







一、输入子系统情景回忆ING......
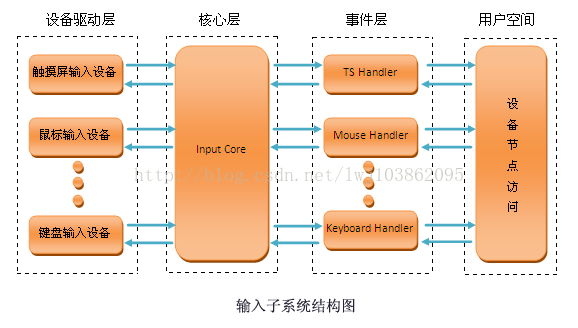
在Linux中,输入子系统是由输入子系统设备驱动层、输入子系统核心层(Input Core)和输入子系统事件处理层(Event Handler)组成。其中设备驱动层提供对硬件各寄存器的读写访问和将底层硬件对用户输入访问的响应转换为标准的输入事件,再通过核心层提交给事件处理层;而核心层对下提供了设备驱动层的编程接口,对上又提供了事件处理层的编程接口;而事件处理层就为我们用户空间的应用程序提供了统一访问设备的接口和驱动层提交来的事件处理。所以这使得我们输入设备的驱动部分不在用关心对设备文件的操作,而是要关心对各硬件寄存器的操作和提交的输入事件。下面用图形来描述一下这三者的关系吧!
drivers/input/input.c:
input_init > err = register_chrdev(INPUT_MAJOR, "input", &input_fops);
static const struct file_operations input_fops = {
.owner = THIS_MODULE,
.open = input_open_file,
};
问:怎么读按键?
input_open_file
struct input_handler *handler = input_table[iminor(inode) >> 5];
new_fops = fops_get(handler->fops) // =>&evdev_fops
file->f_op = new_fops;
err = new_fops->open(inode, file);
app: read > ... > file->f_op->read
input_table数组由谁构造?
input_register_handler
注册input_handler:
input_register_handler
// 放入数组
input_table[handler->minor >> 5] = handler;
// 放入链表
list_add_tail(&handler->node, &input_handler_list);
// 对于每个input_dev,调用input_attach_handler
list_for_each_entry(dev, &input_dev_list, node)
input_attach_handler(dev, handler); // 根据input_handler的id_table判断能否支持这个input_dev
注册输入设备:
input_register_device
// 放入链表
list_add_tail(&dev->node, &input_dev_list);
// 对于每一个input_handler,都调用input_attach_handler
list_for_each_entry(handler, &input_handler_list, node)
input_attach_handler(dev, handler); // 根据input_handler的id_table判断能否支持这个input_dev
input_attach_handler
id = input_match_device(handler->id_table, dev);
error = handler->connect(handler, dev, id);
注册input_dev或input_handler时,会两两比较左边的input_dev和右边的input_handler,
根据input_handler的id_table判断这个input_handler能否支持这个input_dev,
如果能支持,则调用input_handler的connect函数建立"连接"
怎么建立连接?
1. 分配一个input_handle结构体
2.
input_handle.dev = input_dev; // 指向左边的input_dev
input_handle.handler = input_handler; // 指向右边的input_handler
3. 注册:
input_handler->h_list = &input_handle;
inpu_dev->h_list = &input_handle;
evdev_connect
evdev = kzalloc(sizeof(struct evdev), GFP_KERNEL); // 分配一个input_handle
// 设置
evdev->handle.dev = dev; // 指向左边的input_dev
evdev->handle.name = evdev->name;
evdev->handle.handler = handler; // 指向右边的input_handler
evdev->handle.private = evdev;
// 注册
error = input_register_handle(&evdev->handle);
怎么读按键?
app: read
--------------------------
.......
evdev_read
// 无数据并且是非阻塞方式打开,则立刻返回
if (client->head == client->tail && evdev->exist && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
// 否则休眠
retval = wait_event_interruptible(evdev->wait,
client->head != client->tail || !evdev->exist);
谁来唤醒?
evdev_event
wake_up_interruptible(&evdev->wait);
evdev_event被谁调用?
猜:应该是硬件相关的代码,input_dev那层调用的
在设备的中断服务程序里,确定事件是什么,然后调用相应的input_handler的event处理函数
gpio_keys_isr
// 上报事件
input_event(input, type, button->code, !!state);
input_sync(input);
input_event(struct input_dev *dev, unsigned int type, unsigned int code, int value)
struct input_handle *handle;
list_for_each_entry(handle, &dev->h_list, d_node)
if (handle->open)
handle->handler->event(handle, type, code, value);
怎么写符合输入子系统框架的驱动程序?
1. 分配一个input_dev结构体
2. 设置
3. 注册
4. 硬件相关的代码,比如在中断服务程序里上报事件
struct input_dev {
void *private;
const char *name;
const char *phys;
const char *uniq;
struct input_id id;
unsigned long evbit[NBITS(EV_MAX)]; // 表示能产生哪类事件
unsigned long keybit[NBITS(KEY_MAX)]; // 表示能产生哪些按键
unsigned long relbit[NBITS(REL_MAX)]; // 表示能产生哪些相对位移事件, x,y,滚轮
unsigned long absbit[NBITS(ABS_MAX)]; // 表示能产生哪些绝对位移事件, x,y
unsigned long mscbit[NBITS(MSC_MAX)];
unsigned long ledbit[NBITS(LED_MAX)];
unsigned long sndbit[NBITS(SND_MAX)];
unsigned long ffbit[NBITS(FF_MAX)];
unsigned long swbit[NBITS(SW_MAX)];
测试:
1.
hexdump /dev/event1 (open(/dev/event1), read(), )
秒 微秒 类 code value
0000000 0bb2 0000 0e48 000c 0001 0026 0001 0000
0000010 0bb2 0000 0e54 000c 0000 0000 0000 0000
0000020 0bb2 0000 5815 000e 0001 0026 0000 0000
0000030 0bb2 0000 581f 000e 0000 0000 0000 0000
2. 如果没有启动QT:
cat /dev/tty1
按:s2,s3,s4
就可以得到ls
或者:
exec 0</dev/tty1
然后可以使用按键来输入
3. 如果已经启动了QT:
可以点开记事本
然后按:s2,s3,s4
直接上驱动源代码:
#include <linux/errno.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/input.h>
#include <linux/init.h>
#include <linux/serio.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/clk.h>
#include <asm/io.h>
#include <asm/irq.h>
#include <asm/plat-s3c24xx/ts.h>
#include <asm/arch/regs-adc.h>
#include <asm/arch/regs-gpio.h>
struct s3c_ts_regs {
unsigned long adccon;
unsigned long adctsc;
unsigned long adcdly;
unsigned long adcdat0;
unsigned long adcdat1;
unsigned long adcupdn;
};
static struct input_dev *s3c_ts_dev;
static volatile struct s3c_ts_regs *s3c_ts_regs;
static struct timer_list ts_timer;
static void enter_wait_pen_down_mode(void)
{
s3c_ts_regs->adctsc = 0xd3;
}
static void enter_wait_pen_up_mode(void)
{
s3c_ts_regs->adctsc = 0x1d3;
}
static void enter_measure_xy_mode(void)
{
s3c_ts_regs->adctsc = (1<<3)|(1<<2);
}
static void start_adc(void)
{
s3c_ts_regs->adccon |= (1<<0);
}
static int s3c_filter_ts(int x[], int y[])
{
#define ERR_LIMIT 10
int avr_x, avr_y;
int det_x, det_y;
avr_x = (x[0] + x[1])/2;
avr_y = (y[0] + y[1])/2;
det_x = (x[2] > avr_x) ? (x[2] - avr_x) : (avr_x - x[2]);
det_y = (y[2] > avr_y) ? (y[2] - avr_y) : (avr_y - y[2]);
if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT))
return 0;
avr_x = (x[1] + x[2])/2;
avr_y = (y[1] + y[2])/2;
det_x = (x[3] > avr_x) ? (x[3] - avr_x) : (avr_x - x[3]);
det_y = (y[3] > avr_y) ? (y[3] - avr_y) : (avr_y - y[3]);
if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT))
return 0;
return 1;
}
static void s3c_ts_timer_function(unsigned long data)
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
/* 已经松开 */
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
/* 测量X/Y坐标 */
enter_measure_xy_mode();
start_adc();
}
}
static irqreturn_t pen_down_up_irq(int irq, void *dev_id)
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
//printk("pen up\n");
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
//printk("pen down\n");
//enter_wait_pen_up_mode();
enter_measure_xy_mode();
start_adc();
}
return IRQ_HANDLED;
}
static irqreturn_t adc_irq(int irq, void *dev_id)
{
static int cnt = 0;
static int x[4], y[4];
int adcdat0, adcdat1;
/* 优化措施2: 如果ADC完成时, 发现触摸笔已经松开, 则丢弃此次结果 */
adcdat0 = s3c_ts_regs->adcdat0;
adcdat1 = s3c_ts_regs->adcdat1;
if (s3c_ts_regs->adcdat0 & (1<<15))
{
/* 已经松开 */
cnt = 0;
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
enter_wait_pen_down_mode();
}
else
{
// printk("adc_irq cnt = %d, x = %d, y = %d\n", ++cnt, adcdat0 & 0x3ff, adcdat1 & 0x3ff);
/* 优化措施3: 多次测量求平均值 */
x[cnt] = adcdat0 & 0x3ff;
y[cnt] = adcdat1 & 0x3ff;
++cnt;
if (cnt == 4)
{
/* 优化措施4: 软件过滤 */
if (s3c_filter_ts(x, y))
{
//printk("x = %d, y = %d\n", (x[0]+x[1]+x[2]+x[3])/4, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_X, (x[0]+x[1]+x[2]+x[3])/4);
input_report_abs(s3c_ts_dev, ABS_Y, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 1);
input_report_key(s3c_ts_dev, BTN_TOUCH, 1);
input_sync(s3c_ts_dev);
}
cnt = 0;
enter_wait_pen_up_mode();
/* 启动定时器处理长按/滑动的情况 */
mod_timer(&ts_timer, jiffies + HZ/100);
}
else
{
enter_measure_xy_mode();
start_adc();
}
}
return IRQ_HANDLED;
}
static int s3c_ts_init(void)
{
struct clk* clk;
/* 1. 分配一个input_dev结构体 */
s3c_ts_dev = input_allocate_device();
/* 2. 设置 */
/* 2.1 能产生哪类事件 */
set_bit(EV_KEY, s3c_ts_dev->evbit);
set_bit(EV_ABS, s3c_ts_dev->evbit);
/* 2.2 能产生这类事件里的哪些事件 */
set_bit(BTN_TOUCH, s3c_ts_dev->keybit);
input_set_abs_params(s3c_ts_dev, ABS_X, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_Y, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_PRESSURE, 0, 1, 0, 0);
/* 3. 注册 */
input_register_device(s3c_ts_dev);
/* 4. 硬件相关的操作 */
/* 4.1 使能时钟(CLKCON[15]) */
clk = clk_get(NULL, "adc");
clk_enable(clk);
/* 4.2 设置S3C2440的ADC/TS寄存器 */
s3c_ts_regs = ioremap(0x58000000, sizeof(struct s3c_ts_regs));
/* bit[14] : 1-A/D converter prescaler enable
* bit[13:6]: A/D converter prescaler value,
* 49, ADCCLK=PCLK/(49+1)=50MHz/(49+1)=1MHz
* bit[0]: A/D conversion starts by enable. 先设为0
*/
s3c_ts_regs->adccon = (1<<14)|(49<<6);
request_irq(IRQ_TC, pen_down_up_irq, IRQF_SAMPLE_RANDOM, "ts_pen", NULL);
request_irq(IRQ_ADC, adc_irq, IRQF_SAMPLE_RANDOM, "adc", NULL);
/* 优化措施1:
* 设置ADCDLY为最大值, 这使得电压稳定后再发出IRQ_TC中断
*/
s3c_ts_regs->adcdly = 0xffff;
/* 优化措施5: 使用定时器处理长按,滑动的情况
*
*/
init_timer(&ts_timer);
ts_timer.function = s3c_ts_timer_function;
add_timer(&ts_timer);
enter_wait_pen_down_mode();
return 0;
}
static void s3c_ts_exit(void)
{
free_irq(IRQ_TC, NULL);
free_irq(IRQ_ADC, NULL);
iounmap(s3c_ts_regs);
input_unregister_device(s3c_ts_dev);
input_free_device(s3c_ts_dev);
del_timer(&ts_timer);
}
module_init(s3c_ts_init);
module_exit(s3c_ts_exit);
MODULE_LICENSE("GPL");
开发流程总结:
1.按键按下,产生触摸屏中断
2.启动AD转换,测量X/Y坐标
3.AD结束,把X/Y坐标上报
4.AD结束时,同时启动定时器,处理长按或者滑动















 984
984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









