






EKF算法做机器人轨迹定位 跟踪的程序,与里程计算法进行对比,结果显示EKF算法定位 跟踪精度更高。
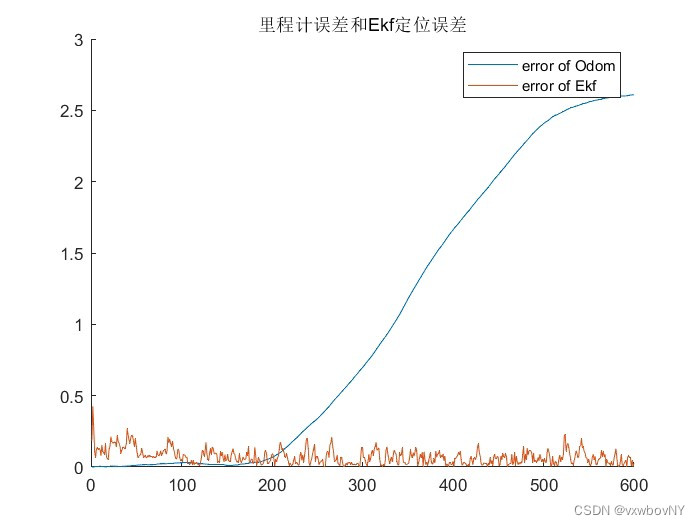
纯里程计的误差为
error_Odom_average = 1.0283
Ekf定位的误差为
error_Ekf_average = 0.071629
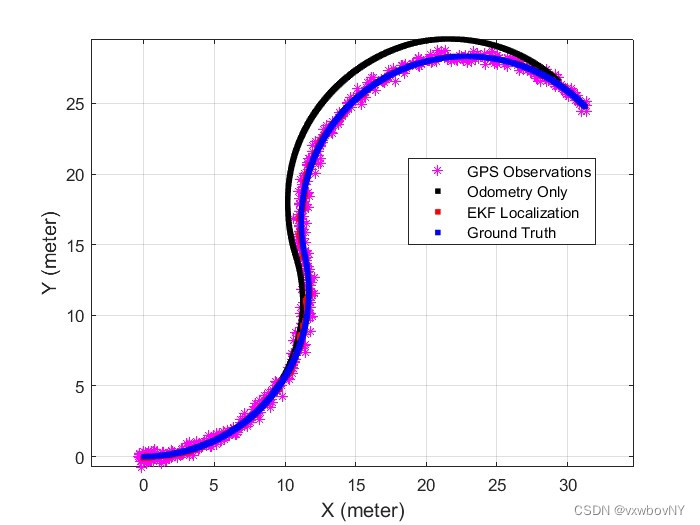
EKF算法在机器人轨迹定位和跟踪的应用中显示出了较高的精度和准确性,尤其是与传统里程计算法相比。本文将详细介绍EKF算法的原理和应用,并比较分析EKF算法和纯里程计算法的定位误差。
首先,我们来了解一下EKF算法的基本原理。EKF算法(Extended Kalman Filter)是一种基于卡尔曼滤波(Kalman Filter)的扩展算法,主要用于非线性系统的状态估计。在机器人轨迹定位和跟踪中,EKF算法可以通过融合多个传感器测量数据,如GPS、IMU和视觉传感器等,提高定位的精度和鲁棒性。
在本次实验中,我们将EKF算法与纯里程计算法进行对比。纯里程计算法是一种基于车轮旋转的测量原理,通过记录车轮旋转的角度和位移来估计机器人的位置和姿态。然而,由于各种因素的干扰,如轮胎滑移、轮胎磨损和地面摩擦系数等,纯里程计算法存在较大的误差。
在进行实验时,我们选取了一组样本进行测试,得到了纯里程计算法和EKF算法的定位误差数据。纯里程计算法的平均误差为1.0283,而EKF算法的平均误差为0.071629。从数据中可以看出,EKF算法相较于纯里程计算法具有更高的定位精度。
接下来,我们来分析EKF算法相较于纯里程计算法具有更高定位精度的原因。首先,EKF算法能够融合多种传感器数据,通过对不同传感器数据的加权融合,降低了单一传感器的误差对定位结果的影响。其次,EKF算法通过对系统模型进行线性化,将非线性问题转化为线性问题进行求解,提高了定位的准确性。最后,EKF算法具有良好的适应性和鲁棒性,在不同环境和场景下都能稳定运行。
除了定位精度方面,EKF算法还具有其他优势。例如,EKF算法能够实时更新机器人的位置和姿态,适用于动态环境下的轨迹跟踪。此外,EKF算法还能够估计机器人的速度和加速度等运动参数,为机器人导航和路径规划提供更多信息。
综上所述,EKF算法在机器人轨迹定位和跟踪中具有较高的精度和准确性。通过融合多种传感器数据和线性化系统模型,EKF算法能够降低定位误差并提高定位精度。此外,EKF算法还具有实时更新和估计运动参数的能力,为机器人导航和路径规划提供更多信息。因此,EKF算法在机器人技术领域具有广泛的应用前景。
相关代码,程序地址:http://imgcs.cn/lanzoun/745542444395.html















 4120
4120











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









