









在本文中,我们描述了一种估计校准摄像机(在实验车辆上定位)和环境的立体几何形状的运动的方法。使用的唯一数据是视频输入。实时计算相机运动的稳健估计,选择关键帧并允许特征3D重建。由于引入了快速且局部的束调整方法,该算法特别适合于长图像序列的重建,该方法确保沿着序列估计的相机姿势的良好准确性和一致性。与全局捆绑调整相比,它还大大降低了计算复杂性。
一增量算法的描述
算法首先确定将用于设置全局帧和系统集合的第一个三元组图像。然后用特征检测和匹配对视频流的每个帧执行稳健的姿势计算。选择一些帧成为用于3D点三角测量的关键帧。系统以增量方式运行,当添加新的关键帧和3D点时,我们继续进行局部束调整。
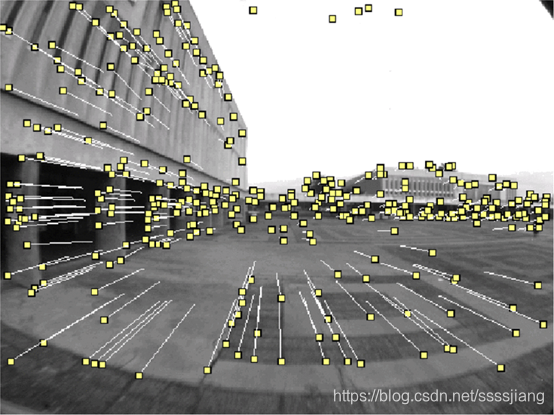
1.1兴趣点的检测和匹配
检测哈里斯角,然后对于图1中的兴趣点,选择图2中定义的感兴趣区域中一些候选对应点,然后计算两个图中兴趣点和候选对应点及候选点邻域的相关,选择相关高的对作为对应点对。
1.2序列初始化
我们要选择相对较远的帧才能计算极线几何,但是又要有足够多的共同点。
1.选择我们 作为关键帧,
作为关键帧, 距离稍远,但是有M个匹配的兴趣点,
距离稍远,但是有M个匹配的兴趣点, 与
与 也有M个匹配的兴趣点,而与至少有
也有M个匹配的兴趣点,而与至少有 个兴趣点。
个兴趣点。
2. 作为世界坐标系。
3.用5点算法和RANSAC算前三个帧相对位姿。
4.兴趣点三角化为3D点,用中的匹配点。
5.LM算法完成位姿估计和三维坐标优化。
1.3实时鲁棒的姿态估计
我们假设相机姿势 至
至 先前已在参考重建框架中计算过。目标是计算相机位姿
先前已在参考重建框架中计算过。目标是计算相机位姿 ,我们匹配最后一帧
,我们匹配最后一帧 和最后选择的关键帧
和最后选择的关键帧 确定一组点p,它们在相机
确定一组点p,它们在相机 上投影位置已知,而且这组点的3D位置也已经算过了。
上投影位置已知,而且这组点的3D位置也已经算过了。
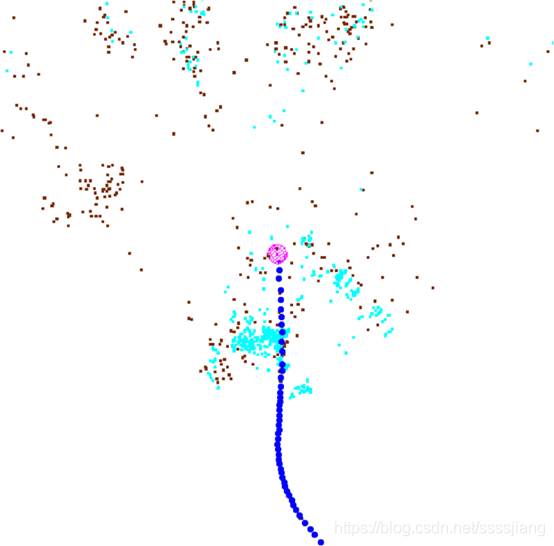
1.从 重建的3D点,我们使用Grunert姿势估计算法来计算相机的位置C.(RANSAC过程给出了相机的初始估计Ç然后优化RT,用快速LM优化。)
重建的3D点,我们使用Grunert姿势估计算法来计算相机的位置C.(RANSAC过程给出了相机的初始估计Ç然后优化RT,用快速LM优化。)
2.计算我们相机的协方差矩阵接,我们可以画90%的置信椭圆,如果Cov是协方差矩阵那么置信椭圆有 ,
, 服从
服从 分布。
分布。
1.4 关键帧的选择和3D点的重建
并非所有的输入帧都被考虑用于3d重建,我们设置了一个标准,指示是否必须将新帧添加为关键帧。(标准:1.有足够的匹配点,2.计算位姿的确定性高)
确定了关键帧之后,对匹配点使用标准的三角测量方法进行重建。
1.5 局部束调整
当选择出最后一个关键帧 加入系统,则执行优化阶段。
加入系统,则执行优化阶段。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









