







SDK提供主动获取图像的接口,用户可以在开启取流后直接调用此接口获取图像,也可以使用异步方式(线程、定时器等)获取图像。
主动获取图像有两种方式:
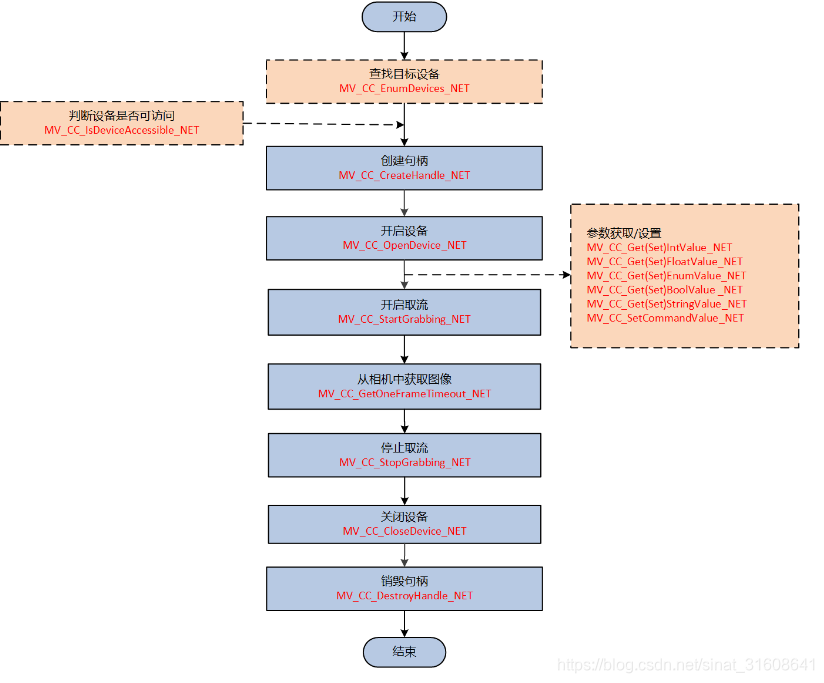
方式一:调用 MV_CC_StartGrabbing_NET() 开始采集,需要自己开启一个buffer,然后在应用层循环调用 MV_CC_GetOneFrameTimeout_NET() 获取指定像素格式的帧数据,获取帧数据时上层应用程序需要根据帧率控制好调用该接口的频率。
方式二:调用 MV_CC_StartGrabbing_NET() 开始采集,然后在应用层调用 MV_CC_GetImageBuffer_NET() 获取指定像素格式的帧数据,然后调用 MV_CC_FreeImageBuffer_NET() 释放buffer,获取帧数据时上层应用程序需要根据帧率控制好调用该接口的频率。
注意:
a、两种主动取图方式不能同时使用,且不能与后面的回调取图方式同时使用,三种取图方式只能使用其中一种。
b、Pdata返回的是一个地址指针,建议将Pdata里面的数据copy出来另建线程使用。
主动取图方式使用的场景:
主动取图方式需要先调用 MV_CC_StartGrabbing_NET() 启动图像采集。上层应用程序需要根据帧率,控制好调用主动取图接口的频率。两种主动取图方式都支持设置超时时间,SDK内部等待直到有数据时返回,可以增加取流平稳性,适合用于对平稳性要求较高的场合。
流程图
实例
Thread线程函数
public void ReceiveThreadProcess()
{
MyCamera.MVCC_INTVALUE stParam = new MyCamera.MVCC_INTVALUE();
int nRet = m_MyCamera.MV_CC_GetIntValue_NET("PayloadSize", ref stParam);
if (MyCamera.MV_OK != nRet)
{
ShowErrorMsg("Get PayloadSize failed", nRet);
return;
}
UInt32 nPayloadSize = stParam.nCurValue;
if (nPayloadSize > m_nBufSizeForDriver)
{
if (m_BufForDriver != IntPtr.Zero)
{
Marshal.Release(m_BufForDriver);
}
m_nBufSizeForDriver = nPayloadSize;
m_BufForDriver = Marshal.AllocHGlobal((Int32)m_nBufSizeForDriver);
}
if (m_BufForDriver == IntPtr.Zero)
{
return;
}
MyCamera.MV_FRAME_OUT_INFO_EX stFrameInfo = new MyCamera.MV_FRAME_OUT_INFO_EX();
MyCamera.MV_DISPLAY_FRAME_INFO stDisplayInfo = new MyCamera.MV_DISPLAY_FRAME_INFO();
while (m_bGrabbing)
{
lock (BufForDriverLock)
{
nRet = m_MyCamera.MV_CC_GetOneFrameTimeout_NET(m_BufForDriver, nPayloadSize, ref stFrameInfo, 1000);
if (nRet == MyCamera.MV_OK)
{
m_stFrameInfo = stFrameInfo;
}
}
if (nRet == MyCamera.MV_OK)
{
if (RemoveCustomPixelFormats(stFrameInfo.enPixelType))
{
continue;
}
stDisplayInfo.hWnd = pictureBox1.Handle;
stDisplayInfo.pData = m_BufForDriver;
stDisplayInfo.nDataLen = stFrameInfo.nFrameLen;
stDisplayInfo.nWidth = stFrameInfo.nWidth;
stDisplayInfo.nHeight = stFrameInfo.nHeight;
stDisplayInfo.enPixelType = stFrameInfo.enPixelType;
m_MyCamera.MV_CC_DisplayOneFrame_NET(ref stDisplayInfo);
}
else
{
if (bnTriggerMode.Checked)
{
Thread.Sleep(5);
}
}
}
}














 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









