





 本文详细介绍了一项关于六旋翼无人机的研究,通过综合分析国内外现状,探讨了关键配件如机架、电机、电调、电池、飞控和遥控器的选择。研究从结构形式、工作原理出发,深入剖析了每个组件的重要性,并针对不同要求进行了优化配置。
本文详细介绍了一项关于六旋翼无人机的研究,通过综合分析国内外现状,探讨了关键配件如机架、电机、电调、电池、飞控和遥控器的选择。研究从结构形式、工作原理出发,深入剖析了每个组件的重要性,并针对不同要求进行了优化配置。
目 录
1 概论 1
1.2 国内外研究现状 1
1.3 主要研究内容 1
2六旋翼无人飞行器的结构分析与选择 3
2.1结构形式 3
2.2工作原理 3
2.3机架及桨叶的选择 4
2.3.1 单个桨叶空气动力分析及桨叶的选择 4
2.3.2材料的选择 6
2.3.3机架结构分析与优化 6
3电机 7
3.1电机的分类与介绍 7
3.2电机参数简介与选择 7
4电调 9
4.1电调的选择 9
5电池 10
5.1电池选择 10
6飞行控制器 12
6.1飞行姿态模型分析 12
6.2飞控调试 16
6.3飞行模式配置 17
7遥控设备 18
7.1遥控器的选择 19
参考文献 21
致 谢 22
1.3 主要研究内容
主要内容是在四旋翼无人飞行器相关技术的基础上进行研究和分析,选择出最佳的配件来组装一架六旋翼无人飞行器并进行优化,将从无人飞行器的机架、飞行控制器、电机、电调、电池、遥控装置等几个主要配件进行分析优化,选出最佳的配件来组装一架六旋翼无人飞行器。从几个不同方面对四轴飞行器做的全面的研究,具体内容将通过六个章节进行描述,各章的主要内容如下:
第一章:重点介绍六旋翼无人飞行器的发展历程和国内外发展现状,分析了六旋翼无人飞行器的研究意义。
第二章:首先对六旋翼无人飞行器的机架结构进行了介绍,然后对六旋翼飞行器的原理进行了介绍以及飞行姿态的介绍,最后是根据工作的要求对六旋翼无人飞行器的机架进行分析和选择。
第三章:首先对有刷电机、无刷的种类进行介绍,然后对电机的选择进行分析,最后根据六旋翼无人飞行器的运载要求选择合适的电机。
第四章:首先对有刷电调、无刷电调的工作原理进行介绍,然后对电机的选择进行分析,最后根据六旋翼无人飞行器的电机载荷要求选择最佳的电调。
第五章:首先对各种充电电池的各种特征进行介绍,然后解析锂聚合物电池的各项参数和性能,最后根据六旋翼无人飞行器的工作要求选择最佳电池作为飞行器的工作电源。
第六章:首先对APM飞行控制器进行介绍,然后根据飞行姿态的模型表示,使地面软件对APM飞行控制器进行调试,最后解释APM飞行控制下可编辑的几种飞行模式。
第七章:首先对遥控器常用信号进行介绍,然后对遥控器的种类进行介绍分析,最后根据飞行半径的要求选出合适的遥控器。
第八章:首先对六旋翼无人飞行器的配件选择进行总结,然后对所存在的不足进行阐述,最后对六旋翼无人飞行器存在的一些不足假设出相应的弥补措施。
2六旋翼无人飞行器的结构分析与选择
2.1结构形式
六旋翼无人飞行器通常采用六个旋翼作为飞行器的动力源。六个旋翼处于同一高度平面。相邻两旋翼,一个逆时针旋转,一个顺时针旋转,六个电机对称的安装在飞行器的支架末端,且对角线上相对的两旋翼旋向相反[6]。支架中间的工作台上层安放信号接送机、GPS定位系统,中间层安放飞行控制计算器、电流电调集成板。下层安放飞行器锂电池,以及航拍所需要的云台、相机及图形传送系统[7]。六旋翼最大的优点在于升级空间广阔,不仅可以运载摄像头,还可以卸载摄像头后在工作台下层按照其他设备,例如农药喷洒器、种子播撒器等等。六旋翼无人飞行器的结构形式见图2-1。
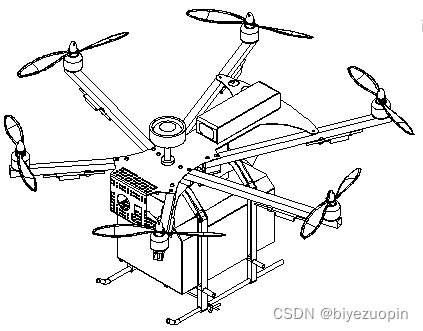
图2-1 机架图
2.2工作原理
六旋翼无人飞行器通常是由飞行控制器控制六个电机转速的变化来实现升力的变化,从而控制飞行器。一个飞行器姿态包括仰飞, 翻滚和偏航,不管是固定翼还是旋翼飞行器,都必须要实现这三种基本控制[8]。旋翼还有悬停特殊飞行姿态,因此对于六旋翼无人飞行器,它通过对六个电机旋转的速度和力矩、方向的所产生差值来满足以上飞行姿态。对于这个操作而言,六旋翼无人飞行器只有完全平衡才能满足这些要求,当六个旋翼的重量和大小完全一致,桨工作时会产生作用力和反作用力。机架要让桨旋转,桨也会给机架一个大小相等,方向相反的扭力。如果不能相互抵消这个扭力,机身就会因此而旋转。如果正桨反桨旋转转方向刚好相反,则正好抵消扭力。单旋翼的传统直升机,就需要配一个产生侧向推力的尾旋翼来抵消这个扭力[9]。所以最优化的设计就是三个正桨正向旋转,三个反桨反向旋转,这样也能降低设计工作量及复杂度。













六旋翼无人机(飞行器)设计(lunwen+任务书+开题+文综+翻译及原文+cad图纸)

于 2022-11-10 10:12:56 首次发布



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











