







 本文详细指导如何在启智社区中使用ATC对模型进行转换,包括配置昇腾NPU资源、通过c2net库操作、执行Yolov5s示例,以及如何在云脑NPU环境下完成调试任务和资源管理。
本文详细指导如何在启智社区中使用ATC对模型进行转换,包括配置昇腾NPU资源、通过c2net库操作、执行Yolov5s示例,以及如何在云脑NPU环境下完成调试任务和资源管理。
快速使用 ATC
本文将详细介绍如何借助启智社区昇腾算力 910/910B 进行模型转换,彻底告别开发板上模型转换各种报错的痛苦。
TODO:
- 完成数据集、模型存储教程
- 完成训练&模型转换教程
- 完成 ATC 其他功能教程
Fork 仓库
- 打开仓库
- 点击右上角的
派生按钮
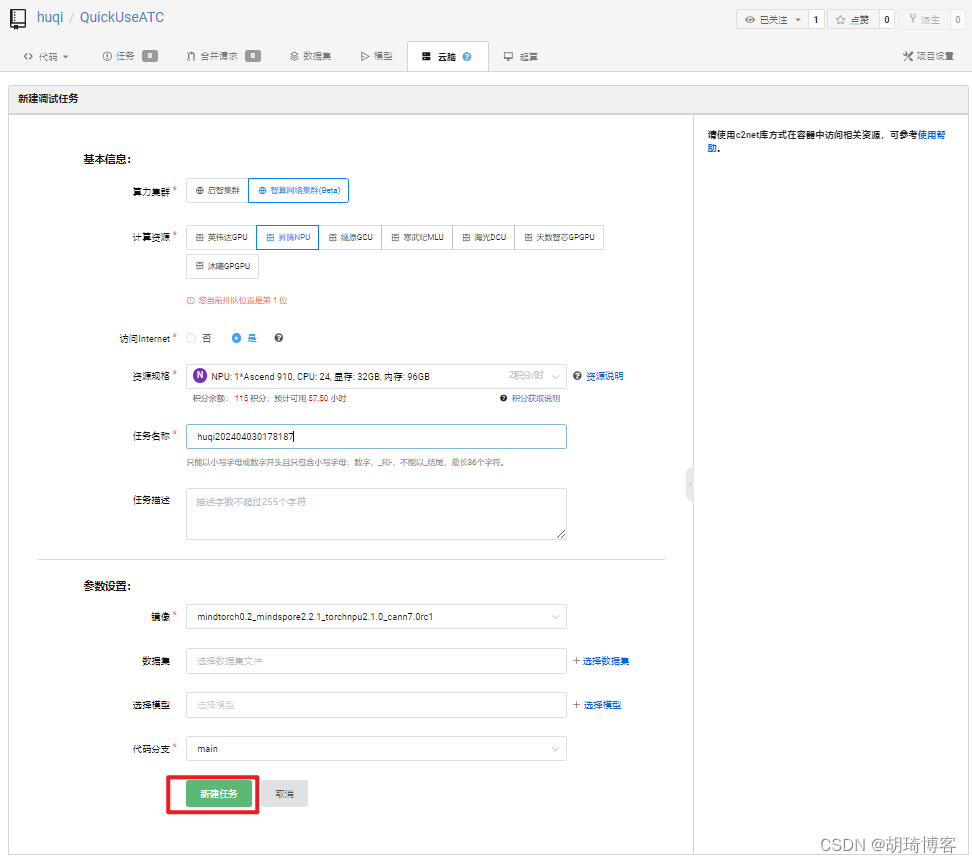
创建云脑 NPU 调试任务
- 点击
云脑-新建调试任务

- 配置算力资源及镜像
- 算力集群:
智算网络集群(Beta) - 计算资源:
昇腾NPU - 访问Interne:
是 - 资源规格:
NPU: 1*Ascend-D910B, CPU: 20, 显存: 32GB, 内存: 60GB - 任务名称&任务描述: 按需自定义
- 镜像:
mindtorch0.2_mindspore2.2.1_torchnpu2.1.0_cann7.0rc1 - 数据集: 按需选择
- 选择模型: 按需选择
- 代码分支:
main
- 点击
新建任务创建调试任务
外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传
更多细节请参考云脑调试任务
使用 ATC 进行模型转换
本仓库以
yolov5s为例,介绍如何使用 ATC 进行模型转换。
- 先点击
云脑-调试任务-调试打开开发环境
- 打开 notebook
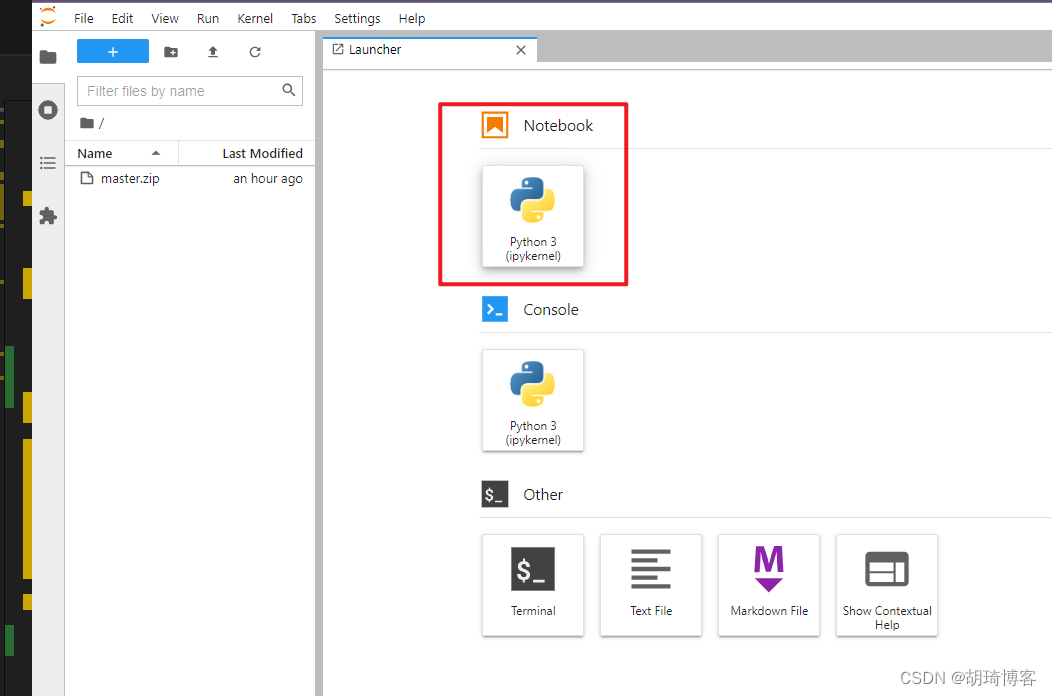
- 写入代码并运行
# 通过c2net库方式获取模型、数据集和输出路径
# 安装 c2net
!pip install -U c2net
# 导入包
from c2net.context import prepare, upload_output
# 初始化导入数据集和预训练模型到容器内
c2net_context = prepare()
# 获取代码路径,数据集路径,预训练模型路径,输出路径
code_path = c2net_context.code_path + "/" + "QuickUseATC".lower()
dataset_path = c2net_context.dataset_path
pretrain_model_path = c2net_context.pretrain_model_path
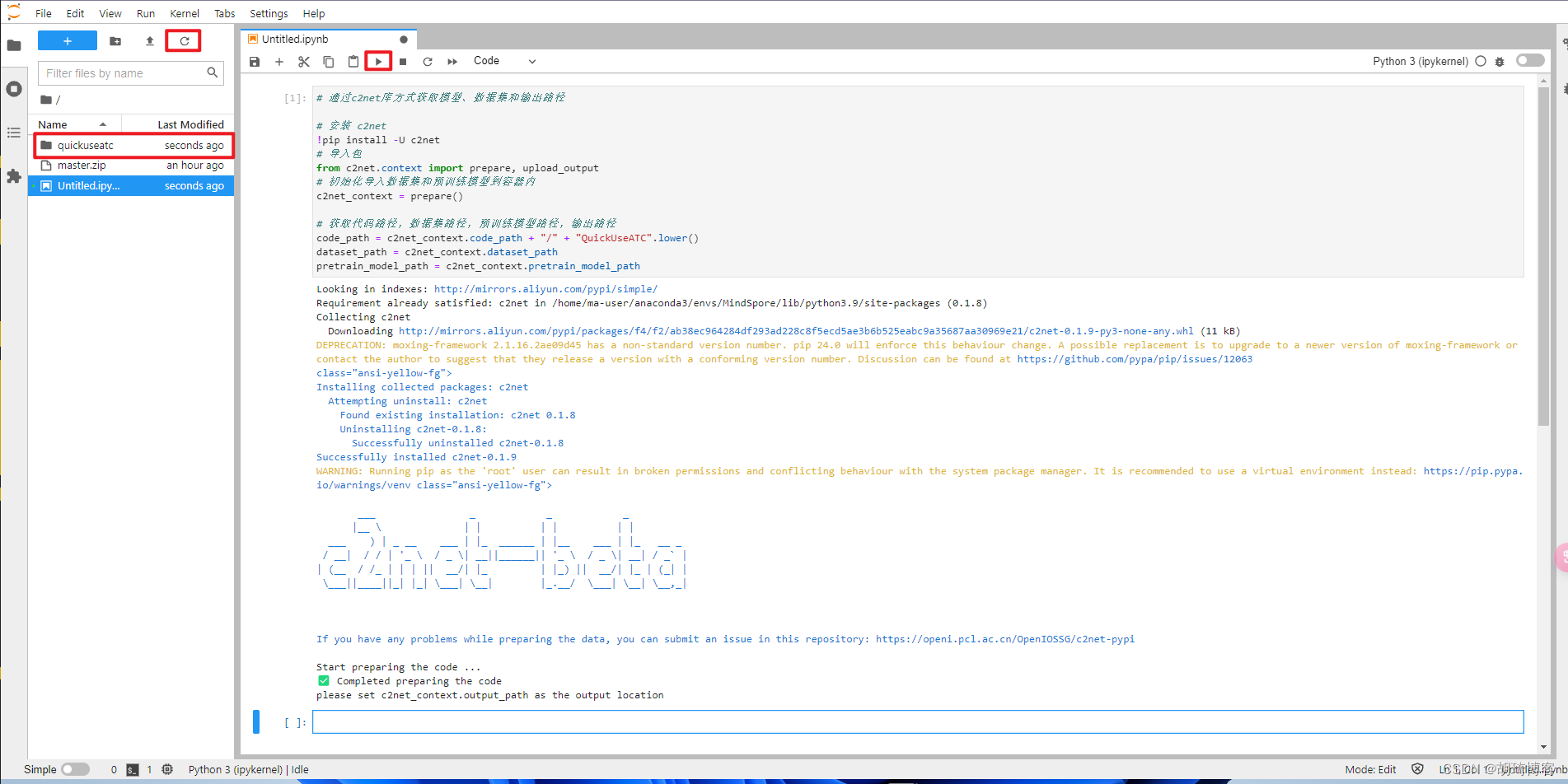
接着就能看到 quickuseatc 目录,可点击运行 main.ipynb 体验 ATC 模型转换
- 最终我们可以把转换好的模型拷贝到工作空间进行下载
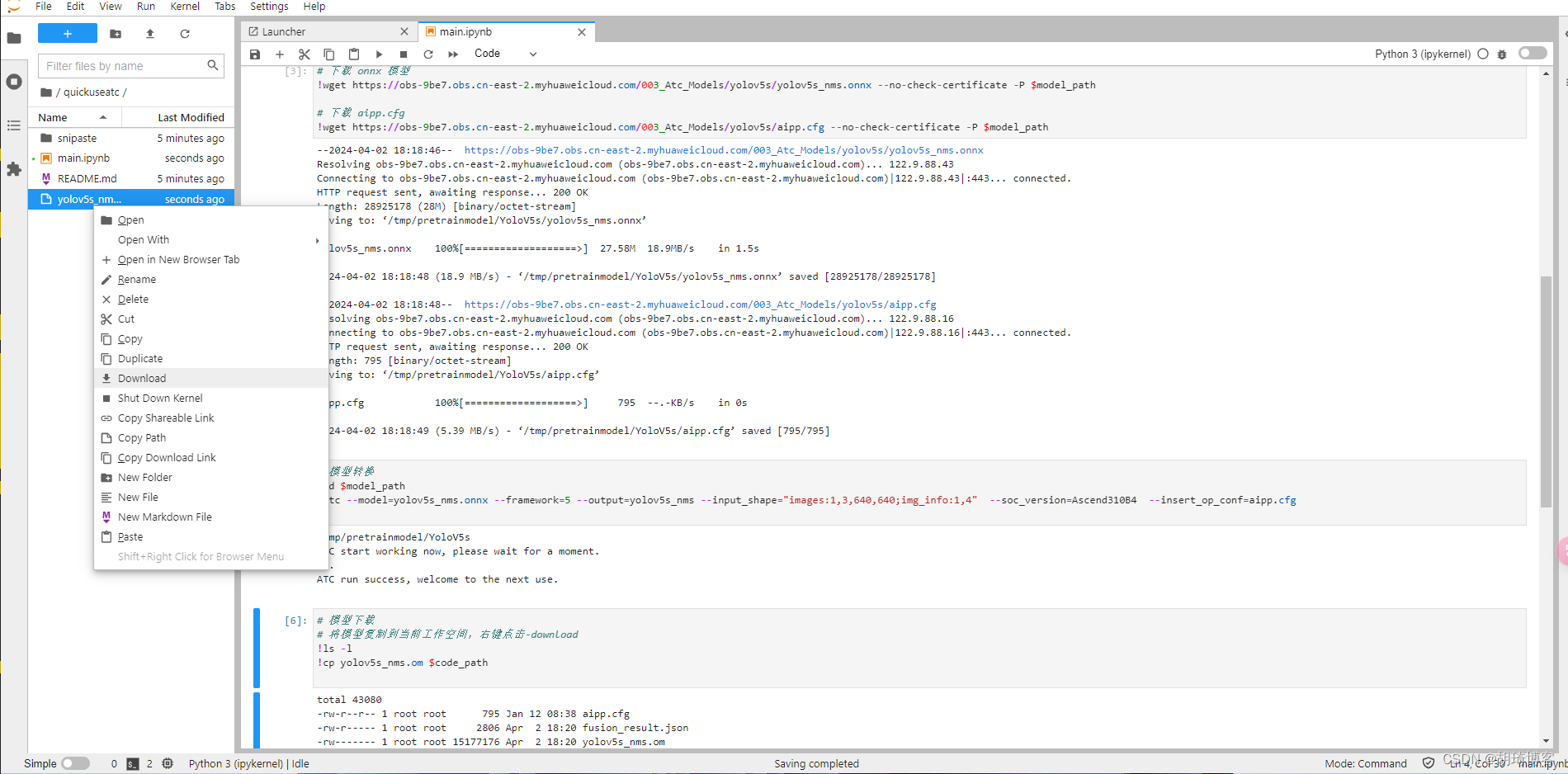
- 当然最后别忘了停止调试,否则算力资源会被白白浪费掉哦

后记
如果本文有不当之处,欢迎指正。感谢!

















 233
233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









