









USART 系列文章目录
五一假期,博主闲着没事,想起之前自己调试串口控制LED的亮灭问题尚未解决,便开始调试,再调试了一会时间后,觉得应该把它记录下来。这一切问题的起源还得怪之前调试不认真,太浮躁了。
文章目录
前言
其中使用USART串口的一些配置方法在我之前的博客有粗略带过,纯小白看不懂建议看看其他csdn大佬们写的配置USART的方法和步骤。
我写这篇博客的目的是通过USART串口控制LED的亮灭问题,记录下我所调试过程中遇到的问题,和对于串口的一些自己的理解。
一、配置串口
由于我之前的博客有带过,就那几个步骤,注意下需要和电脑进行通信所配置的串口号、波特率、奇偶校验位、停止位、数据位那几个特殊注意下,以方便和电脑的串口调试助手进行通信。
我所使用的是XCOM的串口调试助手。
这里就贴下我所配置的串口代码吧
void uart_init(u32 bound){
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
}
二、主要操作
我试过了两种方法来控制LED亮灭,一种是通过串口中断从而使LED的状态翻转,另外一种则是跳过中断,在主函数中使LED的状态翻转。
1.通过串口中断
基于配置好的串口,我们需要加上一个串口中断初始化的配置函数和串口中断处理函数
串口中断初始化的配置函数如下:
void NVIC_Init()
{
NVIC_InitTypeDef NVIC_InitStructure;
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
}
对于中断的相应问题日后的会特意写一篇博客来分析。
font color=#256AAA >串口中断处理函数如下:
void USART1_IRQHandler(void)
{
u8 Res;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
printf("Receive Succsed: %2x \r\n", Res);//回复接收完成
if(Res==0x01)
LED0=!LED0;
//USART_ClearFlag(USART1,USART_IT_RXNE);
}
}
分析:在该段函数中,我先定义了一个Res的变量来储存串口接收到的数值,再通过printf函数(使用的是原子哥所重写的函数)将其打印到串口。
使用得到Res的函数与对应的数值进行比较,从而翻转LED0的状态。
2.通过主函数
char ReceivedData = NULL;
int main( void )
{
u8 Receive_Data = 0;
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_2 ); /* 设置NVIC中断分组2:2位抢占优先级,2位响应优先级 */
uart_init( 115200 ); /* 串口初始化为9600 */
delay_init(); /* 延时函数初始化 */
LED_Init();
BEEP_Init();
while ( 1 )
{
delay_ms(1000);
printf("开始测试\r\n");
if(USART_GetITStatus(USART1, USART_IT_RXNE)) //若接收到数据
{
Receive_Data = USART_ReceiveData(USART1); //读取数据后,RXNE标志位自动清零;
printf("Receive Succsed: %d \r\n", Receive_Data);
if(Receive_Data == '1')
{
LED0 = !LED0;
}
else
{
printf("runing\r\n");
delay_ms(2000);
}
}
}
}
分析:在该段函数中,同样也是使用了一个中间变量来储存串口接收的数据。
———————————————————————————————————————
要注意的是:用此方法,轮询接收stm32发送的时候,只能接收一个字符,而不能接收多个字符,接收多个字符就会出问题,同时在串口调试助手的时候,要将“发送新行”取消勾选,否则也是会出问题的。
三、库函数分析
在这几段代码中我都使用到了库函数,下面将其列出来:
- USART_GetITStatus(USART1, USART_IT_RXNE)
- USART_ReceiveData(USART1)
对于通过串口控制LED状态翻转的实现中,这些库函数格外重要。
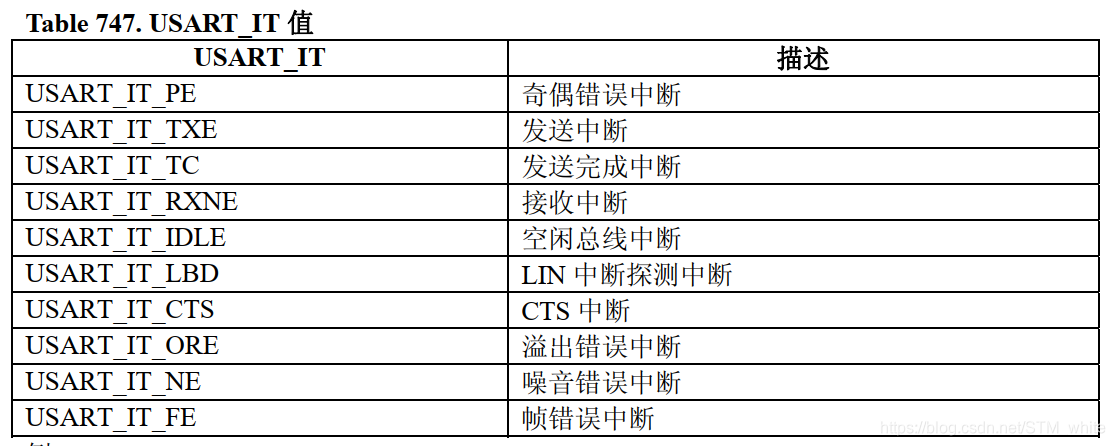
1.USART_GetITStatus(USARTx, USART_IT_RXNE)
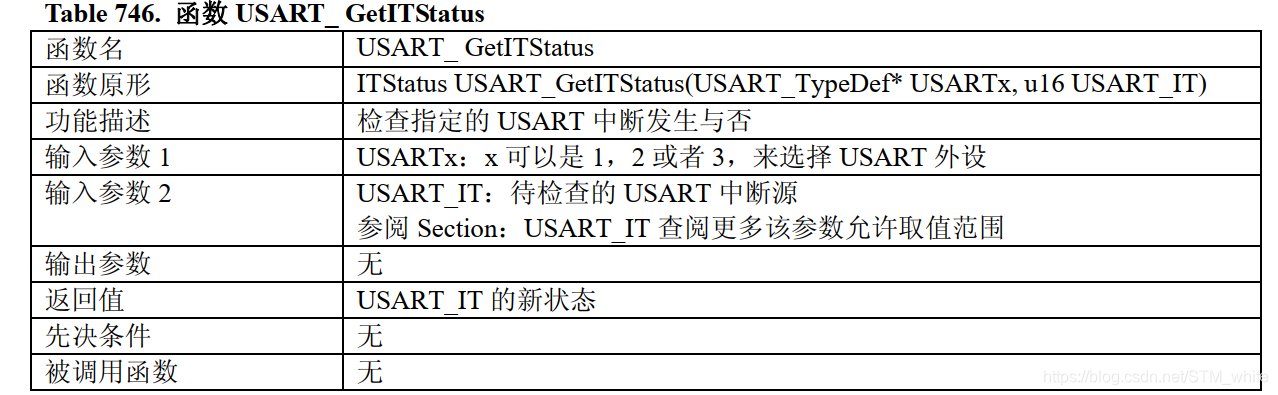
该函数可以用于获取中断信息,并返回1或者0.
在这个功能的实现中,使用了USART_IT_RXNE这个状态标记位。
2.USART_ReceiveData(USART1)
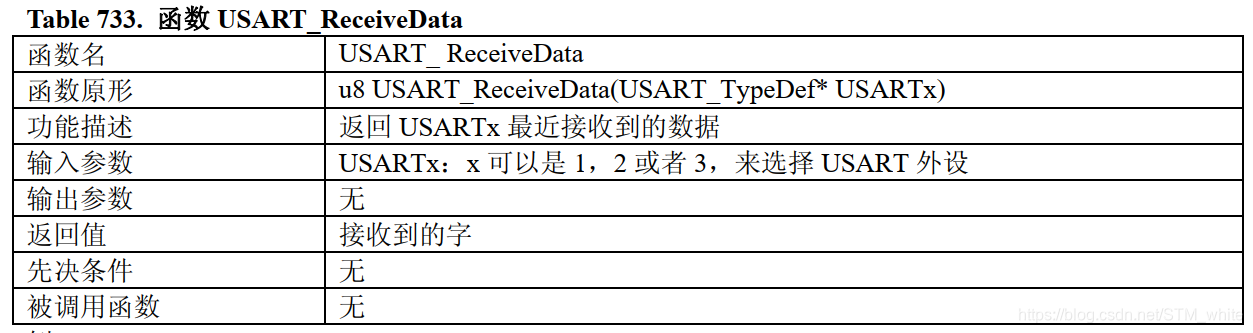
该函数可以将接收到的数据赋值给另外一个变量。
Receive_Data = USART_ReceiveData(USART1); //读取数据后,RXNE标志位自动清零;
总结
注意USB转TTL接口的接线问题,确保它正确接线。
同时,各位读者还可以基于这篇博客的基础,自己外扩串口控制其他模块的功能。举一反三。

















 937
937

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









