









本文介绍Ceph客户端方面的某些模块的实现。客户端主要是实现了接口,对外提供访问的功能。上层可以通过接口来访问Ceph存储。Librados 与 Osdc 位于Ceph客户端中比较底层的位置,Librados 提供了Pool的创建、删除、对象的创建、删除等基本接口;Osdc则用于封装操作,计算对象的地址,发送请求和处理超时。如图:
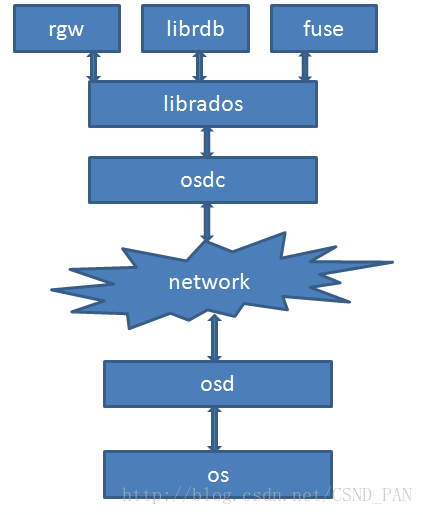
根据LIBRADOS架构图,叙述大概的事件流程。在 Ceph分布式存储实战中 这本书中有如下一段话:
先根据配置文件调用LIBRADOS创建一个RADOS,接下来为这个RADOS创建一个radosclient,radosclient包含3个主要模块(finisher、Message、Objector)。再根据pool创建对应的ioctx,在ioctx中能够找到radosclient。在调用OSDC生成对应的OSD请求,与OSD进行通信响应请求。这从大体上叙述了librados与osdc在整个Ceph中的作用。
Librados
该模块包含两个部分,分别是RadosClient 模块和IoctxImpl。RadosClient处于最上层,是librados的核心管理类,管理着整个RADOS系统层面以及pool层面的管理。而IoctxImpl则对于其中的某一个pool进行管理,如对 对象的读写等操作的控制。
RadosClient(Librados模块)
IoctxImpl(Librados模块)
Objecter(Osdc 模块)
RadosClient类
class librados::RadosClient : public Dispatcher,
public md_config_obs_t
{
friend neorados::detail::RadosClient;
public:
using Dispatcher::cct;
private:
std::unique_ptr<CephContext,
std::function<void(CephContext*)>> cct_deleter;
public:
const ConfigProxy& conf{cct->_conf};
ceph::async::io_context_pool poolctx;
private:
enum {
DISCONNECTED,
CONNECTING,
CONNECTED,
} state{DISCONNECTED};
MonClient monclient{cct, poolctx};
MgrClient mgrclient{cct, nullptr, &monclient.monmap};
Messenger *messenger{nullptr}; //网络消息接口
uint64_t instance_id{0};
bool _dispatch(Message *m); //相关消息分发 Dispatcher类的函数重写
bool ms_dispatch(Message *m) override;
void ms_handle_connect(Connection *con) override;
bool ms_handle_reset(Connection *con) override;
void ms_handle_remote_reset(Connection *con) override;
bool ms_handle_refused(Connection *con) override;
Objecter *objecter{nullptr};// Osdc模块中的 用于发送封装好的OP消息
ceph::mutex lock = ceph::make_mutex("librados::RadosClient::lock");
ceph::condition_variable cond;
int refcnt{1};
version_t log_last_version{0};
rados_log_callback_t log_cb{nullptr};
rados_log_callback2_t log_cb2{nullptr};
void *log_cb_arg{nullptr};
std::string log_watch;
bool service_daemon = false;
std::string daemon_name, service_name;
std::map<std::string,std::string> daemon_metadata;
ceph::timespan rados_mon_op_timeout{};
int wait_for_osdmap();
public:
boost::asio::io_context::strand finish_strand{poolctx.get_io_context()};
explicit RadosClient(CephContext *cct);
~RadosClient() override;
int ping_monitor(std::string mon_id, std::string *result);
int connect();
void shutdown();
int watch_flush();
int async_watch_flush(AioCompletionImpl *c);
uint64_t get_instance_id();
int get_min_compatible_osd(int8_t* require_osd_release);
int get_min_compatible_client(int8_t* min_compat_client,
int8_t* require_min_compat_client);
int wait_for_latest_osdmap();
int create_ioctx(const char *name, IoCtxImpl **io);
int create_ioctx(int64_t, IoCtxImpl **io);
int get_fsid(std::string *s);
int64_t lookup_pool(const char *name);
bool pool_requires_alignment(int64_t pool_id);
int pool_requires_alignment2(int64_t pool_id, bool *requires);
uint64_t pool_required_alignment(int64_t pool_id);
int pool_required_alignment2(int64_t pool_id, uint64_t *alignment);
int pool_get_name(uint64_t pool_id, std::string *name,
bool wait_latest_map = false);
int pool_list(std::list<std::pair<int64_t, std::string> >& ls);
int get_pool_stats(std::list<std::string>& ls, std::map<std::string,::pool_stat_t> *result,
bool *per_pool);
int get_fs_stats(ceph_statfs& result);
bool get_pool_is_selfmanaged_snaps_mode(const std::string& pool);
/*
-1 was set as the default value and monitor will pickup the right crush rule with below order:
a) osd pool default crush replicated rule
b) the first rule
c) error out if no value find
*/
int pool_create(std::string& name, int16_t crush_rule=-1);
int pool_create_async(std::string& name, PoolAsyncCompletionImpl *c,
int16_t crush_rule=-1);
int pool_get_base_tier(int64_t pool_id, int64_t* base_tier);
int pool_delete(const char *name);
int pool_delete_async(const char *name, PoolAsyncCompletionImpl *c);
int blocklist_add(const std::string& client_address, uint32_t expire_seconds);
int mon_command(const std::vector<std::string>& cmd, const bufferlist &inbl,
bufferlist *outbl, std::string *outs);
void mon_command_async(const std::vector<std::string>& cmd, const bufferlist &inbl,
bufferlist *outbl, std::string *outs, Context *on_finish);
int mon_command(int rank,
const std::vector<std::string>& cmd, const bufferlist &inbl,
bufferlist *outbl, std::string *outs);
int mon_command(std::string name,
const std::vector<std::string>& cmd, const bufferlist &inbl,
bufferlist *outbl, std::string *outs);
int mgr_command(const std::vector<std::string>& cmd, const bufferlist &inbl,
bufferlist *outbl, std::string *outs);
int mgr_command(
const std::string& name,
const std::vector<std::string>& cmd, const bufferlist &inbl,
bufferlist *outbl, std::string *outs);
int osd_command(int osd, std::vector<std::string>& cmd, const bufferlist& inbl,
bufferlist *poutbl, std::string *prs);
int pg_command(pg_t pgid, std::vector<std::string>& cmd, const bufferlist& inbl,
bufferlist *poutbl, std::string *prs);
void handle_log(MLog *m);
int monitor_log(const std::string& level, rados_log_callback_t cb,
rados_log_callback2_t cb2, void *arg);
void get();
bool put();
void blocklist_self(bool set);
std::string get_addrs() const;
int service_daemon_register(
const std::string& service, ///< service name (e.g., 'rgw')
const std::string& name, ///< daemon name (e.g., 'gwfoo')
const std::map<std::string,std::string>& metadata); ///< static metadata about daemon
int service_daemon_update_status(
std::map<std::string,std::string>&& status);
mon_feature_t get_required_monitor_features() const;
int get_inconsistent_pgs(int64_t pool_id, std::vector<std::string>* pgs);
const char** get_tracked_conf_keys() const override;
void handle_conf_change(const ConfigProxy& conf,
const std::set <std::string> &changed) override;
};
IoctxImpl类
该类是pool的上下文信息,一个pool对应一个IoctxImpl对象。librados中所有关于IO操作的API都设计在librados::IoCtx中,接口的真正实现在IoCtxImpl中。它的处理过程如下:
1)把请求封装成ObjectOperation 类(osdc 中的)
2)把相关的pool信息添加到里面,封装成Objecter::Op对像
3)调用相应的函数 objecter- >op_submit 发送给相应的OSD
4)操作完成后,调用相应的回调函数。
OSDC
该模块是客户端模块比较底层的,模块,用于封装操作数据,计算对象的地址、发送请求和处理超时。
客户端读写操作分析
librados::IoCtxImpl::write
librados::IoCtxImpl::operate
Objecter::prepare_mutate_op
Objecter::op_submit
Objecter::_op_submit_with_budget
Objecter::_op_submit
Objecter::_calc_target
Objecter::_get_session
Objecter::_send_op
注:
prepare_mutate_op:
调用objecter->prepare_mutate_op把ObjectOperation封装为Op类型
op_submit:
该函数将封装好的Op操作通过网络发送出去。在op_submit中调用了_op_submit_with_budget用来处理Throttle相关的流量信息以及超时处理,最后该函数调用 _op_submit用来完成关键地址寻址和发送工作。
_calc_target:
调用_calc_target 来计算目标OSD
_get_session:
调用函数 _get_session 获取目标OSD的连接,如果返回-EAGAIN,就升级为写锁,重新获取
write
写操作消息封装
int librados::IoCtxImpl::write(const object_t& oid, bufferlist& bl,
size_t len, uint64_t off)
{
if (len > UINT_MAX/2)
return -E2BIG;
::ObjectOperation op;
prepare_assert_ops(&op);
bufferlist mybl;
mybl.substr_of(bl, 0, len);
op.write(off, mybl);
return operate(oid, &op, NULL); //调用operate处理
}
operate
int librados::IoCtxImpl::operate(const object_t& oid, ::ObjectOperation *o,
ceph::real_time *pmtime, int flags)
{
ceph::real_time ut = (pmtime ? *pmtime :
ceph::real_clock::now());
/* can't write to a snapshot */
if (snap_seq != CEPH_NOSNAP)
return -EROFS;
if (!o->size())
return 0;
ceph::mutex mylock = ceph::make_mutex("IoCtxImpl::operate::mylock");
ceph::condition_variable cond;
bool done;
int r;
version_t ver;
Context *oncommit = new C_SafeCond(mylock, cond, &done, &r);
int op = o->ops[0].op.op;
ldout(client->cct, 10) << ceph_osd_op_name(op) << " oid=" << oid
<< " nspace=" << oloc.nspace << dendl;
Objecter::Op *objecter_op = objecter->prepare_mutate_op(
oid, oloc,
*o, snapc, ut,
flags | extra_op_flags,
oncommit, &ver);
objecter->op_submit(objecter_op);
{
std::unique_lock l{mylock};
cond.wait(l, [&done] { return done;});
}
ldout(client->cct, 10) << "Objecter returned from "
<< ceph_osd_op_name(op) << " r=" << r << dendl;
set_sync_op_version(ver);
return r;
}
prepare_mutate_op
调用objecter->prepare_mutate_op把ObjectOperation封装为Op类型
Op *prepare_mutate_op(
const object_t& oid, const object_locator_t& oloc,
ObjectOperation& op, const SnapContext& snapc,
ceph::real_time mtime, int flags,
Context *oncommit, version_t *objver = NULL,
osd_reqid_t reqid = osd_reqid_t(),
ZTracer::Trace *parent_trace = nullptr) {
Op *o = new Op(oid, oloc, std::move(op.ops), flags | global_op_flags |
CEPH_OSD_FLAG_WRITE, oncommit, objver,
nullptr, parent_trace);
o->priority = op.priority;
o->mtime = mtime;
o->snapc = snapc;
o->out_rval.swap(op.out_rval);
o->out_bl.swap(op.out_bl);
o->out_handler.swap(op.out_handler);
o->out_ec.swap(op.out_ec);
o->reqid = reqid;
op.clear();
return o;
}
op_submit
该函数将封装好的Op操作通过网络发送出去。在op_submit中调用了_op_submit_with_budget用来处理Throttle相关的流量信息以及超时处理,最后该函数调用 _op_submit用来完成关键地址寻址和发送工作。
void Objecter::op_submit(Op *op, ceph_tid_t *ptid, int *ctx_budget)
{
shunique_lock rl(rwlock, ceph::acquire_shared);
ceph_tid_t tid = 0;
if (!ptid)
ptid = &tid;
op->trace.event("op submit");
_op_submit_with_budget(op, rl, ptid, ctx_budget);
}
void Objecter::_op_submit_with_budget(Op *op,
shunique_lock<ceph::shared_mutex>& sul,
ceph_tid_t *ptid,
int *ctx_budget)
{
ceph_assert(initialized);
ceph_assert(op->ops.size() == op->out_bl.size());
ceph_assert(op->ops.size() == op->out_rval.size());
ceph_assert(op->ops.size() == op->out_handler.size());
// throttle. before we look at any state, because
// _take_op_budget() may drop our lock while it blocks.
if (!op->ctx_budgeted || (ctx_budget && (*ctx_budget == -1))) {
int op_budget = _take_op_budget(op, sul);
// take and pass out the budget for the first OP
// in the context session
if (ctx_budget && (*ctx_budget == -1)) {
*ctx_budget = op_budget;
}
}
if (osd_timeout > timespan(0)) {
if (op->tid == 0)
op->tid = ++last_tid;
auto tid = op->tid;
op->ontimeout = timer.add_event(osd_timeout,
[this, tid]() {
op_cancel(tid, -ETIMEDOUT); });
}
_op_submit(op, sul, ptid);
}
void Objecter::_op_submit(Op *op, shunique_lock<ceph::shared_mutex>& sul, ceph_tid_t *ptid)
{
// rwlock is locked
ldout(cct, 10) << __func__ << " op " << op << dendl;
// pick target
ceph_assert(op->session == NULL);
OSDSession *s = NULL;
bool check_for_latest_map = false;
int r = _calc_target(&op->target, nullptr);
switch(r) {
case RECALC_OP_TARGET_POOL_DNE:
check_for_latest_map = true;
break;
case RECALC_OP_TARGET_POOL_EIO:
if (op->has_completion()) {
op->complete(osdc_errc::pool_eio, -EIO);
}
return;
}
// Try to get a session, including a retry if we need to take write lock
r = _get_session(op->target.osd, &s, sul);
if (r == -EAGAIN ||
(check_for_latest_map && sul.owns_lock_shared()) ||
cct->_conf->objecter_debug_inject_relock_delay) {
epoch_t orig_epoch = osdmap->get_epoch();
sul.unlock();
if (cct->_conf->objecter_debug_inject_relock_delay) {
sleep(1);
}
sul.lock();
if (orig_epoch != osdmap->get_epoch()) {
// map changed; recalculate mapping
ldout(cct, 10) << __func__ << " relock raced with osdmap, recalc target"
<< dendl;
check_for_latest_map = _calc_target(&op->target, nullptr)
== RECALC_OP_TARGET_POOL_DNE;
if (s) {
put_session(s);
s = NULL;
r = -EAGAIN;
}
}
}
if (r == -EAGAIN) {
ceph_assert(s == NULL);
r = _get_session(op->target.osd, &s, sul);
}
ceph_assert(r == 0);
ceph_assert(s); // may be homeless
_send_op_account(op);
// send?
ceph_assert(op->target.flags & (CEPH_OSD_FLAG_READ|CEPH_OSD_FLAG_WRITE));
bool need_send = false;
if (op->target.paused) {
ldout(cct, 10) << " tid " << op->tid << " op " << op << " is paused"
<< dendl;
_maybe_request_map();
} else if (!s->is_homeless()) {
need_send = true;
} else {
_maybe_request_map();
}
unique_lock sl(s->lock);
if (op->tid == 0)
op->tid = ++last_tid;
ldout(cct, 10) << "_op_submit oid " << op->target.base_oid
<< " '" << op->target.base_oloc << "' '"
<< op->target.target_oloc << "' " << op->ops << " tid "
<< op->tid << " osd." << (!s->is_homeless() ? s->osd : -1)
<< dendl;
_session_op_assign(s, op);
if (need_send) {
_send_op(op);
}
// Last chance to touch Op here, after giving up session lock it can
// be freed at any time by response handler.
ceph_tid_t tid = op->tid;
if (check_for_latest_map) {
_send_op_map_check(op);
}
if (ptid)
*ptid = tid;
op = NULL;
sl.unlock();
put_session(s);
ldout(cct, 5) << num_in_flight << " in flight" << dendl;
}
void Objecter::_send_op(Op *op)
{
// rwlock is locked
// op->session->lock is locked
// backoff?
auto p = op->session->backoffs.find(op->target.actual_pgid);
if (p != op->session->backoffs.end()) {
hobject_t hoid = op->target.get_hobj();
auto q = p->second.lower_bound(hoid);
if (q != p->second.begin()) {
--q;
if (hoid >= q->second.end) {
++q;
}
}
if (q != p->second.end()) {
ldout(cct, 20) << __func__ << " ? " << q->first << " [" << q->second.begin
<< "," << q->second.end << ")" << dendl;
int r = cmp(hoid, q->second.begin);
if (r == 0 || (r > 0 && hoid < q->second.end)) {
ldout(cct, 10) << __func__ << " backoff " << op->target.actual_pgid
<< " id " << q->second.id << " on " << hoid
<< ", queuing " << op << " tid " << op->tid << dendl;
return;
}
}
}
ceph_assert(op->tid > 0);
MOSDOp *m = _prepare_osd_op(op);
if (op->target.actual_pgid != m->get_spg()) {
ldout(cct, 10) << __func__ << " " << op->tid << " pgid change from "
<< m->get_spg() << " to " << op->target.actual_pgid
<< ", updating and reencoding" << dendl;
m->set_spg(op->target.actual_pgid);
m->clear_payload(); // reencode
}
ldout(cct, 15) << "_send_op " << op->tid << " to "
<< op->target.actual_pgid << " on osd." << op->session->osd
<< dendl;
ConnectionRef con = op->session->con;
ceph_assert(con);
#if 0
// preallocated rx ceph::buffer?
if (op->con) {
ldout(cct, 20) << " revoking rx ceph::buffer for " << op->tid << " on "
<< op->con << dendl;
op->con->revoke_rx_buffer(op->tid);
}
if (op->outbl &&
op->ontimeout == 0 && // only post rx_buffer if no timeout; see #9582
op->outbl->length()) {
op->outbl->invalidate_crc(); // messenger writes through c_str()
ldout(cct, 20) << " posting rx ceph::buffer for " << op->tid << " on " << con
<< dendl;
op->con = con;
op->con->post_rx_buffer(op->tid, *op->outbl);
}
#endif
op->incarnation = op->session->incarnation;
if (op->trace.valid()) {
m->trace.init("op msg", nullptr, &op->trace);
}
op->session->con->send_message(m); //最终发送数据
}
_calc_target
osdmap->object_locator_to_pg获取目标对象所在的PG
osdmap->pg_to_up_acting_osd通过CRUSH算法,获取该PG对应的OSD列表
int Objecter::_calc_target(op_target_t *t, Connection *con, bool any_change)
{
// rwlock is locked
bool is_read = t->flags & CEPH_OSD_FLAG_READ;
bool is_write = t->flags & CEPH_OSD_FLAG_WRITE;
t->epoch = osdmap->get_epoch();
ldout(cct,20) << __func__ << " epoch " << t->epoch
<< " base " << t->base_oid << " " << t->base_oloc
<< " precalc_pgid " << (int)t->precalc_pgid
<< " pgid " << t->base_pgid
<< (is_read ? " is_read" : "")
<< (is_write ? " is_write" : "")
<< dendl;
const pg_pool_t *pi = osdmap->get_pg_pool(t->base_oloc.pool);
if (!pi) {
t->osd = -1;
return RECALC_OP_TARGET_POOL_DNE;
}
if (pi->has_flag(pg_pool_t::FLAG_EIO)) {
return RECALC_OP_TARGET_POOL_EIO;
}
ldout(cct,30) << __func__ << " base pi " << pi
<< " pg_num " << pi->get_pg_num() << dendl;
bool force_resend = false;
if (osdmap->get_epoch() == pi->last_force_op_resend) {
if (t->last_force_resend < pi->last_force_op_resend) {
t->last_force_resend = pi->last_force_op_resend;
force_resend = true;
} else if (t->last_force_resend == 0) {
force_resend = true;
}
}
// apply tiering
t->target_oid = t->base_oid;
t->target_oloc = t->base_oloc;
if ((t->flags & CEPH_OSD_FLAG_IGNORE_OVERLAY) == 0) {
if (is_read && pi->has_read_tier())
t->target_oloc.pool = pi->read_tier;
if (is_write && pi->has_write_tier())
t->target_oloc.pool = pi->write_tier;
pi = osdmap->get_pg_pool(t->target_oloc.pool);
if (!pi) {
t->osd = -1;
return RECALC_OP_TARGET_POOL_DNE;
}
}
pg_t pgid;
if (t->precalc_pgid) {
ceph_assert(t->flags & CEPH_OSD_FLAG_IGNORE_OVERLAY);
ceph_assert(t->base_oid.name.empty()); // make sure this is a pg op
ceph_assert(t->base_oloc.pool == (int64_t)t->base_pgid.pool());
pgid = t->base_pgid;
} else {
int ret = osdmap->object_locator_to_pg(t->target_oid, t->target_oloc,
pgid);
if (ret == -ENOENT) {
t->osd = -1;
return RECALC_OP_TARGET_POOL_DNE;
}
}
ldout(cct,20) << __func__ << " target " << t->target_oid << " "
<< t->target_oloc << " -> pgid " << pgid << dendl;
ldout(cct,30) << __func__ << " target pi " << pi
<< " pg_num " << pi->get_pg_num() << dendl;
t->pool_ever_existed = true;
int size = pi->size;
int min_size = pi->min_size;
unsigned pg_num = pi->get_pg_num();
unsigned pg_num_mask = pi->get_pg_num_mask();
unsigned pg_num_pending = pi->get_pg_num_pending();
int up_primary, acting_primary;
vector<int> up, acting;
ps_t actual_ps = ceph_stable_mod(pgid.ps(), pg_num, pg_num_mask);
pg_t actual_pgid(actual_ps, pgid.pool());
if (!lookup_pg_mapping(actual_pgid, osdmap->get_epoch(), &up, &up_primary,
&acting, &acting_primary)) {
osdmap->pg_to_up_acting_osds(actual_pgid, &up, &up_primary,
&acting, &acting_primary);
pg_mapping_t pg_mapping(osdmap->get_epoch(),
up, up_primary, acting, acting_primary);
update_pg_mapping(actual_pgid, std::move(pg_mapping));
}
bool sort_bitwise = osdmap->test_flag(CEPH_OSDMAP_SORTBITWISE);
bool recovery_deletes = osdmap->test_flag(CEPH_OSDMAP_RECOVERY_DELETES);
unsigned prev_seed = ceph_stable_mod(pgid.ps(), t->pg_num, t->pg_num_mask);
pg_t prev_pgid(prev_seed, pgid.pool());
if (any_change && PastIntervals::is_new_interval(
t->acting_primary,
acting_primary,
t->acting,
acting,
t->up_primary,
up_primary,
t->up,
up,
t->size,
size,
t->min_size,
min_size,
t->pg_num,
pg_num,
t->pg_num_pending,
pg_num_pending,
t->sort_bitwise,
sort_bitwise,
t->recovery_deletes,
recovery_deletes,
t->peering_crush_bucket_count,
pi->peering_crush_bucket_count,
t->peering_crush_bucket_target,
pi->peering_crush_bucket_target,
t->peering_crush_bucket_barrier,
pi->peering_crush_bucket_barrier,
t->peering_crush_mandatory_member,
pi->peering_crush_mandatory_member,
prev_pgid)) {
force_resend = true;
}
bool unpaused = false;
bool should_be_paused = target_should_be_paused(t);
if (t->paused && !should_be_paused) {
unpaused = true;
}
if (t->paused != should_be_paused) {
ldout(cct, 10) << __func__ << " paused " << t->paused
<< " -> " << should_be_paused << dendl;
t->paused = should_be_paused;
}
bool legacy_change =
t->pgid != pgid ||
is_pg_changed(
t->acting_primary, t->acting, acting_primary, acting,
t->used_replica || any_change);
bool split_or_merge = false;
if (t->pg_num) {
split_or_merge =
prev_pgid.is_split(t->pg_num, pg_num, nullptr) ||
prev_pgid.is_merge_source(t->pg_num, pg_num, nullptr) ||
prev_pgid.is_merge_target(t->pg_num, pg_num);
}
if (legacy_change || split_or_merge || force_resend) {
t->pgid = pgid;
t->acting = std::move(acting);
t->acting_primary = acting_primary;
t->up_primary = up_primary;
t->up = std::move(up);
t->size = size;
t->min_size = min_size;
t->pg_num = pg_num;
t->pg_num_mask = pg_num_mask;
t->pg_num_pending = pg_num_pending;
spg_t spgid(actual_pgid);
if (pi->is_erasure()) {
for (uint8_t i = 0; i < t->acting.size(); ++i) {
if (t->acting[i] == acting_primary) {
spgid.reset_shard(shard_id_t(i));
break;
}
}
}
t->actual_pgid = spgid;
t->sort_bitwise = sort_bitwise;
t->recovery_deletes = recovery_deletes;
t->peering_crush_bucket_count = pi->peering_crush_bucket_count;
t->peering_crush_bucket_target = pi->peering_crush_bucket_target;
t->peering_crush_bucket_barrier = pi->peering_crush_bucket_barrier;
t->peering_crush_mandatory_member = pi->peering_crush_mandatory_member;
ldout(cct, 10) << __func__ << " "
<< " raw pgid " << pgid << " -> actual " << t->actual_pgid
<< " acting " << t->acting
<< " primary " << acting_primary << dendl;
t->used_replica = false;
if ((t->flags & (CEPH_OSD_FLAG_BALANCE_READS |
CEPH_OSD_FLAG_LOCALIZE_READS)) &&
!is_write && pi->is_replicated() && t->acting.size() > 1) {
int osd;
ceph_assert(is_read && t->acting[0] == acting_primary);
if (t->flags & CEPH_OSD_FLAG_BALANCE_READS) {
int p = rand() % t->acting.size();
if (p)
t->used_replica = true;
osd = t->acting[p];
ldout(cct, 10) << " chose random osd." << osd << " of " << t->acting
<< dendl;
} else {
// look for a local replica. prefer the primary if the
// distance is the same.
int best = -1;
int best_locality = 0;
for (unsigned i = 0; i < t->acting.size(); ++i) {
int locality = osdmap->crush->get_common_ancestor_distance(
cct, t->acting[i], crush_location);
ldout(cct, 20) << __func__ << " localize: rank " << i
<< " osd." << t->acting[i]
<< " locality " << locality << dendl;
if (i == 0 ||
(locality >= 0 && best_locality >= 0 &&
locality < best_locality) ||
(best_locality < 0 && locality >= 0)) {
best = i;
best_locality = locality;
if (i)
t->used_replica = true;
}
}
ceph_assert(best >= 0);
osd = t->acting[best];
}
t->osd = osd;
} else {
t->osd = acting_primary;
}
}
if (legacy_change || unpaused || force_resend) {
return RECALC_OP_TARGET_NEED_RESEND;
}
if (split_or_merge &&
(osdmap->require_osd_release >= ceph_release_t::luminous ||
HAVE_FEATURE(osdmap->get_xinfo(acting_primary).features,
RESEND_ON_SPLIT))) {
return RECALC_OP_TARGET_NEED_RESEND;
}
return RECALC_OP_TARGET_NO_ACTION;
}
_get_session
/**
* Look up OSDSession by OSD id.
*
* @returns 0 on success, or -EAGAIN if the lock context requires
* promotion to write.
*/
int Objecter::_get_session(int osd, OSDSession **session,
shunique_lock<ceph::shared_mutex>& sul)
{
ceph_assert(sul && sul.mutex() == &rwlock);
if (osd < 0) {
*session = homeless_session;
ldout(cct, 20) << __func__ << " osd=" << osd << " returning homeless"
<< dendl;
return 0;
}
auto p = osd_sessions.find(osd);
if (p != osd_sessions.end()) {
auto s = p->second;
s->get();
*session = s;
ldout(cct, 20) << __func__ << " s=" << s << " osd=" << osd << " "
<< s->get_nref() << dendl;
return 0;
}
if (!sul.owns_lock()) {
return -EAGAIN;
}
auto s = new OSDSession(cct, osd);
osd_sessions[osd] = s;
s->con = messenger->connect_to_osd(osdmap->get_addrs(osd));
s->con->set_priv(RefCountedPtr{s});
logger->inc(l_osdc_osd_session_open);
logger->set(l_osdc_osd_sessions, osd_sessions.size());
s->get();
*session = s;
ldout(cct, 20) << __func__ << " s=" << s << " osd=" << osd << " "
<< s->get_nref() << dendl;
return 0;
}















 307
307











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









