






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
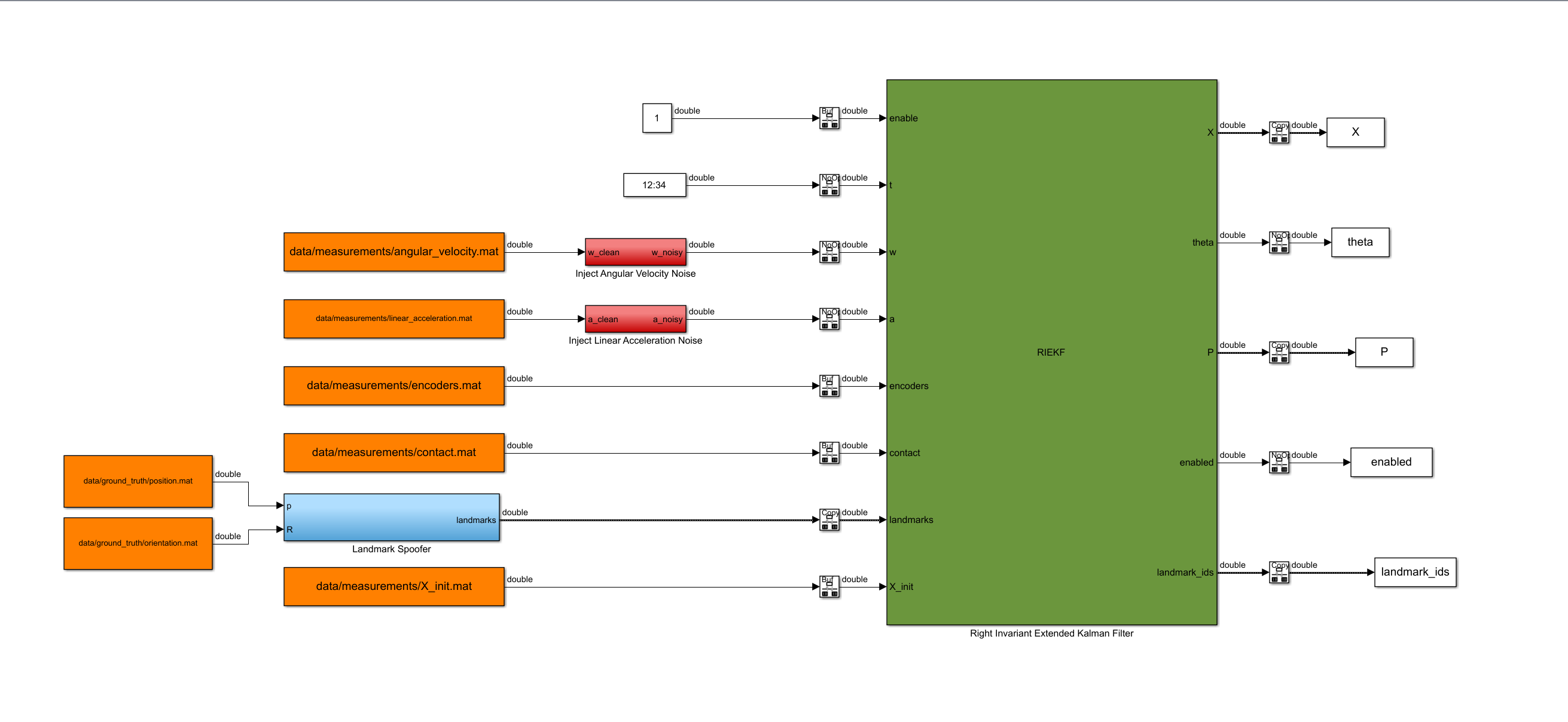
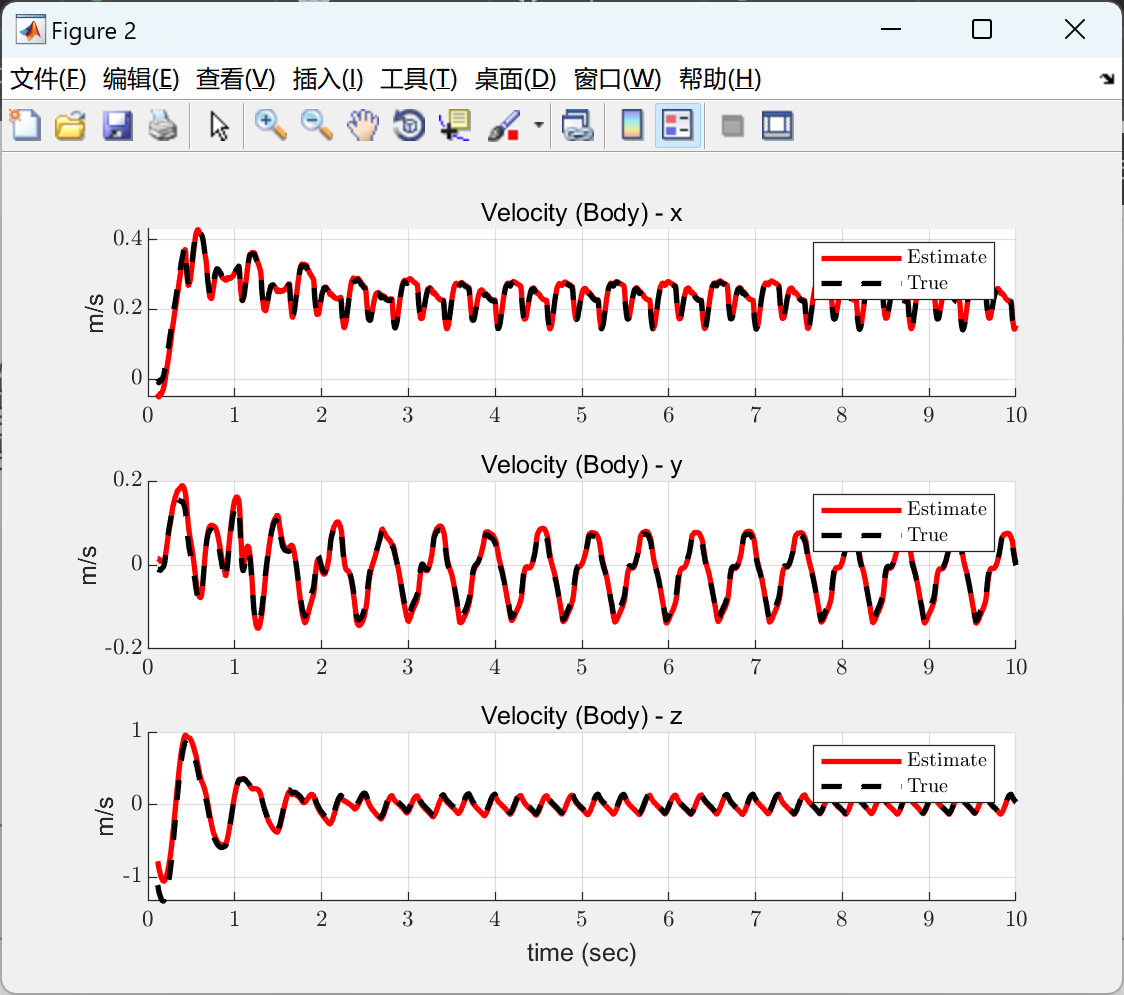
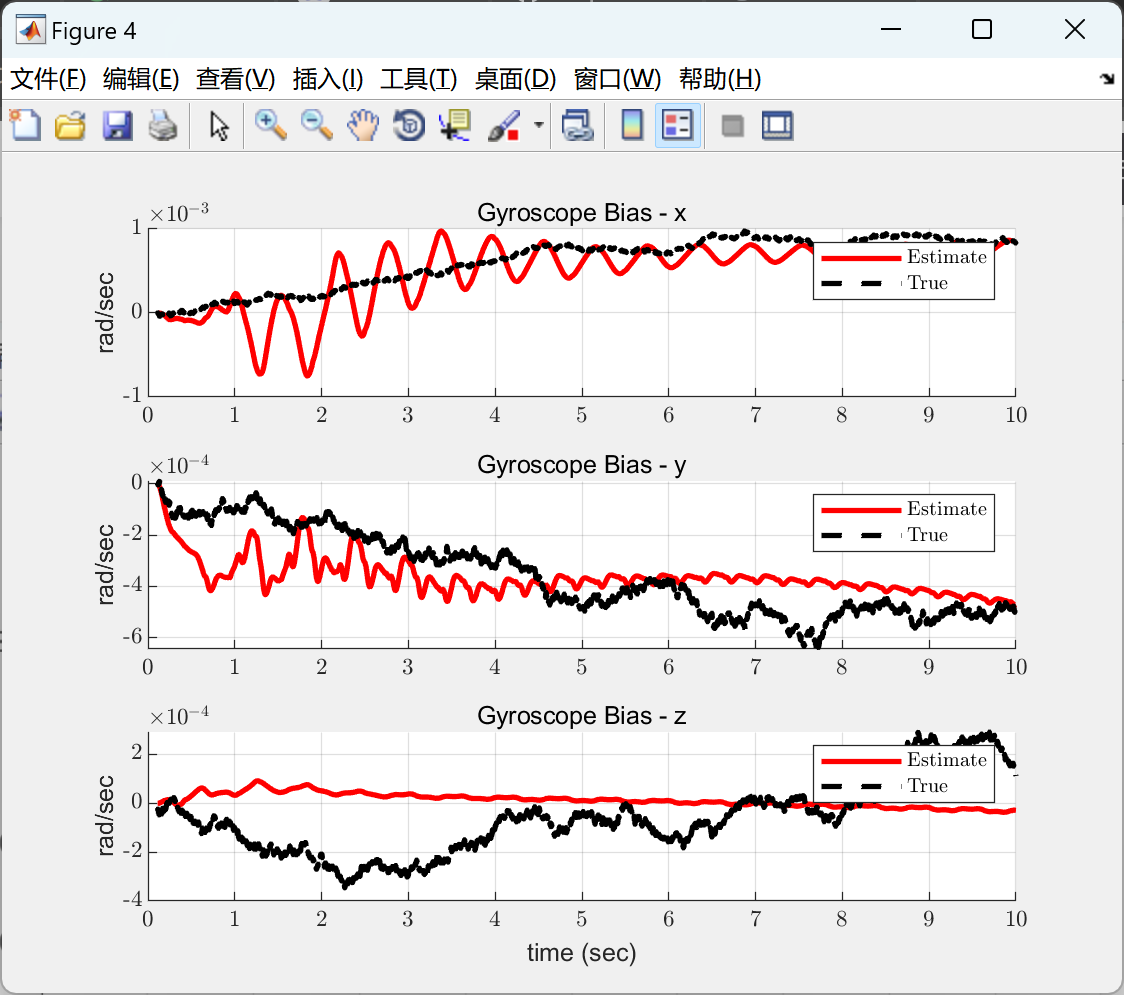
摘要—随着微型空中飞行器(MAVs)变得更加价格实惠和普及,它们在复杂的城市环境中的用途将变得更加理想,例如检查、监测和投递。在这些环境中的导航需求比传统GNSS系统提供的位置精度更高。虽然MAVs通常包含惯性测量单元(IMUs),但它们基于积分的状态估计随时间容易漂移。我们探讨了使用传感器融合来结合这些互补传感器的用法。在这个项目中,我们使用不变扩展卡尔曼滤波器(InEKF)来估计MAV在具有挑战性的城市环境中的位置。我们通过将估计位置与地面真实数据集进行比较来评估我们的结果。
关键词—不变扩展卡尔曼滤波器(InEKF),定位
标准的扩展卡尔曼滤波器(EKF)通过线性化动态方程来估计状态之间的协方差。然而,这会导致一些限制,比如无法保证收敛性。与此同时,增强卡尔曼滤波器(In-EKF)可以解决上述问题,并且具有严格的数学推导作为保证。

📚2 运行结果





部分代码:
%%Initializations
%TODO: load data here
data = load('lib/IMU_GPS_GT_data.mat');
IMUData = data.imu;
GPSData = data.gpsAGL;
gt = data.gt;
addpath([cd, filesep, 'lib'])
initialStateMean = eye(5);
initialStateCov = eye(9);
deltaT = 1 / 30; %hope this doesn't cause floating point problems
numSteps = 500000;%TODO largest timestamp in GPS file, divided by deltaT, cast to int
results = zeros(7, numSteps);
% time x y z Rx Ry Rz
% sys = system_initialization(deltaT);
Q = blkdiag(eye(3)*(0.35)^2, eye(3)*(0.015)^2, zeros(3));
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]Blake Karwoski, Kun Huang, Yue Wu, Zhaoguo Wang University of Michigan, Ann Arbor, MI















 74
74

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









