






 本文介绍了夏普公司的GP2Y1014AU0F粉尘传感器,详细阐述了其工作原理、技术参数及应用场景。传感器能够检测0.7μm以上的颗粒物,并提供0.5V/(mg/m³)的灵敏度。文中还提供了基于STM32平台的传感器读取示例代码。
本文介绍了夏普公司的GP2Y1014AU0F粉尘传感器,详细阐述了其工作原理、技术参数及应用场景。传感器能够检测0.7μm以上的颗粒物,并提供0.5V/(mg/m³)的灵敏度。文中还提供了基于STM32平台的传感器读取示例代码。
GP2Y1014AU0F粉尘传感器
概述
GP2Y1014AU0F粉尘传感器是由夏普公司生产的一款光学灰尘传感器
组成
工作原理
传感器中心有一个圆形的洞,空气可以自由流过。
基本参数
重要参数
- 供电电压:5~7V
- 消耗电流:最大20mA
- 清洁空气中的电压值:0.9V
- 最小粒子检出值:0.7μm
- 灵敏度:0.5V/(mg/m³)
其他参数
- 工作温度:-10~65℃(该温度下可正常工作)
- 存储温度:-20~85℃(该温度下传感器参数不改变)
- 使用寿命:5年
- 尺寸大小:46mm×30mm×17.6mm
- 重量大小:15g
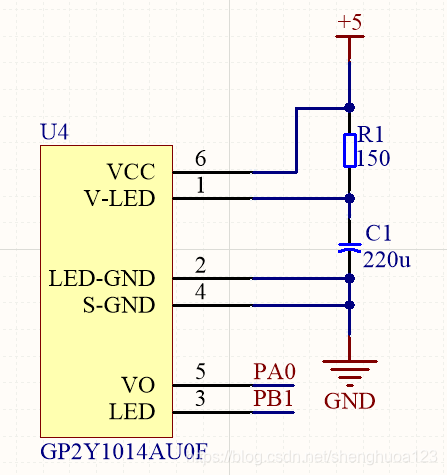
电路连接
程序设计
gp2y1014au0f.c
#include "gp2y1014au0f.h"
#include "delay.h"
/*初始化ADC*/
void Adc_Init(void)
{
ADC_InitTypeDef ADC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB |RCC_APB2Periph_ADC1 , ENABLE ); //使能ADC1通道时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置ADC分频因子6 72M/6=12,ADC最大时间不能超过14M
//PA1 作为模拟通道输入引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入引脚
GPIO_Init(GPIOA, &GPIO_InitStructure);
//PB1 作为脉冲输出引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GP2Y_High;
ADC_DeInit(ADC1); //复位ADC1,将外设 ADC1 的全部寄存器重设为缺省值
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //模数转换工作在单通道模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //模数转换工作在单次转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //转换由软件而不是外部触发启动
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进行规则转换的ADC通道的数目
ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1
ADC_ResetCalibration(ADC1); //使能复位校准
while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束
ADC_StartCalibration(ADC1); //开启AD校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束
// ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
}
//获得ADC值
//ch:通道值 0~3
u16 Get_Adc(u8 ch)
{
//设置指定ADC的规则组通道,一个序列,采样时间
ADC_RegularChannelConfig(ADC1, ch, 0, ADC_SampleTime_239Cycles5 ); //ADC1,ADC通道,采样时间为239.5周期
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的ADC1的软件转换启动功能
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));//等待转换结束
return ADC_GetConversionValue(ADC1); //返回最近一次ADC1规则组的转换结果
}
float GetGP2Y(void)
{
u32 AD_PM;
double pm;
GP2Y_Low;
delay_us(280);
AD_PM = Get_Adc(ADC_Channel_0); //PA0
delay_us(40);
GP2Y_High;
delay_us(9680);
pm = 0.17*AD_PM-0.1; //转换公式
//printf("%f\n",pm);
return pm;
}
u16 Get_GP2Y_Average(u8 times)
{
u32 pm_val=0;
u8 t;
for(t=0;t<times;t++)
{
pm_val+=GetGP2Y();
delay_ms(5);
}
return pm_val/times;
}
gp2y1014au0f.h
#ifndef __GP2Y1014AU0F_H
#define __GP2Y1014AU0F_H
#include "sys.h"
#define GP2Y_High GPIO_SetBits(GPIOB,GPIO_Pin_1);
#define GP2Y_Low GPIO_ResetBits(GPIOB,GPIO_Pin_1);
float GetGP2Y(void);
void Adc_Init(void);
u16 Get_Adc(u8 ch);
u16 Get_GP2Y_Average(u8 times);
#endif

















 8353
8353

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









