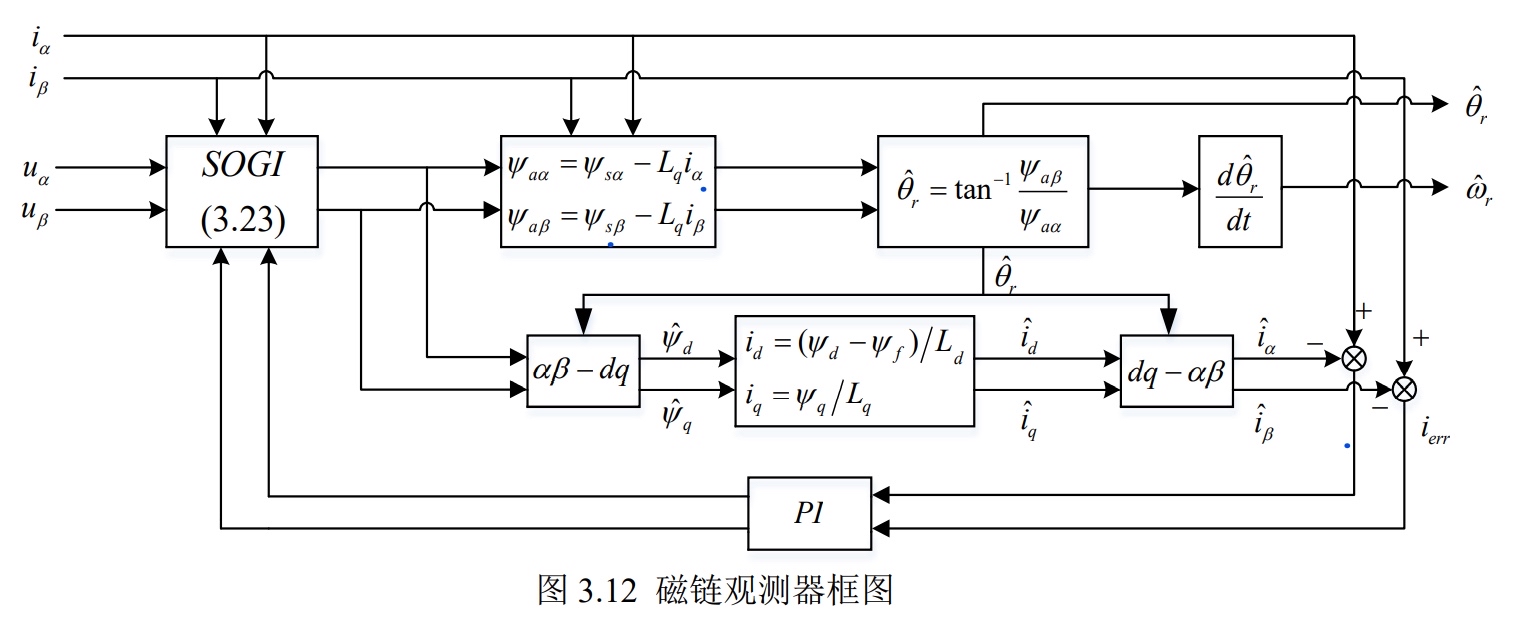


该模型基于有效磁链进行无传感器控制。传统的磁链观测器在低速情况下存在较大的观测误差,为了提高低速下的观测精度,本文采用了电压电流混合模型。该模型的运行原理是通过利用电压模型获取定子磁链,并经过有效磁链转化得到转子磁链,最终根据反正切计算得到估计角度值。
具体实施过程如下:首先,利用电压模型获得定子磁链,并将其以及估计角度值作为电流模型的输入。通过Park变换计算得到dq轴的磁链,并根据磁链公式计算出dq轴的电流。再通过Park逆变换获取估计的定子电流。
为了进一步提高控制精度,本文采用PI调节器对定子电流的误差进行调节,并将调节结果反馈至电压模型的输入信号中,实现完整的闭环控制。这样,通过不断调整电压模型的输入信号,系统能够实时监测和控制磁链的变化,并及时进行调整。
与传统的磁链观测器相比,该模型具有更高的观测精度和稳定性。通过使用电压电流混合模型,我们不仅能够准确地获得定子磁链和转子磁链的信息,还能够根据磁链公式计算出dq轴的电流。通过PI调节器的精确调节,系统能够实现闭环控制,并及时纠正磁链误差。
该模型的应用具有广泛的前景。在各种电机控制系统中,通过有效磁链的观测和控制,我们能够实现更精确的转矩控制和速度控制。同时,该模型无需传感器,可以降低系统成本,并增加系统的可靠性。
总之,该模型基于有效磁链进行无传感器控制,通过电压电流混合模型和PI调节器实现闭环控制,具有较高的观测精度和稳定性。在各种电机控制系统中具有广泛的应用前景。通过本文所介绍的方法,我们可以在实际应用中获得更高的控制精度和系统性能。
相关的代码,程序地址如下:http://fansik.cn/682934254994.html
















 429
429











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









