







 RTKLIB是一个开源的GNSS软件库,提供厘米级精度,适用于精密农业、测绘和无人机导航等实时应用。本文通过示例展示了如何使用RTKLIB进行RTK差分定位,包括软件下载、配置参数、导入数据和实时解算过程。
RTKLIB是一个开源的GNSS软件库,提供厘米级精度,适用于精密农业、测绘和无人机导航等实时应用。本文通过示例展示了如何使用RTKLIB进行RTK差分定位,包括软件下载、配置参数、导入数据和实时解算过程。
简介
RTKLIB(Real-Time Kinematic Library)是一款开源的实时差分全球导航卫星系统(GNSS)软件库。它旨在提供高精度的位置解算,特别是在实时应用中,如精密农业、测绘、无人机导航等领域。
RTKLIB支持多种GNSS系统,包括GPS、GLONASS、Galileo、BeiDou等,通过处理卫星信号的相位观测数据,可以实现厘米级别的位置精度。该库提供了一系列的工具和算法,包括实时差分定位、离线后处理、卫星轨道计算等功能。
由于其开源性质,RTKLIB被广泛应用于各种领域,并且用户可以根据需要进行定制和修改。它常用于需要高精度位置信息的应用,其中实时性对于任务成功至关重要。
本文将使用样例数据演示如何使用RTKLIB进行rtk差分定位。
软件及样例数据下载
1、软件下载
访问官网:RTKLIB: An Open Source Program Package for GNSS Positioning
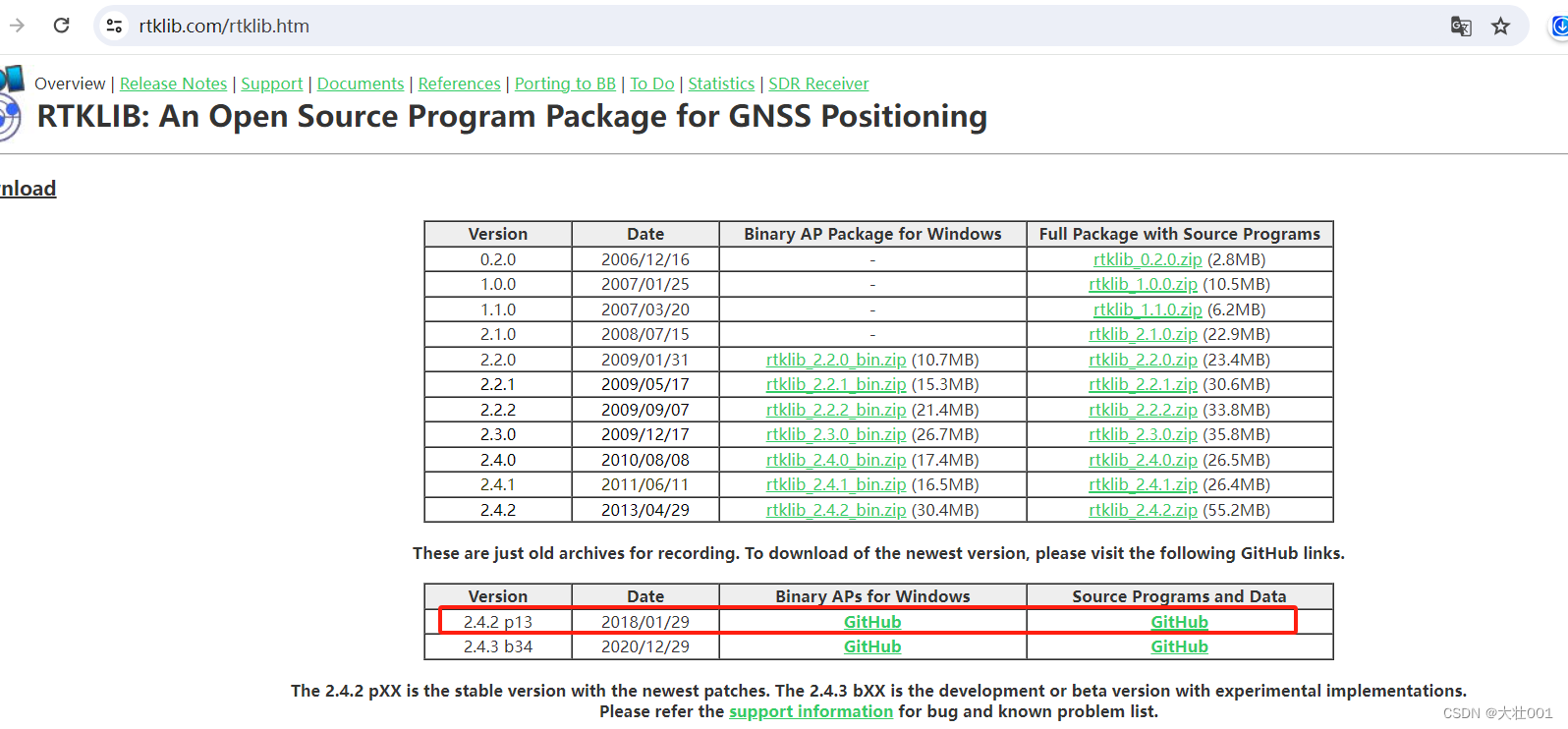
建议下载 2.4.2 p13 这个版本,官网下面的介绍中说明了 2.4.2 pXX 为稳定版本, 2.4.3 bXX 为开发中或者正在测试的版本,千万别下错了!!
两个github链接都下载之后,会得到两个文件:
RTKLIB_bin-master:RTKLIB的可运行文件,可以在windows或者linux上直接运行;
RTKLIB-master:使用C语言编写的源码,可以用于深入了解解算原理或者二次开发。
2、样例数据下载
访问如下地址即可获取:http://www.rtklib.com/prog/rtklib_2.4.2.zip
将上述zip解压到本地。
测试操作过程
下面将介绍如何使用RTKLIB进行 实时动态rtk解算。
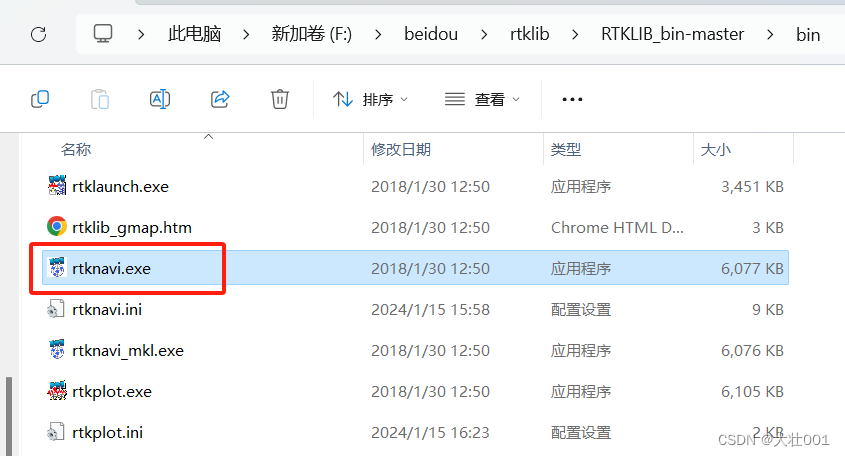
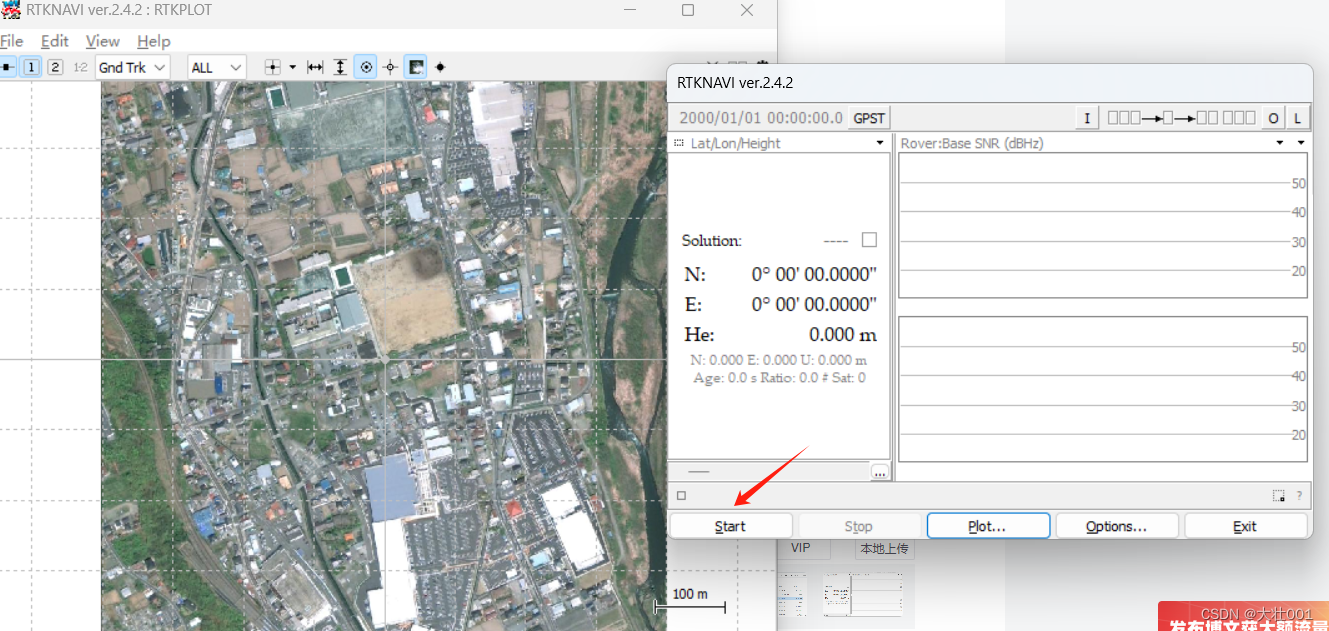
1、双击 rtknavi.exe 打开解算模块,目录在 RTKLIB_bin-master\bin下
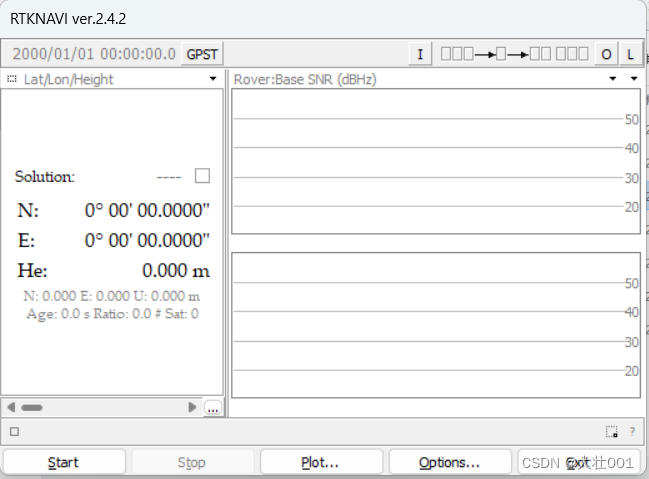
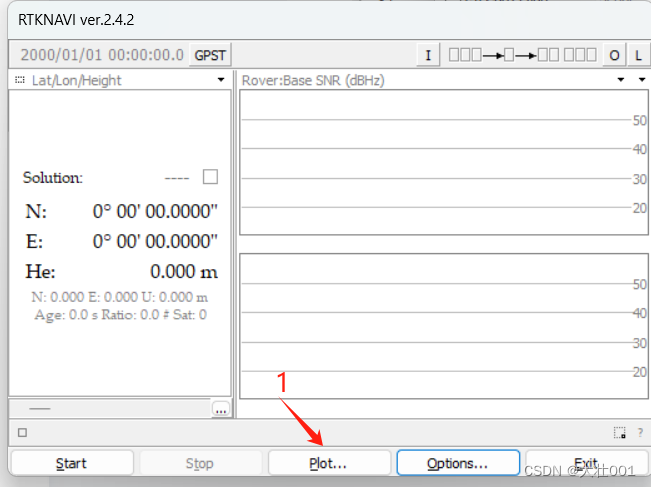
打开后的软件如图:
2、导入配置文件,这一步主要目的是对解算过程进行一些参数配置。依次点击
1、options --> 2、load
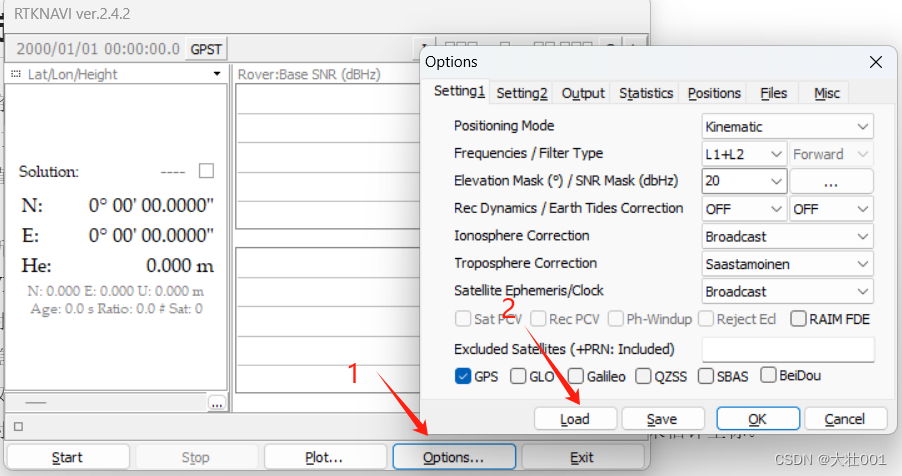
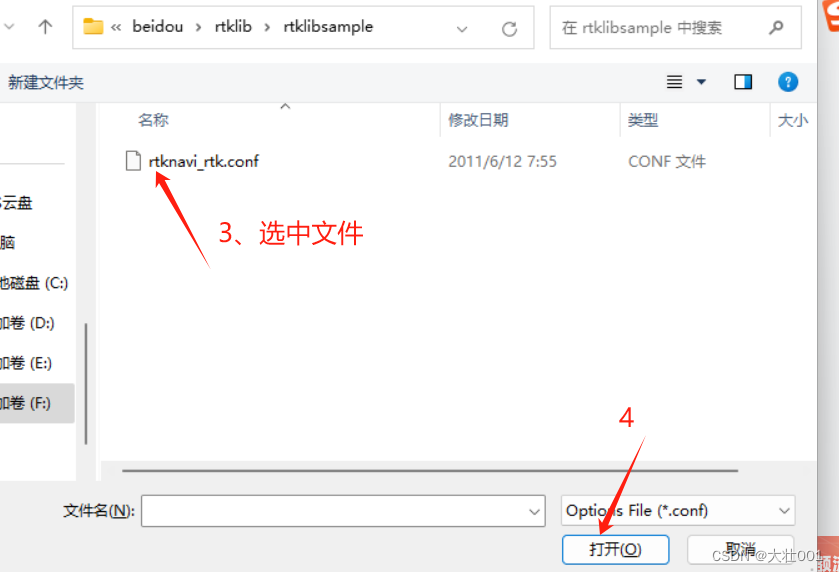
接着依次进行操作: 3、选中文件 --> 4 、打开 --> 5、ok
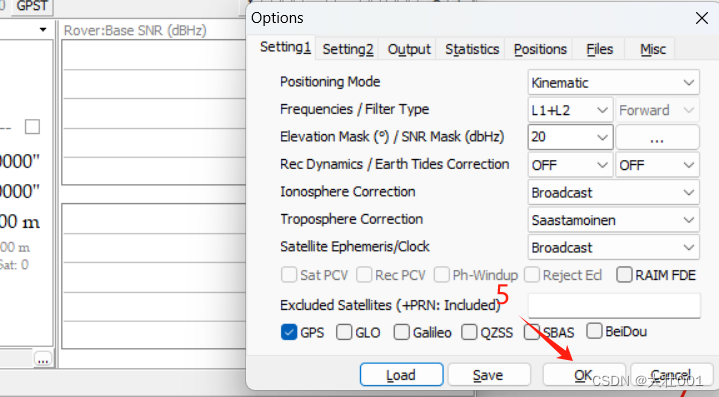
导入配置文件后,面板上将显示 您的定位模式(此次试验为 kinematic卡尔曼滤波)
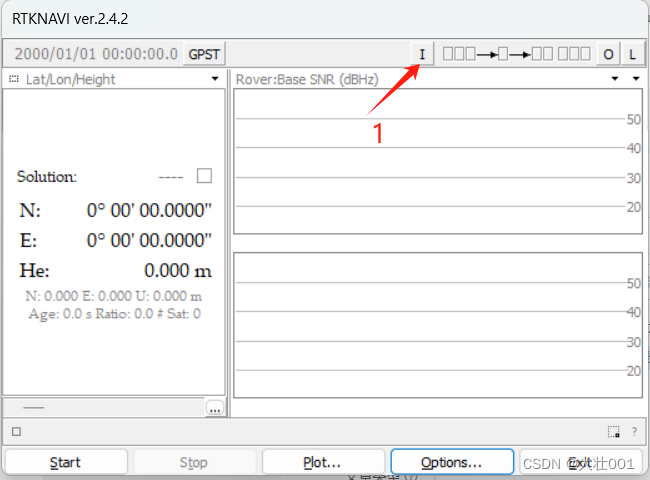
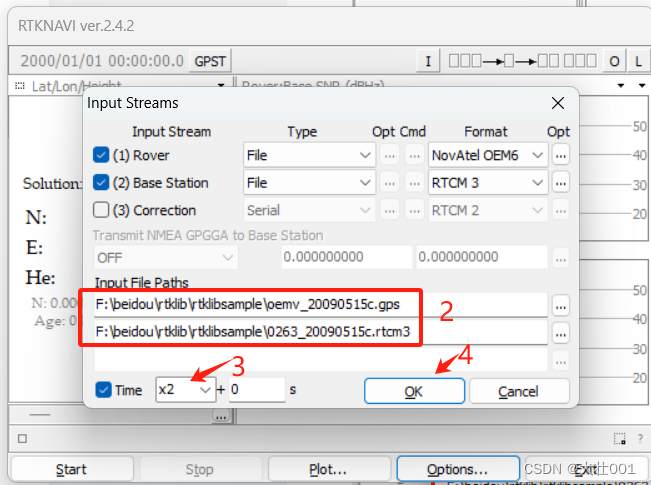
3、接下来进行导入数据操作,本次试验将 导入路测定位数据 以及差分数据
依次点击: 1、 “I” 图标 --> 2、选中下载好的样例数据(分别是 移动站和基准站的数据)--> 3、Time选择 x2 (主要是方便演示)--> 4、OK
4、打开地图
在开始解算之前,先把地图打开,一会将实时把计算结果打印到地图上。
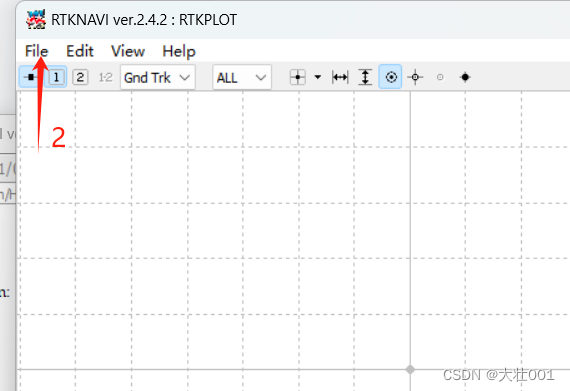
依次点击 1、plot...--> 2、File
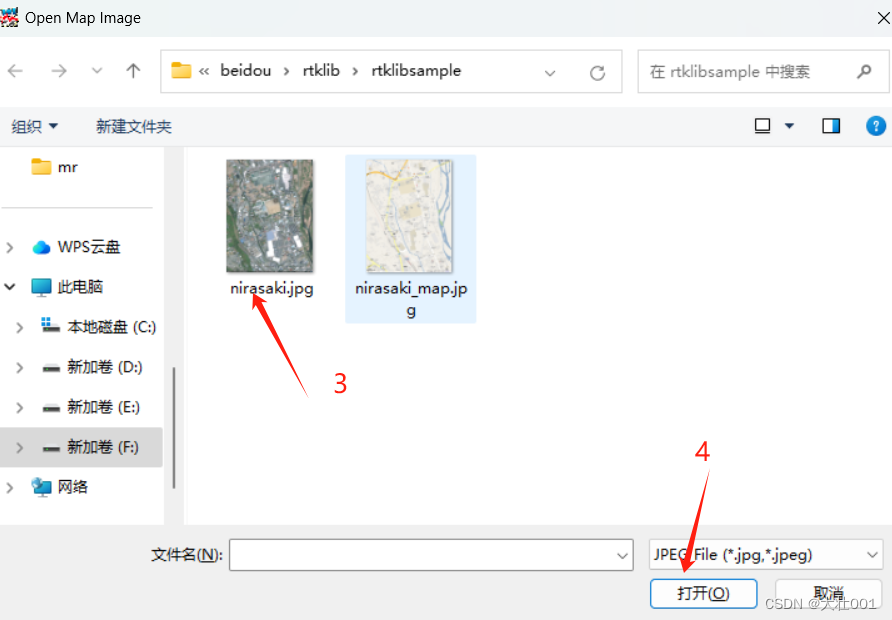
点击 open Map Image, 选中底图,操作如下。(样例中的两张底图任选一张即可)
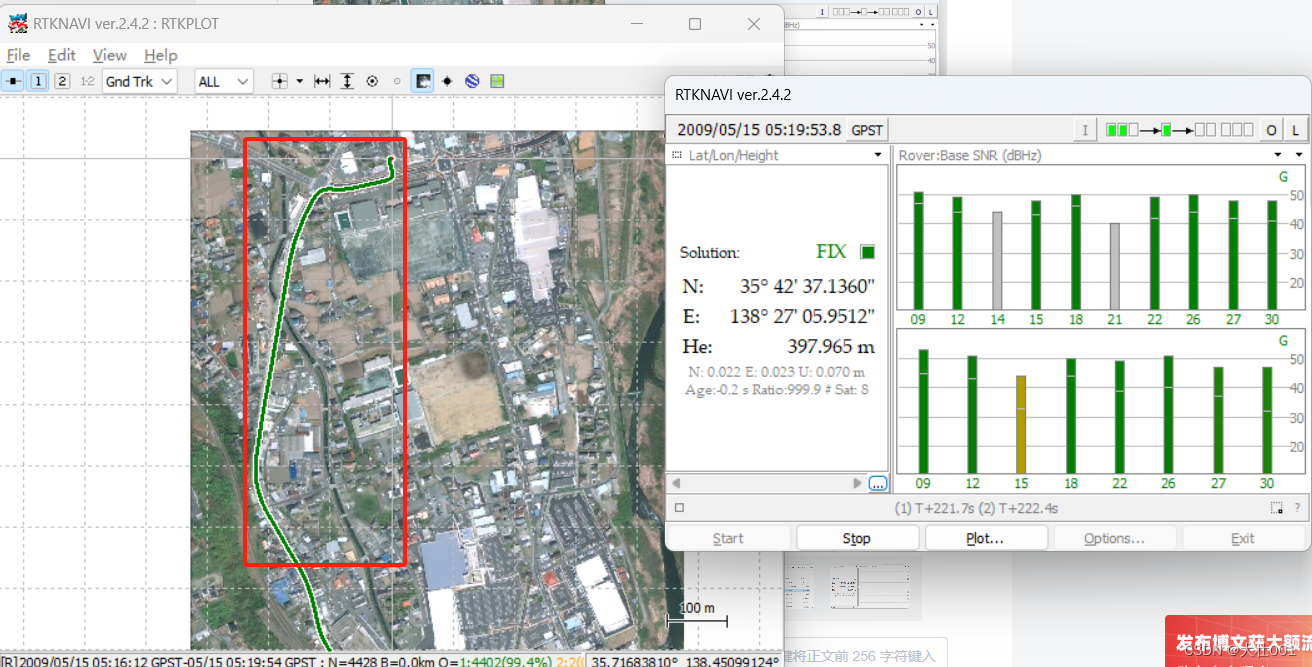
5、开始解算
点击start,在地图上观察输出结果。
几十秒后即可输出结果。

















 6099
6099

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









