







1 光栅传感器原理和结构
1.1 基本原理
在玻璃或其他材料上, 像刻度尺那样刻出一系列黑白相间、间隔相同的细小条纹, 没有刻划的白的地方透光, 刻划的发黑不透光, 这就是光栅。也有在金属上刻线, 利用光反射工作的光栅。按形状和用途光栅可分为长光栅和圆光栅。长光栅用于位移检测,圆光栅用于角度的测量, 和位移测量原理基本一致,也是借助于莫尔条纹。为便于叙述, 本文的分析以利用长光栅的位移传感器为例。光栅传感器的作用是精密测量, 其测量原理建立在莫尔条纹的基础上。由于光的干涉效应, 将等栅距的两块光栅以微小夹角Q重叠在一起, 可以看到在近似垂直栅线方向上出现明暗相间的条纹, 称为莫尔条纹, 如图1 所示: 其B 为莫尔条纹间距,W为光栅间距
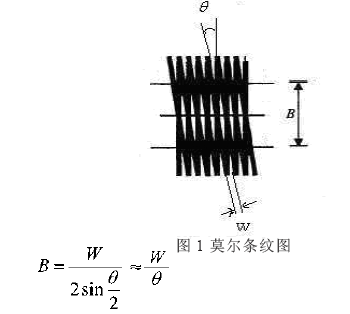
光栅线夹角小, 莫尔条纹宽带B 越大, 相当于把W放大了1/ 倍, 大大的提高了测量灵敏度, 也方便了光电元件的放置。
1.2 光栅传感器工作方式
通常光栅传感器是由光路系统、一对光栅副( 标尺光栅和指示光栅) 、与指示光栅相对位置固定的光电接收件、整形细分电路组成。当光栅付中任一光栅沿垂直于刻线方向移动时, 莫尔条纹就会沿近似垂直于光栅移动的方向运动。当光栅移动一个栅距时, 莫尔条纹就移动一个条纹间隔B。光电接收元件将莫尔条纹的明暗强弱变化转换为电量输出。该正弦波经整形为方波, 在一个完整的光栅测量系统中,后级电路( 往往是以单片机为核心) 接收该信号后根据两路或多路信号的时序关系判别运动方向, 并根据方波个数判断位移。为了提高测量精度, 需对信号进行细分, 下边以4 倍细分为例介绍一下信号的处理过程。根据莫尔条纹的性质, 光电元件产生的信号近似为正弦波。
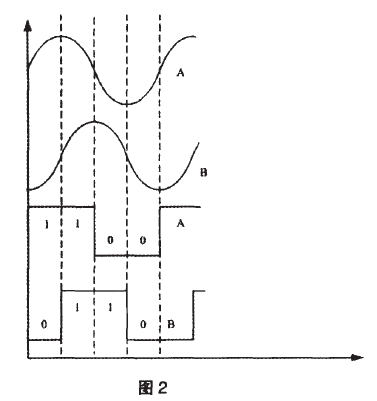
A、B 为两个光电元件, 使A、B 的位置相距1/4B, 那么A、B 输出的正弦信号相位差π/2, 如图2 所示。设莫尔条纹移动方向为从A 到B。A 领先B π/2, A、B 两路信号经整形后变为方波, 以1/4 个周期为单位时间, 则在一个周期内的4 个单位时间内, A 依次为1、1、0、0, B 依次为0、1、1、0, AB 代表的二进制数为10, 11, 01、00, 就是说光栅移动一个栅距内, 可以得到4 组信号, 根据不同的信号值从而将位移确定在1/4 个栅距内, 实现了4 倍细分。同时根据AB 代表的系列值可以判断移动方向。
2 CMOS 图像传感器
2.1 CMOS 图像传感器概述
根据以上对光栅传感器的剖析, 可以看出要想提高对莫尔条纹的细分精度, 可以采用提高光栅线的密度或放置更多路光敏元件实现对信号更高倍的细分的方法。但是由于工艺上的难度及成本上的限制, 不可能无限制地提高光栅线的密度, 目前较普遍的是1mm50~100 线; 也不可能精确地在保证一定的相位差下放置多路光敏元件。所以从以上两点入手试图改进光栅传感器的精度意义不大。目前的光栅传感器一般采用硅光电池, 再配以相应的后续信号处理电路完成信号处理。所以考虑采用新的图像探测器件来取代传统的光电池是另一条值得考虑的方法。
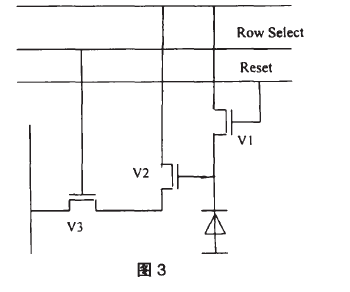
互补金属氧化物半导体( CMOS) 图像传感器与电荷耦合器件( CCD) 图像传感器目前已经得到了大量的应用。起初同CCD 相比, CMOS 图像传感器图像质量差、分辨率低、噪声降不下来和光照灵敏度不够。但是近年来随着CMOS 工艺技术的不断改善, 这些弱点已经基本克服。CMOS 的优点: 1) 集成度高。可以将驱动电路及ADC、逻辑电路接口电路等这些信号处理电路单芯片集成;2)模块体积小。更方便放置于光栅传感器内。3) 成本低.CMOS 采用标准生产工艺, 而CCD 传感器需要专用生产流程, 成本远高于CMOS。4) 单电压。CMOS 使用单一电压。CCD 系统需要多个电压, 意味着多个电源和电压调节电路。5) 低功耗。两者的结构、原理决定了CMOS 的功耗远低于CCD, 通常差1~2 个数量级。综合以上特点, 决定了对于光栅传感器的应用来说, CMOS 更适于作为光电转换器件完成对莫尔条纹的检测。CMOS 图像传感器, 根据像敏单元的不同, 分为三大类, 即CMOS- PPS、CMOS- APS、和CMOS- DPS( Digital Pixel sensor) 。PPS 由于读出噪声大, 目前基本已被淘汰。CMOS- DPS 是最近两年才开发出来的。APS 是目前主要应用的结构, 包括若干晶体管, 起到了信号放大作用, 从而降低了噪声, 其原理图如图3所示。
2.2 CMOS 图像传感器对莫尔条纹的检测
下面以OV9640 为例介绍CMOS图像传感器原理。OV9640 是CMOS 领域内著名的OmniVision 公司生产的135 万像素(1312 ×1036) 、1/ 2 英寸的CMOS 图像传感芯片,它采用SXGA/ VGA 格式, 内部功能结构如图4 所示。
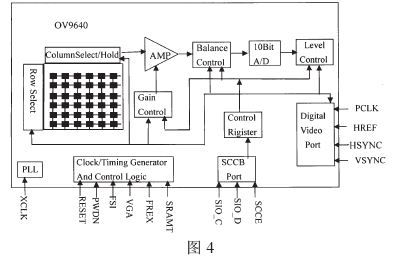
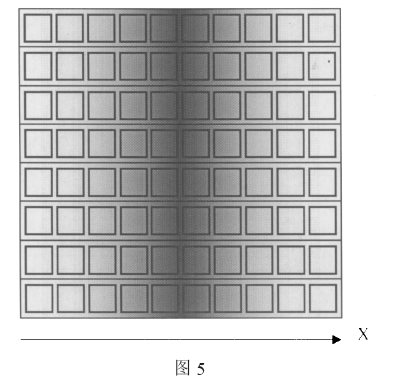
每个像敏单元都有在行列方向上的地址, 行选通逻辑和列选通逻辑共同选定某像敏单元, 该单元送到所属列对应的列AMP 进行放大, 再经10bitA/D转换后, 送到数字视频接口输出。考虑到各像敏单元的偏置电压不均匀, 使用增益控制和平衡控制等辅助电路对信号进行校正。特别是对于处于莫尔条纹光强波谷处的像敏单元, 其信号是微弱的, 此时该校正是很必须的。内部寄存器的值可以通过OV9640芯片上提供的SCCB 串行控制总线接口来存取。定时产生器和控制逻辑确定信号读出模式、光电二极管积分时间等。工作时, 莫尔条纹投射在CMOS 传感器表面, 莫尔条纹沿X 轴向左或向右平移, 如图5 所示。
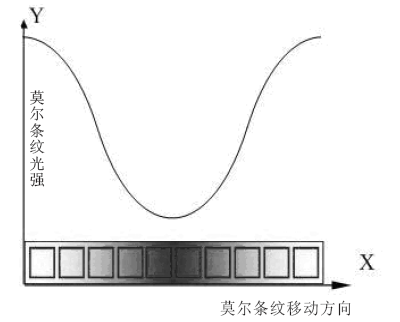
从理论上说CMOS 图像传感器上同一列像元从上至下的光强分布是一致的, 莫尔条纹的光强分布只是体现在行方向上, 所以无需进行逐行扫描, 只需考察一行上的像元信号即可分析莫尔条纹的移动情况, 这样大大降低了信号处理任务。图6 代表莫尔条纹在一行像敏单元上的光强分布, X 轴为莫尔条纹移动方向, Y 轴表示光强的大小。莫尔条纹在各行分布一致的情况仅仅是理想的情况, 实际上由于光栅线质量, 光栅间隙等工艺因素的影响, 各行情况会略有差别, 所以可以考虑选择不同的位置的几行, 考察其光强分布情况, 避免信号质量差时过大的单行误差, 达到降低误差的目的。
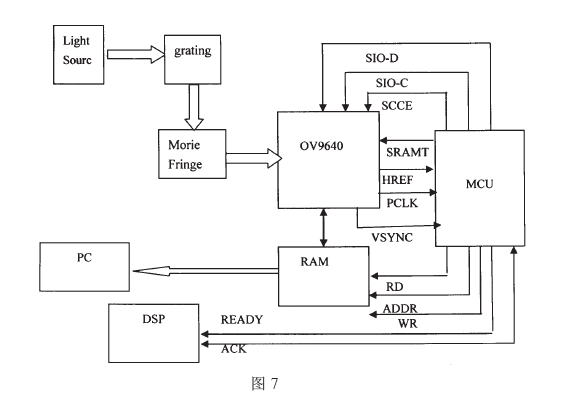
OV9640 和光栅传感器, DSP, MCU, PC 组成一测量系统时, 系统工作原理框图如下:系统上电后, CMOS 图像传感器初始化, 根据相关寄存器值控制有关参数, 确定采集图像的窗口位置, 大小和工作模式。MCU 通过OV9640 芯片上提供的SCCB 串行控制总线接口的SCCE、SIO- C、SIO- D三根线来存取寄存器值, 从而完成参数的配置。系统配置完后, 对莫尔条纹信号的采集开始。OV9120 输出同步信号给MCU, 其包括垂直同步信号VSYNC、水平同步信号HREF、数据同步信号PCLK, 判别一帧图像数据的开始和结束。DSP 发出读信号请求后, MCU 根据同步信号决定是否开始数据采集。采集的数据被送SRAM。DSP 接收到READY 信号后开始采集数据并处理。数据最终被送往PC 进行处理, 得出位移结果。
3 结论
从信号处理的角度来说, 最简单就是通过调整光栅夹角, 使莫尔条纹间隔B 和CMOS 图像传感器最大感知图像的行方向长度一致。设其为L, 该方向有n 个像素, 将L 分为n 份, 即细分倍数达到n倍, 对位移的分辨精度达到了W/n,以OV9640 为例其分辨率为(1312 ×1036)。设光栅线密度为100 线/mm, W=0.01mm, 故位移分辨精度为:W/n=0.01/1312= 7nm。当然, 这是个理论值, 考虑到光栅线质量问题等等, 这个值并不代表整个传感器在实际测量中能达到的精度。但是至少这表明了采用CMOS 图像传感器对莫尔条纹的分辨精度远远高于采用传统的硅光电池和整形细分电路等对莫尔条纹的分辨精度。随着集成电路技术的提高, CMOS 图像传感器的性能指标也在不断的改善, 对莫尔条纹的分辨率将不断提高, 在这方面足够满足光栅传感器现在和未来的需求并且绰绰有余。只要提供的莫尔条纹信号质量足够高, 那么完全可以实现纳米级的测量精度。















 5466
5466

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









