






之前说过,上位机控制硬件都是通过发送指令进行的,这是单向的。那么反过来,下位机硬件给上位机发送指令怎么才能实现呢?对于PMAC来说,最常见的情况就是,当PMAC一次运动完成时通知当前PC程序运动已完成。
1.下位机通知上位机原理
如下图所示,
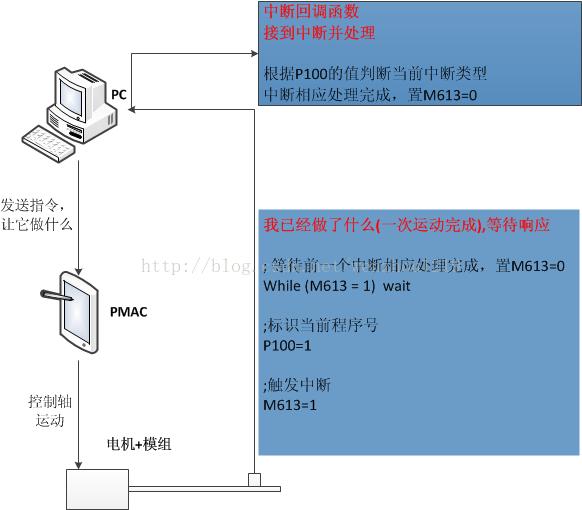
PC给PMAC发送指令控制它做什么,当运动程序完成后中断通知上位机,在中断的同时发送一个标识P100表明完成的程序号,这个标明到底是1号轴运动完,还是是2号轴运动完。在PC端有一个中断回调函数,下位机发送中断后,会自动跳转到该函数中,中断函数接受中断,根据标识P100来决定不同的情况不同的处理。
通俗来说,就是如下流程:
- PC->PMAC:发送指令,告诉它做什么 (&1b40r)
- PMAC:做完了,等待PC处理完前一个通知 (While (M613 = 1) wait)
- PMAC->PC:某某事做完了,PC你就看着处理吧 (P100=1 M613=1)
- PC:针对PMAC通知的事判断属于什么类型并处理 (根据P100判断)
- PC->PMAC:处理完了,下位机可以发下一个通知消息了 (P100=0 M613=0)
如上图所示,M613这个是用硬件跳线配置的,指定当前中断响应通道,具体的设置在这里。P100是我们指定的上下位机通信变量,这个是自己定义的,也可以是P1/P2/P3等。
2.下位机代码
- &1
- CLOSE ;确认所有缓冲区被关闭
- OPEN PROG 40
- CLEAR
- TA(200)
- TS(20)
- F(30)
- INC
- Linear
- X(10) Y(40)
- dwell 0
- ;中断发送程序段
- While (M613 = 1) wait ;等待上一次中断响应处理完成
- P100=1 ;标明当前完成的程序,可为0、1、2等自定义的值
- M613=1 ;向上位机发送中断
- CLOSE
3.上位机处理代码
注册中断处理函数:
- BOOL CInterruptDlg::ConnectPmac()
- {
- //链接Pcomm32.dll函数库,注意引入myRuntimeLink头文件
- if (NULL == PmacRuntimeLink(PMAC_NUM))
- {
- AfxMessageBox(TEXT("链接Pcomm32.dll函数库和打开PMAC卡连接失败!"));
- return m_bIsConnect = FALSE;
- }
- //中断函数绑定
- if( FALSE == PmacINTRFuncCallInit(PMAC_NUM, InterruptFunc2, 0, 0xFF1F))
- {
- AfxMessageBox(TEXT("PMAC函数中断初始化失败"));
- return m_bIsConnect = FALSE;
- }
- return m_bIsConnect = TRUE;
- }
对应的中断函数处理如下:
- //中断处理
- void WINAPI InterruptFunc2(DWORD msg, PINTRBUFFER pBuffer)
- {
- extern CInterruptApp theApp;
- TCHAR szRes[MAX_PATH];
- TCHAR szCmd[MAX_PATH];
- if (pBuffer->dwInterruptType == ISR_IR6)
- {
- if (1 == PmacGetVariable(PMAC_NUM, 'P', 100, 0))
- {
- AfxMessageBox(TEXT("处理完成!"));
- //重置中断
- lstrcpy(szCmd, "M613=0 P100=0");
- PmacGetResponse(0,szRes,MAX_PATH,szCmd);
- }
- }
- }
演示程序源代码下载地址,在该程序中点击电机开始回零后,回零按钮灰度化。直到下位机完成回零发送中断给上位机程序,上位机程序判断后处理使能按钮。这个程序是最简单的中断处理程序,主要是为了阐明原理,再复杂的程序都和这个原理一样的,基于这个原理我们可以开发更复杂的上下位机交互程序。
注意这里不能用默认安装完成后的runtime.h,原本的我试过有问题,必须用我放在程序源文件夹里的重写myRuntime.h。
更多PMAC代码参见我的网站,基本上都是这个系列涉及到的知识点。
到此为止,PMAC的使用系列基本上写完了,看完这一个系列,基本的PMAC编程和调试应该没有问题了,剩下的就是Read The Fuck Manual了。















 3641
3641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









