




论文名称:大规模时序图数据的查询处理与挖掘技术综述
论文研究背景
论文的研究背景是时序图在作为一种带有时间维度的图结构,在图数据的查询处理与挖掘工作中扮演着越来越重要的角色。时序图的结构会随时间序列发生改变,即时序图的边由时间激活.而且由 于时序图上每条边都有记录时间的标签,所以时序图包含的信息量相较于静态图也更为大,这使得现有的数据查询处理方法不能很好地应用于时序图中。因此如何解决时序图上的数据查询处理与挖掘问题得到研究者们的关注。
论文内容
对现有的时序图上的查询处理与挖掘方法进行了综述,详细介绍了时序图的应用背景和基本定义,梳理了现有的时序图模型,并从图查询处理方法、图挖掘方法和时序图管理系统3个方面对时序图上现有的工作进行了详细的介绍和分析。最后对时序图上可能的研究方向进行了展望, 为相关研究提供参考。
1.时序图的数据定义与模型
1.1时序图定义
那时序图到底是什么了?研究者们将其中按照时间变化的动态网络建模成时序图,如将时间作为边上的权值,通过时间序列来表示顶点和边之间的连接和交互关系。
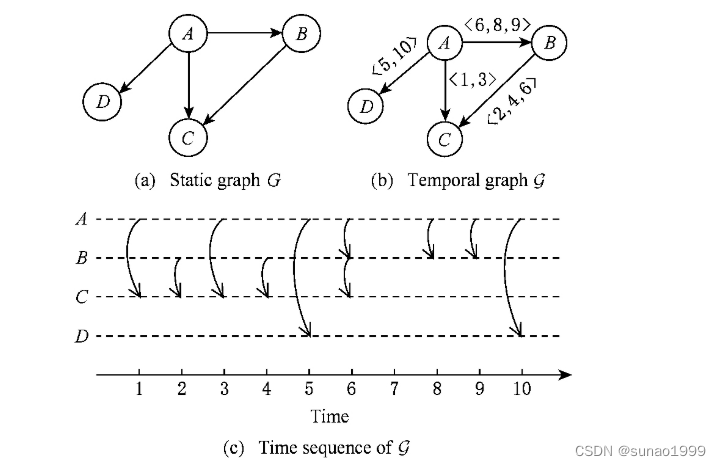
图1(a)表示静态图;图1(b)表示存在于1~10时间阈值内的时序图;图1(c)表示图1(b)中顶点和边对应的时间序列.只有在时刻6时A和C是通过
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 231
231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









