







目录
1. 要点
Deep Q Network 的简称叫 DQN, 是将 Q learning 的优势 和 Neural networks 结合了. 如果我们使用 tabular Q learning, 对于每一个 state, action 我们都需要存放在一张 q_table 的表中. 如果像现实生活中, 情况可就比那个迷宫的状况复杂多了, 我们有千千万万个 state, 如果将这千万个 state 的值都放在表中, 受限于我们计算机硬件, 这样从表中获取数据, 更新数据是没有效率的. 这就是 DQN 产生的原因了. 我们可以使用神经网络来 估算 这个 state 的值, 这样就不需要一张表了.
这次的教程我们还是基于熟悉的 迷宫 环境, 重点在实现 DQN 算法, 之后我们再拿着做好的 DQN 算法去跑其他更有意思的环境.
2. 算法


整个算法乍看起来很复杂, 不过我们拆分一下, 就变简单了. 也就是个 Q learning 主框架上加了些装饰.
这些装饰包括:
- 记忆库 (用于重复学习)
- 神经网络计算 Q 值
- 暂时冻结
q_target参数 (切断相关性)
简单来说,DQN其实就是Q Learning的方法,只是结合上了神经网络。如果只是结合了神经网络去预测observation或者state,它会有很难收敛的问题。但是它用了2个非常著名的方法,记忆库(Experience Replay)和暂时冻结q_target参数(Fixed Q-targets)。
Fixed Q-targets:Q现实可能是好久之前的值,而Q估计是最近更新的值。1000步或者2000步后,才更新Q现实。这样切断了相关性,使得神经网络有效地收敛起来。
3. 代码
3.1 主程序(算法更新)
接下来我们对应上面的算法, 来实现主循环. 首先 import 所需模块.
from maze_env import Maze
from RL_brain import DeepQNetwork下面的代码, 就是 DQN 与环境交互最重要的部分.
def run_maze():
step = 0 # 用来控制什么时候学习
for episode in range(300):
# 初始化环境
observation = env.reset()
while True:
# 刷新环境
env.render()
# DQN 根据观测值选择行为
action = RL.choose_action(observation)
# 环境根据行为给出下一个 state, reward, 是否终止
observation_, reward, done = env.step(action)
# DQN 存储记忆
RL.store_transition(observation, action, reward, observation_)
# 控制学习起始时间和频率 (先累积一些记忆再开始学习)
if (step > 200) and (step % 5 == 0):
RL.learn()
# 将下一个 state_ 变为 下次循环的 state
observation = observation_
# 如果终止, 就跳出循环
if done:
break
step += 1 # 总步数
# end of game
print('game over')
env.destroy()
if __name__ == "__main__":
env = Maze()
RL = DeepQNetwork(env.n_actions, env.n_features,
learning_rate=0.01,
reward_decay=0.9,
e_greedy=0.9,
replace_target_iter=200, # 每 200 步替换一次 target_net 的参数
memory_size=2000, # 记忆上限
# output_graph=True # 是否输出 tensorboard 文件
)
env.after(100, run_maze)
env.mainloop()
RL.plot_cost() # 观看神经网络的误差曲线3.2 DeepQNetwork
我们使用 Tensorflow (如果还不了解 Tensorflow, 这里去往 经典的 Tensorflow 视频教程) 来搭建 DQN 当中的神经网络部分 (用来预测 Q 值).
3.2.1 两个神经网络
为了使用 Tensorflow 来实现 DQN, 比较推荐的方式是搭建两个神经网络, target_net 用于预测 q_target 值, 他不会及时更新参数. eval_net 用于预测 q_eval, 这个神经网络拥有最新的神经网络参数. 不过这两个神经网络结构是完全一样的, 只是里面的参数不一样. 在这个教程里能找到我们为什么要建立两个不同参数的神经网络.

3.2.2 神经网络结构
因为 DQN 的结构相比之前所讲的内容都不一样, 所以我们不使用继承来实现这次的功能. 这次我们创建一个 DeepQNetwork 的 class, 以及他神经网络部分的功能. 3.3节再说强化学习的更新部分.
class DeepQNetwork:
# 建立神经网络
def _build_net(self):3.2.3 创建两个网络
两个神经网络是为了固定住一个神经网络 (target_net) 的参数, target_net 是 eval_net 的一个历史版本, 拥有 eval_net 很久之前的一组参数, 而且这组参数被固定一段时间, 然后再被 eval_net 的新参数所替换. 而 eval_net 是不断在被提升的, 所以是一个可以被训练的网络 trainable=True. 而 target_net 的 trainable=False.
class DeepQNetwork:
def _build_net(self):
# -------------- 创建 eval 神经网络, 及时提升参数 --------------
self.s = tf.placeholder(tf.float32, [None, self.n_features], name='s') # 用来接收 observation
self.q_target = tf.placeholder(tf.float32, [None, self.n_actions], name='Q_target') # 用来接收 q_target 的值, 这个之后会通过计算得到
with tf.variable_scope('eval_net'):
# c_names(collections_names) 是在更新 target_net 参数时会用到
c_names, n_l1, w_initializer, b_initializer = \
['eval_net_params', tf.GraphKeys.GLOBAL_VARIABLES], 10, \
tf.random_normal_initializer(0., 0.3), tf.constant_initializer(0.1) # config of layers
# eval_net 的第一层. collections 是在更新 target_net 参数时会用到
with tf.variable_scope('l1'):
w1 = tf.get_variable('w1', [self.n_features, n_l1], initializer=w_initializer, collections=c_names)
b1 = tf.get_variable('b1', [1, n_l1], initializer=b_initializer, collections=c_names)
l1 = tf.nn.relu(tf.matmul(self.s, w1) + b1)
# eval_net 的第二层. collections 是在更新 target_net 参数时会用到
with tf.variable_scope('l2'):
w2 = tf.get_variable('w2', [n_l1, self.n_actions], initializer=w_initializer, collections=c_names)
b2 = tf.get_variable('b2', [1, self.n_actions], initializer=b_initializer, collections=c_names)
self.q_eval = tf.matmul(l1, w2) + b2
with tf.variable_scope('loss'): # 求误差
self.loss = tf.reduce_mean(tf.squared_difference(self.q_target, self.q_eval))
with tf.variable_scope('train'): # 梯度下降
self._train_op = tf.train.RMSPropOptimizer(self.lr).minimize(self.loss)
# ---------------- 创建 target 神经网络, 提供 target Q ---------------------
self.s_ = tf.placeholder(tf.float32, [None, self.n_features], name='s_') # 接收下个 observation
with tf.variable_scope('target_net'):
# c_names(collections_names) 是在更新 target_net 参数时会用到
c_names = ['target_net_params', tf.GraphKeys.GLOBAL_VARIABLES]
# target_net 的第一层. collections 是在更新 target_net 参数时会用到
with tf.variable_scope('l1'):
w1 = tf.get_variable('w1', [self.n_features, n_l1], initializer=w_initializer, collections=c_names)
b1 = tf.get_variable('b1', [1, n_l1], initializer=b_initializer, collections=c_names)
l1 = tf.nn.relu(tf.matmul(self.s_, w1) + b1)
# target_net 的第二层. collections 是在更新 target_net 参数时会用到
with tf.variable_scope('l2'):
w2 = tf.get_variable('w2', [n_l1, self.n_actions], initializer=w_initializer, collections=c_names)
b2 = tf.get_variable('b2', [1, self.n_actions], initializer=b_initializer, collections=c_names)
self.q_next = tf.matmul(l1, w2) + b23.3 思维决策
接着上节内容, 我们来定义 DeepQNetwork 的决策和思考部分.
3.3.1 代码主结构
定义完上次的神经网络部分以后, 这次我们来定义其他部分. 包括:
class DeepQNetwork:
# 上次的内容
def _build_net(self):
# 这次的内容:
# 初始值
def __init__(self):
# 存储记忆
def store_transition(self, s, a, r, s_):
# 选行为
def choose_action(self, observation):
# 学习
def learn(self):
# 看看学习效果 (可选)
def plot_cost(self):3.3.2 初始值
class DeepQNetwork:
def __init__(
self,
n_actions,
n_features,
learning_rate=0.01,
reward_decay=0.9,
e_greedy=0.9,
replace_target_iter=300,
memory_size=500,
batch_size=32,
e_greedy_increment=None,
output_graph=False,
):
self.n_actions = n_actions
self.n_features = n_features
self.lr = learning_rate
self.gamma = reward_decay
self.epsilon_max = e_greedy # epsilon 的最大值
self.replace_target_iter = replace_target_iter # 更换 target_net 的步数
self.memory_size = memory_size # 记忆上限
self.batch_size = batch_size # 每次更新时从 memory 里面取多少记忆出来
self.epsilon_increment = e_greedy_increment # epsilon 的增量
self.epsilon = 0 if e_greedy_increment is not None else self.epsilon_max # 是否开启探索模式, 并逐步减少探索次数
# 记录学习次数 (用于判断是否更换 target_net 参数)
self.learn_step_counter = 0
# 初始化全 0 记忆 [s, a, r, s_]
self.memory = np.zeros((self.memory_size, n_features*2+2)) # 和视频中不同, 因为 pandas 运算比较慢, 这里改为直接用 numpy
# 创建 [target_net, evaluate_net]
self._build_net()
# 替换 target net 的参数
t_params = tf.get_collection('target_net_params') # 提取 target_net 的参数
e_params = tf.get_collection('eval_net_params') # 提取 eval_net 的参数
self.replace_target_op = [tf.assign(t, e) for t, e in zip(t_params, e_params)] # 更新 target_net 参数
self.sess = tf.Session()
# 输出 tensorboard 文件
if output_graph:
# $ tensorboard --logdir=logs
tf.summary.FileWriter("logs/", self.sess.graph)
self.sess.run(tf.global_variables_initializer())
self.cost_his = [] # 记录所有 cost 变化, 用于最后 plot 出来观看3.3.3 存储记忆
DQN 的精髓部分之一: 记录下所有经历过的步, 这些步可以进行反复的学习, 所以是一种 off-policy 方法, 你甚至可以自己玩, 然后记录下自己玩的经历, 让这个 DQN 学习你是如何通关的.
class DeepQNetwork:
def __init__(self):
...
def store_transition(self, s, a, r, s_):
if not hasattr(self, 'memory_counter'):
self.memory_counter = 0
# 记录一条 [s, a, r, s_] 记录
transition = np.hstack((s, [a, r], s_))
# 总 memory 大小是固定的, 如果超出总大小, 旧 memory 就被新 memory 替换
index = self.memory_counter % self.memory_size
self.memory[index, :] = transition # 替换过程
self.memory_counter += 13.3.4 选行为
和之前的 QLearningTable, SarsaTable 等一样, 都需要一个选行为的功能.
class DeepQNetwork:
def __init__(self):
...
def store_transition(self, s, a, r, s_):
...
def choose_action(self, observation):
# 统一 observation 的 shape (1, size_of_observation)
observation = observation[np.newaxis, :]
if np.random.uniform() < self.epsilon:
# 让 eval_net 神经网络生成所有 action 的值, 并选择值最大的 action
actions_value = self.sess.run(self.q_eval, feed_dict={self.s: observation})
action = np.argmax(actions_value)
else:
action = np.random.randint(0, self.n_actions) # 随机选择
return action3.3.5 学习
最重要的一步来了, 就是在 DeepQNetwork 中, 是如何学习, 更新参数的. 这里涉及了 target_net 和 eval_net 的交互使用.
class DeepQNetwork:
def __init__(self):
...
def store_transition(self, s, a, r, s_):
...
def choose_action(self, observation):
...
def _replace_target_params(self):
...
def learn(self):
# 检查是否替换 target_net 参数
if self.learn_step_counter % self.replace_target_iter == 0:
self.sess.run(self.replace_target_op)
print('\ntarget_params_replaced\n')
# 从 memory 中随机抽取 batch_size 这么多记忆
if self.memory_counter > self.memory_size:
sample_index = np.random.choice(self.memory_size, size=self.batch_size)
else:
sample_index = np.random.choice(self.memory_counter, size=self.batch_size)
batch_memory = self.memory[sample_index, :]
# 获取 q_next (target_net 产生了 q) 和 q_eval(eval_net 产生的 q)
q_next, q_eval = self.sess.run(
[self.q_next, self.q_eval],
feed_dict={
self.s_: batch_memory[:, -self.n_features:],
self.s: batch_memory[:, :self.n_features]
})
# 下面这几步十分重要. q_next, q_eval 包含所有 action 的值,
# 而我们需要的只是已经选择好的 action 的值, 其他的并不需要.
# 所以我们将其他的 action 值全变成 0, 将用到的 action 误差值 反向传递回去, 作为更新凭据.
# 这是我们最终要达到的样子, 比如 q_target - q_eval = [1, 0, 0] - [-1, 0, 0] = [2, 0, 0]
# q_eval = [-1, 0, 0] 表示这一个记忆中有我选用过 action 0, 而 action 0 带来的 Q(s, a0) = -1, 所以其他的 Q(s, a1) = Q(s, a2) = 0.
# q_target = [1, 0, 0] 表示这个记忆中的 r+gamma*maxQ(s_) = 1, 而且不管在 s_ 上我们取了哪个 action,
# 我们都需要对应上 q_eval 中的 action 位置, 所以就将 1 放在了 action 0 的位置.
# 下面也是为了达到上面说的目的, 不过为了更方面让程序运算, 达到目的的过程有点不同.
# 是将 q_eval 全部赋值给 q_target, 这时 q_target-q_eval 全为 0,
# 不过 我们再根据 batch_memory 当中的 action 这个 column 来给 q_target 中的对应的 memory-action 位置来修改赋值.
# 使新的赋值为 reward + gamma * maxQ(s_), 这样 q_target-q_eval 就可以变成我们所需的样子.
# 具体在下面还有一个举例说明.
q_target = q_eval.copy()
batch_index = np.arange(self.batch_size, dtype=np.int32)
eval_act_index = batch_memory[:, self.n_features].astype(int)
reward = batch_memory[:, self.n_features + 1]
q_target[batch_index, eval_act_index] = reward + self.gamma * np.max(q_next, axis=1)
"""
假如在这个 batch 中, 我们有2个提取的记忆, 根据每个记忆可以生产3个 action 的值:
q_eval =
[[1, 2, 3],
[4, 5, 6]]
q_target = q_eval =
[[1, 2, 3],
[4, 5, 6]]
然后根据 memory 当中的具体 action 位置来修改 q_target 对应 action 上的值:
比如在:
记忆 0 的 q_target 计算值是 -1, 而且我用了 action 0;
记忆 1 的 q_target 计算值是 -2, 而且我用了 action 2:
q_target =
[[-1, 2, 3],
[4, 5, -2]]
所以 (q_target - q_eval) 就变成了:
[[(-1)-(1), 0, 0],
[0, 0, (-2)-(6)]]
最后我们将这个 (q_target - q_eval) 当成误差, 反向传递会神经网络.
所有为 0 的 action 值是当时没有选择的 action, 之前有选择的 action 才有不为0的值.
我们只反向传递之前选择的 action 的值,
"""
# 训练 eval_net
_, self.cost = self.sess.run([self._train_op, self.loss],
feed_dict={self.s: batch_memory[:, :self.n_features],
self.q_target: q_target})
self.cost_his.append(self.cost) # 记录 cost 误差
# 逐渐增加 epsilon, 降低行为的随机性
self.epsilon = self.epsilon + self.epsilon_increment if self.epsilon < self.epsilon_max else self.epsilon_max
self.learn_step_counter += 13.3.6 看学习效果
为了看看学习效果, 我们在最后输出学习过程中的 cost 变化曲线.
class DeepQNetwork:
def __init__(self):
...
def store_transition(self, s, a, r, s_):
...
def choose_action(self, observation):
...
def _replace_target_params(self):
...
def learn(self):
...
def plot_cost(self):
import matplotlib.pyplot as plt
plt.plot(np.arange(len(self.cost_his)), self.cost_his)
plt.ylabel('Cost')
plt.xlabel('training steps')
plt.show()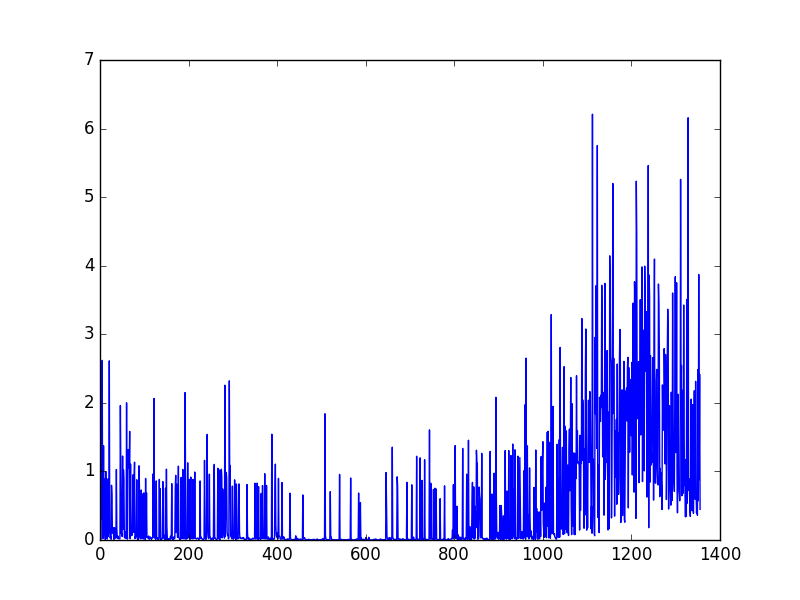
可以看出曲线并不是平滑下降的, 这是因为 DQN 中的 input 数据是一步步改变的, 而且会根据学习情况, 获取到不同的数据. 所以这并不像一般的监督学习, DQN 的 cost 曲线就有所不同了.
如果想一次性看到全部代码, 请去我的Github。
3.4 修改版的 DQN

最后提供一种修改版的DQN代码, 这是录制完视频以后做的, 这是将 q_target 的计算也加在了 Tensorflow 的 graph 里面. 这种结构还是有好处的, 作为学习样本的话, 计算结构全部在 tensorboard 上, 就更好理解, 代码结构也更好理解.
我只在原本的 DQN 代码上改了一点点东西, 大家应该可以很容易辨别. 修改版的代码在这.
3.5 说明
在这个迷宫的例子中,去掉了一个黑坑,这是因为如果还按之前的例子有两个黑坑,agent的记忆中会存在大量掉进黑坑中的情况,所以不能对获得宝藏的路径进行很好的学习。正样本和负样本是对半分的记忆时能够获得较好的效果。















 539
539











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









