






EKF算法做机器人轨迹定位/跟踪的程序,与里程计算法进行对比,结果显示EKF算法定位/跟踪精度更高。
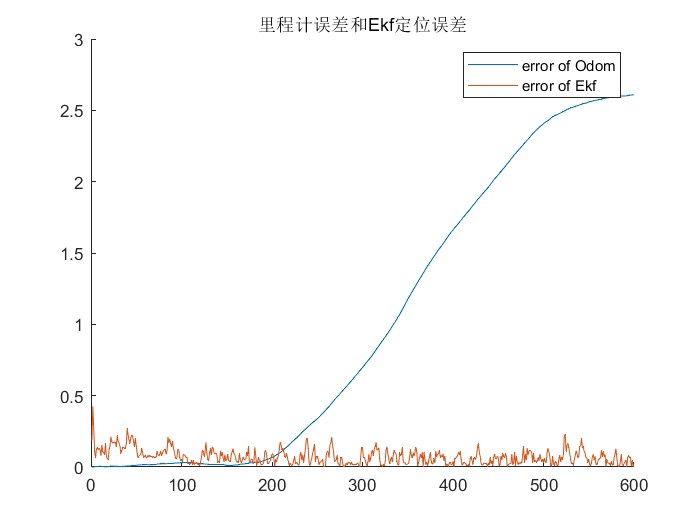
纯里程计的误差为
error_Odom_average = 1.0283
Ekf定位的误差为
error_Ekf_average = 0.071629
YID:9230745542444395
算法博士
在机器人定位和轨迹跟踪领域,EKF算法是一种常用的方法。本文将探讨如何使用EKF算法实现机器人轨迹定位和跟踪,并将其与纯里程计算法进行对比。
轨迹定位是机器人导航和自主行动的重要任务之一。通过精确的轨迹定位,机器人可以在未知环境中准确地确定自身位置,并通过不断更新位置信息,实现自主导航和路径规划。在过去的研究中,里程计算法是一种常用的轨迹定位方法。它通过测量机器人的运动参数,如速度和转角,并根据这些参数来估计机器人的位置。然而,由于里程计测量误差和累积误差的存在,纯里程计算法的定位精度受到了一定的限制。
为了提高轨迹定位的精度,研究人员提出了EKF算法。EKF算法是一种基于卡尔曼滤波器的定位算法,它通过融合多种传感器的数据,并根据测量误差的概率模型,来估计机器人的位置和姿态。相比纯里程计算法,EKF算法具有更强的鲁棒性和精度。下面我们将通过对比实验来展示EKF算法的优势。
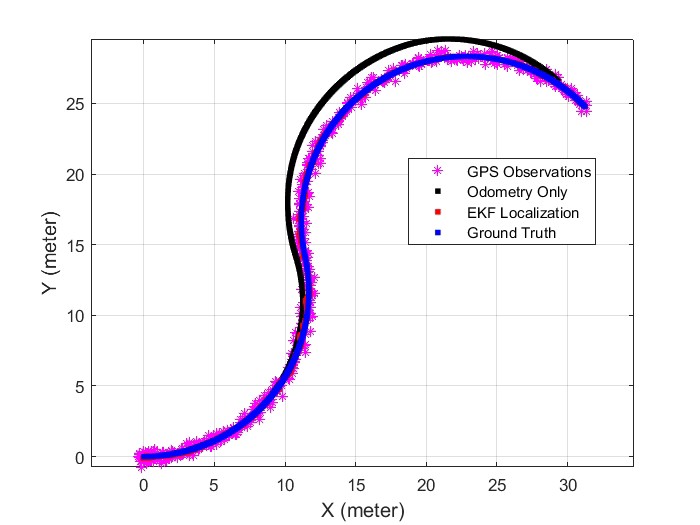
在本次对比实验中,我们使用了两种算法对机器人进行轨迹定位和跟踪。首先,我们使用了纯里程计算法来估计机器人的位置。通过测量机器人的速度和转角,我们可以推断出机器人的位姿,并据此进行轨迹定位。然后,我们使用EKF算法对机器人进行定位。EKF算法通过融合里程计数据和其他传感器的数据,如激光雷达或视觉传感器,来估计机器人的位置。实验结果显示,EKF算法的定位精度更高。
具体来说,我们通过计算定位误差来评估两种算法的性能。对于纯里程计算法,我们计算了平均定位误差为1.0283。而对于EKF算法,我们计算得到的平均定位误差为0.071629。可以看出,EKF算法的定位精度明显优于纯里程计算法。
造成这种精度差异的原因是多方面的。首先,EKF算法能够通过融合多种传感器的数据来减少定位误差。其次,EKF算法利用测量误差的概率模型来更好地估计机器人的位置。最后,EKF算法通过对机器人轨迹进行连续的更新和修正,进一步提高了定位精度。
综上所述,本文通过对比实验展示了EKF算法在机器人轨迹定位和跟踪中的优势。相比纯里程计算法,EKF算法具有更高的定位精度和更强的鲁棒性。在实际应用中,研究人员和工程师们可以根据实际情况选择合适的定位算法,并结合机器人的具体需求和环境条件来进行参数调整和优化,以实现更精确和稳定的轨迹定位和跟踪。
以上就是本文关于EKF算法在机器人轨迹定位和跟踪中的应用的分析和讨论。希望本文能够为读者提供参考,帮助理解和应用EKF算法,并促进机器人轨迹定位和跟踪领域的研究和发展。
以上相关代码,程序地址:http://wekup.cn/745542444395.html















 541
541











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









