








视频演示效果:https://www.bilibili.com/video/BV1N54y1s74m/
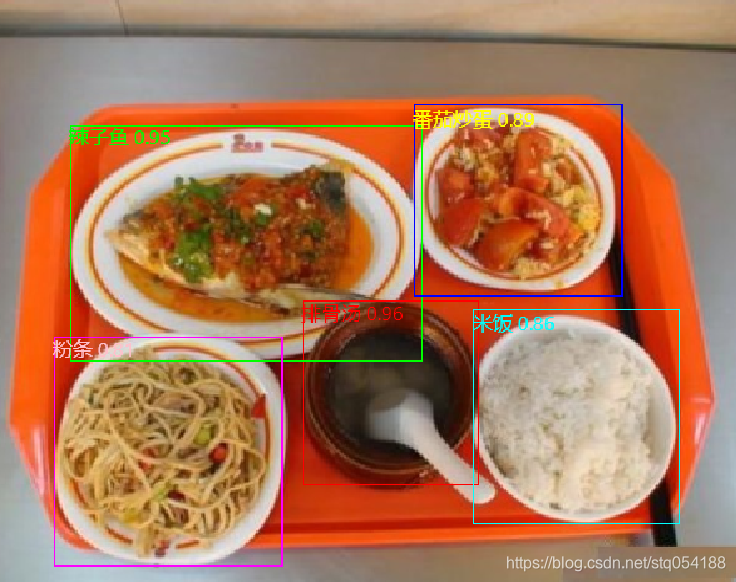
菜品识别效果展示

视频演示效果:https://www.bilibili.com/video/BV1N54y1s74m/
菜品识别效果展示
 719
1万+
1257
719
1万+
1257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























