







- 课题介绍
车牌图像识别系统是现代智能交通管理的重要组成部分之一。车牌识别系统使车辆管理更智能化,数字化,有效提升了交通管理的方便性和有效性。
车牌识别系统主要包括了图像采集、图像预处理、车牌定位、字符分割、字符识别等五大核心部分。本文主要介绍图像预处理、车牌定位、字符分割三个模块的实现方法。其中图像预处理模块是将图像灰度化和用Roberts算子进行边缘检测。车牌定位和分割采用的是利用数学形态法来确定车牌位置,再利用车牌彩色信息的彩色分割法来完成车牌部位分割。字符的分割采用的方法是以二值化后的车牌部分进行垂直投影,然后在对垂直投影进行扫描,从而完成字符的分割。最后使用MATLAB软件环境进行字符分割的仿真实验,结果表明该方法具有良好的性能。
- 车牌图像识别研究的背景
现代社会已进入信息时代,随着计算机技术、通信技术和计算机网络技术的发展,自动化信息处理能力和水平不断提高,作为现代社会主要交通工具之一的汽车在人们的生产生活的各个领域得到大量使用,对他的信息进行自动采集和管理具有十分重要的意义,成为信息处理技术的一项重要研究课题。
此外,智能交通系统,简称ITS(Intelligent Traffic System)已成为现代社会道路交通发展趋势。只能交通系统,是在当代科学技术高速发展的背景下产生的。其目标在于将现金的计算机处理技术、数据通信技术、自动控制技术等综合应用于地面交通管理体系,从而建立起一种高效、准确、实时的交通管理系统。公路交通基础建设的不断发展和车辆管理体制的不断完善,为以视觉监控为基础的智能交通系统的实际应用打下了良好基础。
在智能交通系统中,车牌图像自动识别系统是一个非常重要的发展方向。车牌自动识别系统简称ALPRS或LPRS,该系统可以对车辆进行自动登记、验证、监视、报警。系统应用场合包括:高速公路,桥梁,隧道等收费管理系统。城市交通车辆管理,智能小区、智能停车场管理,车牌验证,车流统计等。同时,汽车牌照自动识别的基本方法还可以应用到其他检测和识别领域,所以车牌自动识别问题已成为现代交通工程领域中研究的重点和热点问题之一。
车牌识别系统是一项科技含量很高的多种技术结合的产品,主要有计算机视觉、数字图像处理、数字视频处理、模式识别等技术组成。也是智能交通系统的核心技术,产生于60年代。在80年代,由于城市交通问题日益严重,美国和欧洲许多国家投入了大量的人力和物力,建立了自动化高速公路网,安装了摄像、雷达探测系统和光纤网络,建立智能交通系统。在美国、欧洲、日本等发达国家的带动下,世界各国也开始建立智能交通系统。由于公路车流量日益增大、道路交通日益拥挤,车辆管理相对越来越困难,因此各个发达国家和发展中国家都在积极建设适应未来交通运输需求的智能交通系统
三、车牌识别系统设计原理概述
一个完整的车牌图像识别系统要完成图像采集到字符识别输出,总体分为硬件部分和软件部分。硬件部分包括系统的触发,图像的采集,图像的传输;软件部分包括图像预处理,车牌在图像中的位置提取,字符分割,字符识别几个部分,一个车牌识别系统的结构如图2-1所示。
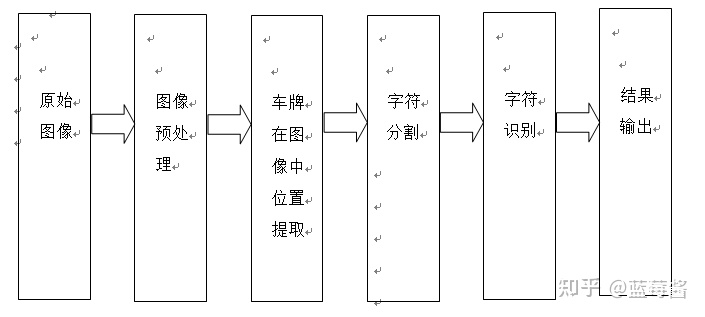
图2-1 车牌图像识别系统原理基本框图
原始图像:由停车场固定彩色摄像机、数码相机或其他扫描装置拍摄到的图像。
图像预处理:对动态采集到的图像进行滤波,边界增强等处理以克服图像处理。
车牌在图像中的位置提取:通过运算得到图像的边缘,再计算边缘图像的投影面积,寻找谷峰点以大概确定车牌的位置,再计算连通域的宽高比,剔除不在阈值范围内的连通域,最后便得到了车牌区域。
字符分割:利用投影检测的字符定位分割方法得到单个的字符。
字符识别:利用模板匹配的方法与数据库中的字符进行匹配从而确认出字符。
输出结果:得到最后的汽车牌照,包括汉字、字母和数字。
3.1 车牌在图像中的位置提取
自然环境下,由于汽车图像背景复杂、光照不均匀等原因,如何在自然背景中准确地确定牌照区域是整个识别过程的关键。一般采用的方案是首先对采集到的视频图像进行大范围相关搜索,找到符合汽车牌照特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为牌照区域,并将其从图像中分割出来。通过以上步骤,牌照一般能够被定位。
3.2 字符分割
在完成牌照区域的定位后,还需要将牌照区域分割成单个字符,然后进行字符识别,最后输出结果。字符分割一般采用垂直投影法。垂直投影法的原理是由于字符在垂直方向上的投影必然在字符间或字符内的间隙处取得局部最小值的附近,并且这个位置应满足牌照的字符书写格式、字符、尺寸限制和一些其他条件。所以利用垂直投影法对复杂环境下的汽车图像的字符分割有较好的效果。
3.3 字符识别
字符识别方法目前主要得算法有以下几种:
第一种模板匹配字符识别算法,具体描述如下:
模板匹配字符识别算法的实现方法是计算输入模式与样本之间的相似性,取相似性最大的样本为输入模式所属类别。该方法识别速度快,但是对噪点比较敏感。在实际应用中,为了提高正确率往往需要使用大的模 板或多个模板进行匹配,处理时间则随着模板的增大以及模板个数的增加而增加。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









