







文章目录
一、如何使用和修改现有网络模型?
1.1 参数pretrained 为false和true时的区别?
vgg16_false = torchvision.models.vgg16(pretrained = False) #False,下载的是网络模型,默认参数
vgg16_true = torchvision.models.vgg16(pretrained = True) #True,下载的是网络模型,并且在数据集上面训练好的参数。
1)pretrained=False时,只是加载网络模型,把神经网络的代码加载了进来,其中的参数都是默认的参数,不需要下载。
2)pretrained=True时,它就要去从网络中下载,比如说卷积层对应的参数时多少,池化层对应的参数时多少等。这些参数都是在 ImageNet 数据集中训练好的。
1.2 使用和修改现有网络模型(例:vgg16)
import torchvision
from torch import nn
vgg16_false = torchvision.models.vgg16(pretrained=False)
vgg16_true = torchvision.models.vgg16(pretrained=True)
print(vgg16_true)
train_data = torchvision.datasets.CIFAR10('./dataset_ts', train=True, transform=torchvision.transforms.ToTensor(), download=True)
# vgg16最后训练出的模型为100个类别,而CIFAR10为10个类别,我们应该如何修改?
# 我们需要在线性层后面在加一个线性层,或者直接修改
# 1)要在vgg16的classifier下加一层模型
# 名叫add_linear的module名,in_feature=1000,out_feature=10
vgg16_true.classifier.add_module('add_linear', nn.Linear(1000, 10))
print(vgg16_true)
print(vgg16_false)
# 2)修改最后一行结构为out_feature=10
vgg16_false.classifier[6] = nn.Linear(4096, 10)
print(vgg16_false)
二、模型的保存和加载
import torch
import torchvision
vgg16 = torchvision.models.vgg16(weights=None)
# 保存方式1:保存模型结构和参数
torch.save(vgg16, "vgg16_method1.pth")
# 保存方式2:保存模型参数(将参数用字典形式保存)(官方推荐)
torch.save(vgg16.state_dict(), "vgg16_method2.pth")
# 加载方式1:
model1 = torch.load("vgg16_method1.pth")
print(model1)
# 加载方式2:
# 用第2种保存方式,如果想要恢复模型结构使用load_state_dict;否则,将以字典形式读入
model2 = torchvision.models.vgg16(weights=None)
model2.load_state_dict(torch.load("vgg16_method2.pth"))
print(model2)
# 加载方式1存在一个陷阱
# 在加载自己定义的模型时,需要导入该模型的类:from 自定义模型类 import *
三、完整的训练模型套路
3.1 构建自己的模型model.py
import torch
from torch import nn
from torch.nn import Sequential, Conv2d, MaxPool2d, Flatten, Linear
class Mymodel(nn.Module):
def __init__(self):
super(Mymodel, self).__init__()
# 这里构建CIFAR 10 model结构
self.model = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64), # 64*4*4=1024
Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
if __name__ == '__main__':
mymodel = Mymodel()
input = torch.ones((64, 3, 32, 32))
output = mymodel(input)
print(output.shape)
3.2 训练过程
import torch
import torchvision
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from model import *
# 1. 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=torchvision.transforms.ToTensor(), download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=torchvision.transforms.ToTensor(), download=True)
# 2. length长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 常用format这种方式输出训练集长度
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 3. 利用DataLoader加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 4. 搭建神经网络
mymodel = Mymodel()
# 5. 损失函数
loss_fn = nn.CrossEntropyLoss()
# 6. 优化器:设置学习速率为0.01
learning_rate = 1e-2
optimzer = torch.optim.SGD(mymodel.parameters(), lr=learning_rate)
# 7. 设置训练网络的一些参数:训练次数,测试次数,训练轮数
total_train_step = 0
total_test_step = 0
epoch = 10
# 添加tensorboard
writer = SummaryWriter("logs")
# 8. 开始训练
for i in range(epoch):
print("-----第{}轮训练开始-----".format(i + 1))
# 1)训练步骤开始
mymodel.train() # 当模型中出现特殊的层时使用,比如Dropout,BatchNorm等
for data in train_dataloader:
imgs, targets = data
outputs = mymodel(imgs)
loss = loss_fn(outputs, targets)
# 优化器模型
optimzer.zero_grad()
loss.backward()
optimzer.step()
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
print("训练次数:{},loss:{}".format(total_train_step, loss.item()))
writer.add_scalar("train_loss", loss.item(), total_train_step)
# 2)测试步骤开始
mymodel.eval() # 当模型中出现特殊的层时使用,比如Dropout,BatchNorm等
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 使用这个测试记录不会保存在网络中
for data in test_dataloader:
imgs, targets = data
outputs = mymodel(imgs)
# loss
loss = loss_fn(outputs, targets)
total_test_loss = total_test_loss + loss.item()
# 正确率accuracy:
# argmax为1表示横向最大的下标,为0表示纵向
# 判断输出与输入是否为同一个类别
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy = total_accuracy + accuracy
print("整体测试集上的loss:{}".format(total_test_loss))
writer.add_scalar("test_loss", total_test_loss, total_test_step)
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
writer.add_scalar("test_accuracy", total_accuracy/test_data_size, total_test_step)
total_test_step = total_test_step + 1
# 保存模型:这里利用的是第一种保存方式
torch.save(mymodel, "mymodel_{}.pth".format(i))
print("模型已保存")
writer.close()
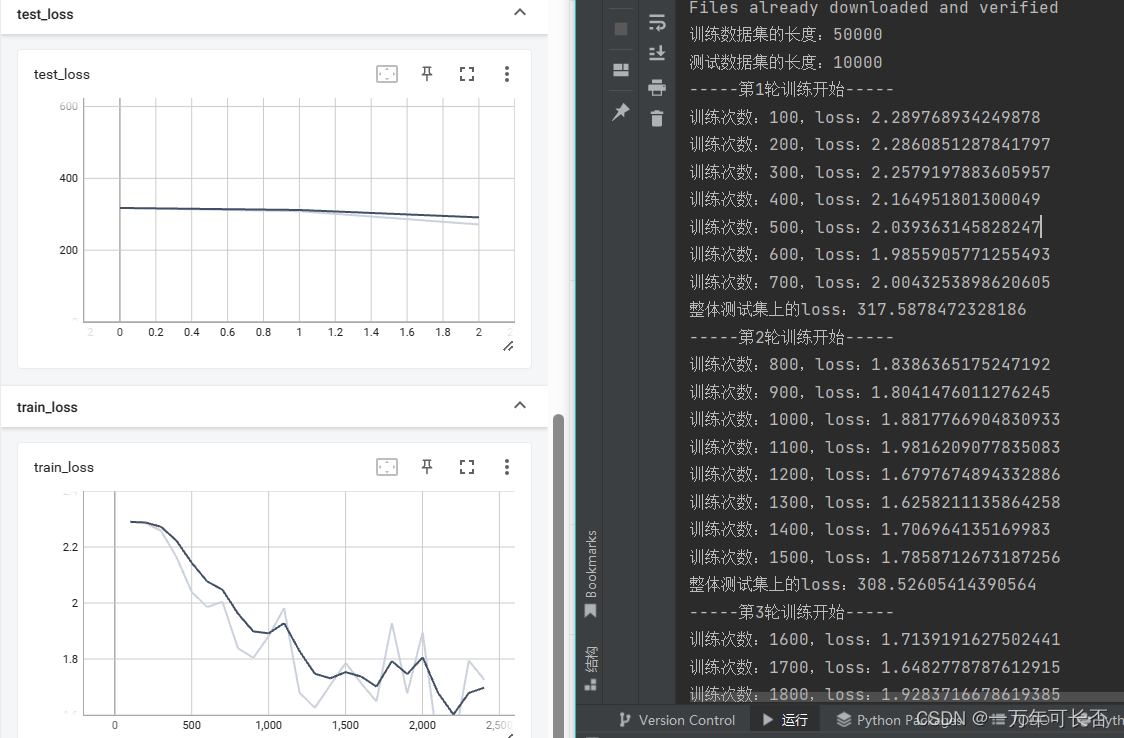
3.3 结果展示
这里可以看出随着训练的进行loss不断减小。因为训练时间过长,这里只展示测试前几轮。
四、使用GPU加速
GPU的使用:
- 第一种方式:对 网络模型、loss、数据 调用.cuda()即可
import torch
import torchvision
from torch import nn
from torch.nn import Sequential, Conv2d, MaxPool2d, Flatten, Linear
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import time
# GPU的使用:
# 第一种方式:对 网络模型、loss、数据 调用.cuda()即可
# 谷歌线上使用GPU工具:google colab,也有其他工具
# 1. 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=torchvision.transforms.ToTensor(), download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=torchvision.transforms.ToTensor(), download=True)
# 2. length长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 常用format这种方式输出训练集长度
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 3. 利用DataLoader加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 4. 搭建神经网络
class Mymodel(nn.Module):
def __init__(self):
super(Mymodel, self).__init__()
# 这里构建CIFAR 10 model结构
self.model = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64), # 64*4*4=1024
Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
mymodel = Mymodel()
if torch.cuda.is_available():
mymodel = mymodel.cuda()
# 5. 损失函数
loss_fn = nn.CrossEntropyLoss()
if torch.cuda.is_available():
loss_fn = loss_fn.cuda()
# 6. 优化器:设置学习速率为0.01
learning_rate = 1e-2
optimzer = torch.optim.SGD(mymodel.parameters(), lr=learning_rate)
# 7. 设置训练网络的一些参数:训练次数,测试次数,训练轮数
total_train_step = 0
total_test_step = 0
epoch = 10
# 添加tensorboard
writer = SummaryWriter("logs")
# 8. 开始训练
start_time = time.time()
for i in range(epoch):
print("-----第{}轮训练开始-----".format(i + 1))
# 1)训练步骤开始
mymodel.train() # 当模型中出现特殊的层时使用,比如Dropout,BatchNorm等
for data in train_dataloader:
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda()
targets = targets.cuda()
outputs = mymodel(imgs)
loss = loss_fn(outputs, targets)
# 优化器模型
optimzer.zero_grad()
loss.backward()
optimzer.step()
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
end_time = time.time()
print("所用时间:{}".format(end_time-start_time))
print("训练次数:{},loss:{}".format(total_train_step, loss.item()))
writer.add_scalar("train_loss", loss.item(), total_train_step)
# 2)测试步骤开始
mymodel.eval() # 当模型中出现特殊的层时使用,比如Dropout,BatchNorm等
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 使用这个测试记录不会保存在网络中
for data in test_dataloader:
imgs, targets = data
if torch.cuda.is_available():
imgs = imgs.cuda()
targets = targets.cuda()
outputs = mymodel(imgs)
# loss
loss = loss_fn(outputs, targets)
total_test_loss = total_test_loss + loss.item()
# 正确率accuracy:
# argmax为1表示横向最大的下标,为0表示纵向
# 判断输出与输入是否为同一个类别
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy = total_accuracy + accuracy
print("整体测试集上的loss:{}".format(total_test_loss))
writer.add_scalar("test_loss", total_test_loss, total_test_step)
print("整体测试集上的正确率:{}".format(total_accuracy/test_data_size))
writer.add_scalar("test_accuracy", total_accuracy/test_data_size, total_test_step)
total_test_step = total_test_step + 1
# 保存模型:这里利用的是第一种保存方式
torch.save(mymodel, "mymodel_{}.pth".format(i))
print("模型已保存")
writer.close()
- 第二种方式:
1)定义一个device = torch.device(“cuda”)
2)然后 网络模型、loss、数据 调用.to(device)
import torch
import torchvision
from torch import nn
from torch.nn import Sequential, Conv2d, MaxPool2d, Flatten, Linear
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
import time
# GPU的使用:
# 第二种方式:
# 1)定义一个device = torch.device("cuda")
# 2)然后 网络模型、loss、数据 调用.to(device)
# 定义GPU训练设备
device = torch.device("cuda")
# 1. 准备数据集
train_data = torchvision.datasets.CIFAR10("./dataset", train=True,
transform=torchvision.transforms.ToTensor(), download=True)
test_data = torchvision.datasets.CIFAR10("./dataset", train=False,
transform=torchvision.transforms.ToTensor(), download=True)
# 2. length长度
train_data_size = len(train_data)
test_data_size = len(test_data)
# 常用format这种方式输出训练集长度
print("训练数据集的长度:{}".format(train_data_size))
print("测试数据集的长度:{}".format(test_data_size))
# 3. 利用DataLoader加载数据集
train_dataloader = DataLoader(train_data, batch_size=64)
test_dataloader = DataLoader(test_data, batch_size=64)
# 4. 搭建神经网络
class Mymodel(nn.Module):
def __init__(self):
super(Mymodel, self).__init__()
# 这里构建CIFAR 10 model结构
self.model = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64), # 64*4*4=1024
Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
mymodel = Mymodel()
mymodel = mymodel.to(device)
# 5. 损失函数
loss_fn = nn.CrossEntropyLoss()
loss_fn = loss_fn.to(device)
# 6. 优化器:设置学习速率为0.01
learning_rate = 1e-2
optimzer = torch.optim.SGD(mymodel.parameters(), lr=learning_rate)
# 7. 设置训练网络的一些参数:训练次数,测试次数,训练轮数
total_train_step = 0
total_test_step = 0
epoch = 10
# 添加tensorboard
writer = SummaryWriter("logs")
# 8. 开始训练
start_time = time.time()
for i in range(epoch):
print("-----第{}轮训练开始-----".format(i + 1))
# 1)训练步骤开始
mymodel.train() # 当模型中出现特殊的层时使用,比如Dropout,BatchNorm等
for data in train_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = mymodel(imgs)
loss = loss_fn(outputs, targets)
# 优化器模型
optimzer.zero_grad()
loss.backward()
optimzer.step()
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
end_time = time.time()
print("所用时间:{}".format(end_time - start_time))
print("训练次数:{},loss:{}".format(total_train_step, loss.item()))
writer.add_scalar("train_loss", loss.item(), total_train_step)
# 2)测试步骤开始
mymodel.eval() # 当模型中出现特殊的层时使用,比如Dropout,BatchNorm等
total_test_loss = 0
total_accuracy = 0
with torch.no_grad(): # 使用这个测试记录不会保存在网络中
for data in test_dataloader:
imgs, targets = data
imgs = imgs.to(device)
targets = targets.to(device)
outputs = mymodel(imgs)
# loss
loss = loss_fn(outputs, targets)
total_test_loss = total_test_loss + loss.item()
# 正确率accuracy:
# argmax为1表示横向最大的下标,为0表示纵向
# 判断输出与输入是否为同一个类别
accuracy = (outputs.argmax(1) == targets).sum()
total_accuracy = total_accuracy + accuracy
print("整体测试集上的loss:{}".format(total_test_loss))
writer.add_scalar("test_loss", total_test_loss, total_test_step)
print("整体测试集上的正确率:{}".format(total_accuracy / test_data_size))
writer.add_scalar("test_accuracy", total_accuracy / test_data_size, total_test_step)
total_test_step = total_test_step + 1
# 保存模型:这里利用的是第一种保存方式
torch.save(mymodel, "mymodel_{}.pth".format(i))
print("模型已保存")
writer.close()
五、完整的模型验证(测试/demo)套路
利用已经训练好的模型给它提供输入
import torchvision
import torch
from torch import nn
from torch.nn import Sequential, Conv2d, MaxPool2d, Flatten, Linear
from PIL import Image
# 1.读取需要判断图片
image_path = "../imgs/dog.png"
image = Image.open(image_path)
# 原图像是4通道,这里需要转化成3通道
image = image.convert('RGB')
print(image)
transform = torchvision.transforms.Compose(
[torchvision.transforms.Resize((32, 32)),
torchvision.transforms.ToTensor()])
image = transform(image)
print(image.shape)
# image是[3, 32, 32]3维的,需要转化成4维的[1, 3, 32, 32]
image = torch.reshape(image, (1, 3, 32, 32))
# 2. 网络模型
class Mymodel(nn.Module):
def __init__(self):
super(Mymodel, self).__init__()
# 这里构建CIFAR 10 model结构
self.model = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64), # 64*4*4=1024
Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
# 3. 用已经训练好的模型(将cuda->cpu),进行判别
model = torch.load("mymodel_0.pth", map_location=torch.device('cpu'))
model.eval()
with torch.no_grad():
output = model(image)
print(output)
print(output.argmax(1))
根据输出,可以明显可以看出,测试错误;因为我们用的这个模型就训练了一轮,正确率不高;读者可以利用正确率高的模型
<PIL.Image.Image image mode=RGB size=456x336 at 0x266FF3CBC70>
torch.Size([3, 32, 32])
tensor([[-1.7129, -0.1896, 0.6489, 0.7595, 0.8513, 0.9252, 1.1398, 0.4540,
-2.0718, -1.0213]])
tensor([6])














 866
866











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









