




一、多态的定义
类中定义的方法是同一个方法名,但却是不同的实现结果。
具体体现在方法重载与方法重写两方面。
二、方法重载与方法重写
1.方法重载
相同的方法名,不同的参数列表(参数的个数或者参数的类型),与返回值类型无关,与static关键字无关。决定调用哪个重载的方法是由参数决定的,所以也把方法重载叫做编译时多态。
class Employee{
var name : String = ""
var age : Int64 = 0
func workWay()
{
println("做普通的工作")
}
func workWay(name:String)
{
println("高层做决策性工作")
}
}
main(): Int64 {
var employee : Employee = Employee()
employee.workWay()
employee.workWay("高层领导")
return 0
}
如上述代码所演示,Employee类中两个相同方法名的workWay方法其中有一个带有参数,此时构成方法重载,具体调用哪个方法取决于参数。如不带参数就会调用第一个方法,带了参数后就会调用第二个方法。
具体演示结果如下图:

2.方法重写
在继承关系中,子类和父类具有相同的方法名,相同的参数列表(参数的个数和类型),相同的返回值类型,与static无关。决定调用哪个重名的方法,是由创建的对象来决定的。
注意:在父类中的方法如果要被子类重写,父类的方法要用open修饰,否则子类是不能够重写的。
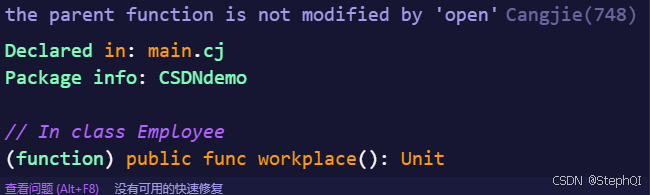
open class Employee{
var name : String = ""
var age : Int64 = 0
public open func workplace():Unit
{
println("普通职员的工作地点")
}
}
class Manager <: Employee{
public override func workplace():Unit
{
println("高层领导的工作地点")
}
}
main(): Int64 {
var employee : Employee = Employee()
var manager : Manager = Manager()
employee.workplace()
manager.workplace()
return 0
}
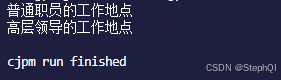
运行结果:
当为静态方法时:
open class Employee{
var name : String = ""
var age : Int64 = 0
static public func workplace():Unit
{
println("普通职员的工作地点")
}
}
class Manager <: Employee{
static public func workplace():Unit
{
println("高层领导的工作地点")
}
}
class Worker <: Employee{
}
main(): Int64 {
var employee : Employee = Employee()
var manager : Employee = Manager()
var worker : Employee = Worker()
Employee.workplace()
Manager.workplace()
return 0
}
结果为:
注意:仓颉中静态方法不能通过创建对象进行访问,须直接通过类名进行访问,这也是仓颉与Java的不同之处。
由此可见,创建父类的对象调用的方法为父类里的同名方法,创建子类的对象调用的方法为子类里的同名方法。
3.动态绑定机制
动态绑定机制就是指一个父类指向多个子类的现象。
open class Employee{
var name : String = ""
var age : Int64 = 0
public open func workplace():Unit
{
println("普通职员的工作地点")
}
}
class Manager <: Employee{
public func workplace():Unit
{
println("高层领导的工作地点")
}
}
class Worker <: Employee{
}
main(): Int64 {
var employee : Employee = Employee()
var manager : Employee = Manager()
var worker : Employee = Worker()
employee.workplace()
manager.workplace()
return 0
}
创建对象时,类型全部是Employee父类,通过调用workplace方法和上述结果一致。

















 2577
2577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









