







11、物体的平移、缩放、旋转
-
在父级坐标系中,物体的缩放和旋转看似简单——无非是改变大小或调整角度,实则暗藏玄机,变得复杂难懂。
//先定位办公楼 const tempScene = scene.children.find(t => t.name == 'Scene') const tempOffice= tempScene.children.find(t => t.name == '办公楼'); const worldPosition = new THREE.Vector3(); let newOffice1 = tempOffice.clone(); console.log('局部坐标(移动前):', newOffice1.position); newOffice1.position.set(150,0,30); newOffice1.name="新办公楼1"; scene.add(newOffice1); let newOffice2 = tempOffice.clone(); newOffice2.translateZ(105); //先移动在旋转 newOffice2.translateX(100); newOffice2.rotateY(Math.PI/2) //newOffice2.translateX(-270);//先旋转再移动 //newOffice2.translateZ(100); //newOffice2.position.set(250,0,30); //或直接设置位置 newOffice2.scale.set(1.5, 1, 1.5) newOffice2.name="新办公楼2"; scene.add(newOffice2); newOffice2.updateMatrix(); console.log('当前矩阵:', newOffice2.matrix); console.log('局部坐标(移动后):', newOffice2.position); newOffice2.getWorldPosition(worldPosition); console.log('全局坐标(移动后):', worldPosition);运行结果:

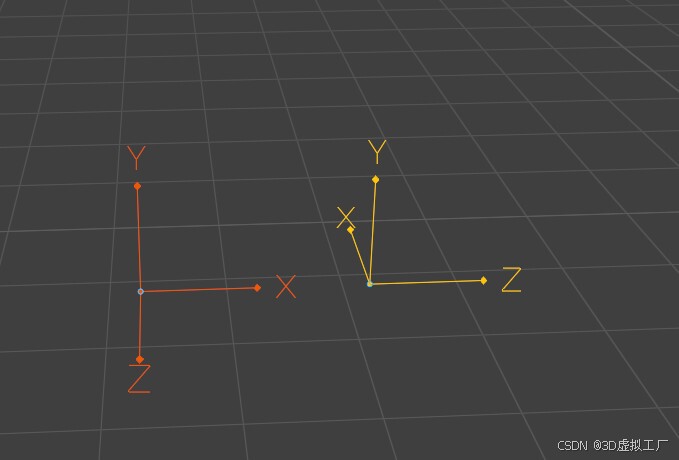
左边只是克隆平移。右边克隆、平移、旋转、缩放。
打印结果:当前矩阵: -3.33e-16, 0, -1.5000000000000004, 0, 0, 1,0, 0, 1.5, 0, -3.3306690738754696e-16, 0, 250, 0,30, 1 全局坐标(移动前): Object { x: 250, y: 0, z: 30 } 局部坐标(移动后): Object { x: 250, y: 0, z: 30 }📍当前矩阵也可以在 threejs场景->新办公楼2->matrix中查看。
-
在 Three.js 中,Object3D.matrix 是一个 4x4 变换矩阵,通常包含以下变换(按计算顺序排列):
- 完整矩阵结构
一个典型的 matrix.elements 数组(列主序):
[
m11, m12, m13, m14, // 旋转/缩放 (X轴基向量 + 位移X)
m21, m22, m23, m24, // 旋转/缩放 (Y轴基向量 + 位移Y)
m31, m32, m33, m34, // 旋转/缩放 (Z轴基向量 + 位移Z)
m41, m42, m43, m44 // 通常为 [0, 0, 0, 1](齐次坐标)
]
-
主要变换成分
变换类型 矩阵区块 说明 缩放 (Scale) 左上 3x3 的对角线 [scaleX, 0, 0],[0, scaleY, 0],[0, 0, scaleZ]旋转 (Rotation) 左上 3x3 的非对角线 由旋转后的基向量组成(受四元数 quaternion或欧拉角rotation控制)平移 (Translation) 最后一行 [0, 0, 0, 1](齐次坐标的标准设置)
📍齐次坐标是一种用于表示几何点的坐标系统。以三维物体上的点(1,5,6)为例,它原本有XYZ三个坐标。若要使该点发生位置变化,需引入齐次坐标,将其表示为(1,5,6,1)。这可以理解为四维空间在三维空间的一个投影。
-
完整矩阵结构
元素 说明 典型值 元素 说明 典型值 m11 X轴基向量X (缩放/旋转) scaleX/1.0m31 Z轴基向量X (旋转) 0.0m12 X轴基向量Y (旋转) 0.0m32 Z轴基向量Y (旋转) 0.0m13 X轴基向量Z (旋转) 0.0m33 Z轴基向量Z (缩放/旋转) scaleZ/1.0m14 平移X translateXm34 平移Z translateZm21 Y轴基向量X (旋转) 0.0m41 齐次坐标 标准为0 m22 Y轴基向量Y (缩放/旋转) scaleY/1.0m42 齐次坐标 标准为0 m23 Y轴基向量Z (旋转) 0.0m43 齐次坐标 标准为0 m24 平移Y translateYm44 齐次坐标 顶点为1向量为0
将打印结果优化一下,优化浮点误差(-3.33e-16≈0 的项视为 0,1.5000000000000004 ≈ 1.5):
[
-3.33e-16, 0, -1.5, 0, -> 0, 0,-1.5, 0,(m11, m21, m31, m41) -> 行列转换 0, 0,1.5,250,(m11, m12, m13, m14)
0, 1,0, 0, 0, 1, 0, 0,(m12, m22, m32, m42) 0, 1, 0, 0,(m21, m22, m23, m24)
1.5, 0, -3.33e-16, 0, 1.5, 0, 0, 0,(m13, m23, m33, m43) -1.5, 0, 0, 30,(m31, m32, m33, m34)
250, 0,30, 1 250, 0, 30, 1 (m14, m24, m34, m44) 0, 0, 0, 1 (m41, m42, m43, m44)
]
- 🏷️提取平移(Translation),平移信息直接来自矩阵的最后一列(m14, m24, m34),结果:( 250, 0, 30),对应代码:newOffice2.position.set(250,0,30)
- 🏷️提取缩放(Scale),结果:(1.5, 1, 1.5) 对应代码:newOffice2.scale.set(1.5, 1, 1.5)
💠X 轴缩放(第 1 列):
0
2
+
0
2
+
(
−
1.5
)
2
=
1.5
\sqrt{0^2 + 0^2 + (-1.5)^2} = 1.5
02+02+(−1.5)2=1.5
💠Y 轴缩放(第 2 列):
0
2
+
1
2
+
0
2
=
1
\sqrt{0^2 + 1^2 + 0^2} = 1
02+12+02=1
💠Z 轴缩放(第3列):
1.
5
2
+
0
2
+
0
2
=
1.5
\sqrt{1.5^2 + 0^2 + 0^2} = 1.5
1.52+02+02=1.5
- 🏷️提取旋转(Rotation)
💠X 轴方向(第 1 列 [0, 0, -1.5])→ 归一化 [0, 0, -1] ⭕X轴变为-Z轴方向
💠Y 轴方向(第 2 列 [0, 1, 0])→ 归一化 [0, 1, 0] ⭕Y轴不变
💠Z 轴方向(第 3 列 [1.5, 0, 0])→ 归一化 [1, 0, 0] ⭕ Z轴变为X轴正方向
结果:从Y正方向看原点,逆时针旋转90°,对应代码:newFactory2.rotateY(Math.PI/2)
如果先旋转再移动
//newOffice2.translateZ(105);
//newOffice2.translateX(100);
newOffice2.rotateY(Math.PI/2)
newOffice2.translateX(-105);//原本向Z移动105就得向X移动-105
newOffice2.translateZ(100);//原本向X移动100就得向Z移动100
-
最后验证矩阵转换结果:Blender局部坐标(31, -9, 25.5)变换为three.js局部坐标(31, 25.5, 9)。如需了解具体转换方法,请参考三维坐标系说明。

-
给定变换矩阵:
M = [ 0 0 1.5 250 0 1 0 0 − 1.5 0 0 30 0 0 0 1 ] M = \begin{bmatrix} 0 & 0 & 1.5 & 250 \\ 0 & 1 & 0 & 0 \\ -1.5 & 0 & 0 & 30 \\ 0 & 0 & 0 & 1 \end{bmatrix} M= 00−1.5001001.50002500301 -
顶点:
v = ( 31 , 25.5 , 9 , 1 ) v = (31,\ 25.5,\ 9,\ 1) v=(31, 25.5, 9, 1) -
计算步骤
v ′ = M ∗ v = [ 0 ∗ 31 + 0 ∗ 25.5 + 1.5 ∗ 9 + 250 ∗ 1 0 ∗ 31 + 1 ∗ 25.5 + 0 ∗ 9 + 0 ∗ 1 − 1.5 ∗ 31 + 0 ∗ 25.5 + 0 ∗ 9 + 30 ∗ 1 0 ∗ 31 + 0 ∗ 25.5 + 0 ∗ 9 + 1 ∗ 1 ] v' = M \ast v = \begin{bmatrix} 0 * 31 + 0 * 25.5 + 1.5 * 9 + 250 * 1 \\ 0 * 31 + 1 * 25.5 + 0 * 9 + 0 * 1 \\ -1.5 * 31 + 0 * 25.5 + 0 * 9 + 30 * 1 \\ 0 * 31 + 0 * 25.5 + 0 * 9 + 1 * 1 \end{bmatrix} v′=M∗v= 0∗31+0∗25.5+1.5∗9+250∗10∗31+1∗25.5+0∗9+0∗1−1.5∗31+0∗25.5+0∗9+30∗10∗31+0∗25.5+0∗9+1∗1 -
逐项计算:
-
v x ′ v_x' vx′:
0 + 0 + 13.5 + 250 = 263.5 0 + 0 + 13.5 + 250 = 263.5 0+0+13.5+250=263.5 -
v y ′ v_y' vy′:
0 + 25.5 + 0 + 0 = 25.5 0 + 25.5 + 0 + 0 = 25.5 0+25.5+0+0=25.5 -
v z ′ v_z' vz′:
− 46.5 + 0 + 0 + 30 = − 16.5 -46.5 + 0 + 0 + 30 = -16.5 −46.5+0+0+30=−16.5 -
v w ′ v_w' vw′:
0 + 0 + 0 + 1 = 1 0 + 0 + 0 + 1 = 1 0+0+0+1=1
-
-
最终结果
变换后的顶点坐标为:
( 263.5 , 25.5 , − 16.5 , 1 ) (263.5,\ 25.5,\ -16.5,\ 1) (263.5, 25.5, −16.5, 1)
转换为blender坐标就是:
( 263.5 , 16.5 , 25.5 , 1 ) (263.5,\ 16.5,\ 25.5,\ 1) (263.5, 16.5, 25.5, 1)

-
点击【专栏目录】查看专栏其他内容。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











