






目标检测概述
理论界:希望性能好
工业界:希望运行速度快(YOLO、SSD用的多)
Cascade R-CNN既可以目标检测也可以图像分割
CV领域的相对区别:
图像分类(lmage Classification)的目标是识别出图中出现的物体类别是什么,其功能主要是用于判断是什么?(VGG,GooGle Net, ResNet)
图像定位(Object Location)的目标不仅仅需要识别出是什么物体(即分类),同时需要预测物体的位置信息,也就是单个目标在哪里?是什么?(RCNN, Fast RCNN,Faster RCNN)
目标检测(Object Detection)实质上上多目标的定位,即在一个图片中定位多个目标物体,包括分类和定位,也就是多个目标分别在哪里?分别那个类别?(RCNN, Fast RCNN,Faster RCNN,YOLO,SSD)
- 类别标签(Categor Label)
- 位置(最小外接矩形/ Bounding Box)
二阶段算法
R-CNN、Fast R-CNN, Faster-R-CNN, SPP-Net、R-FCN
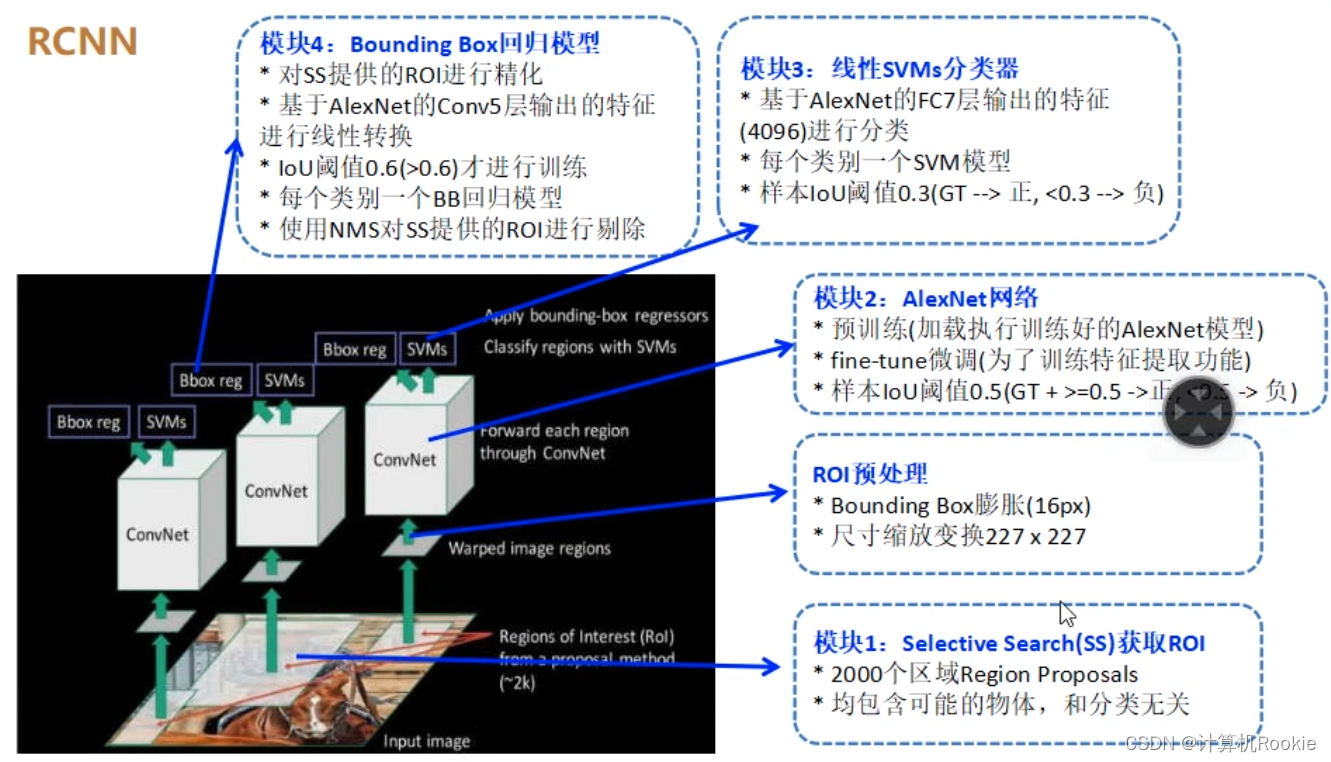
R CNN:
SPP-Net:
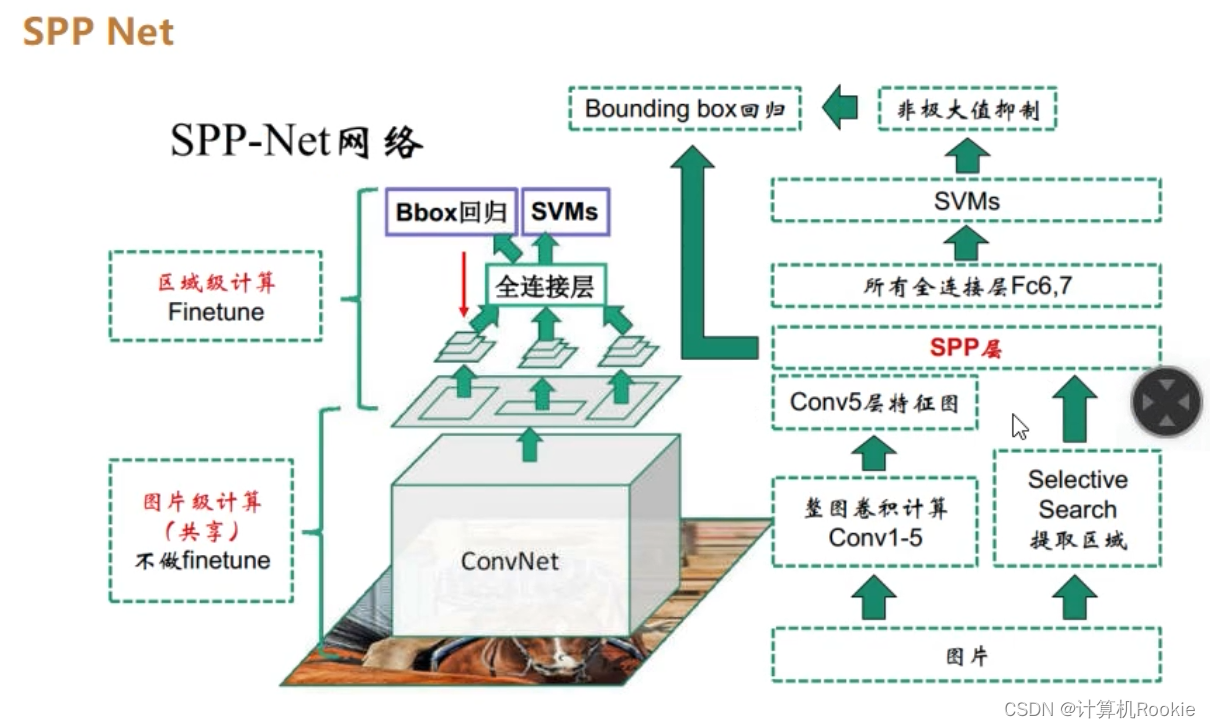
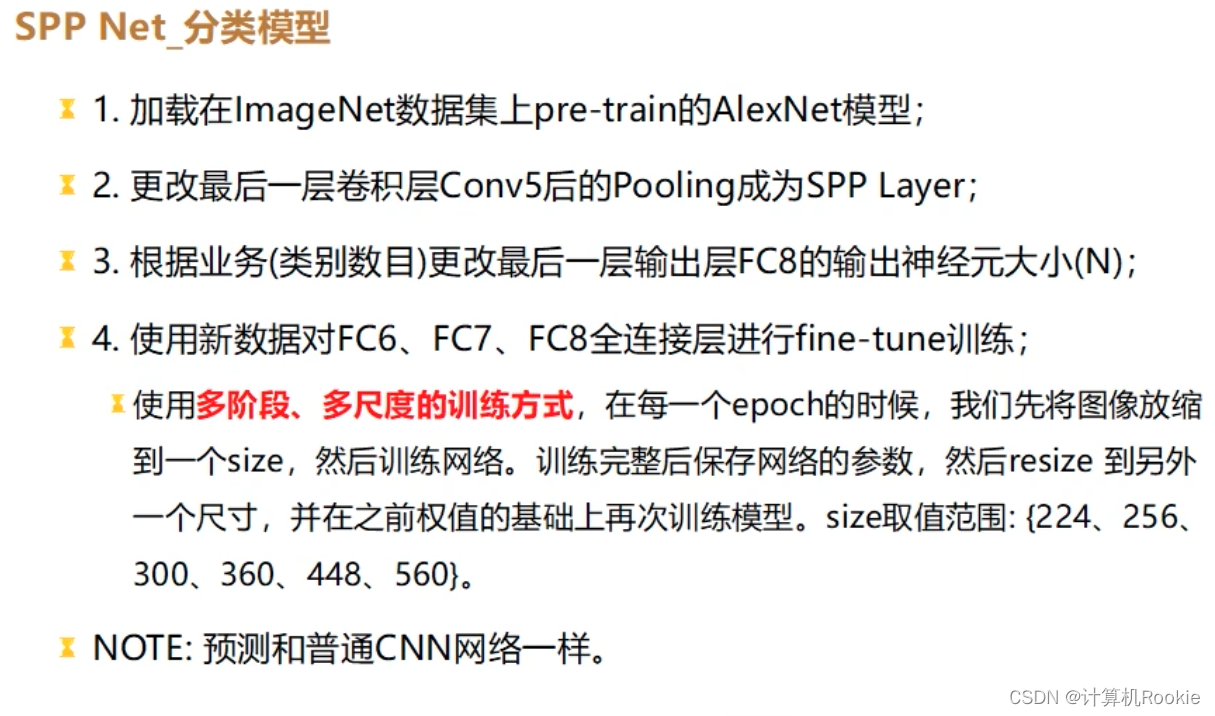
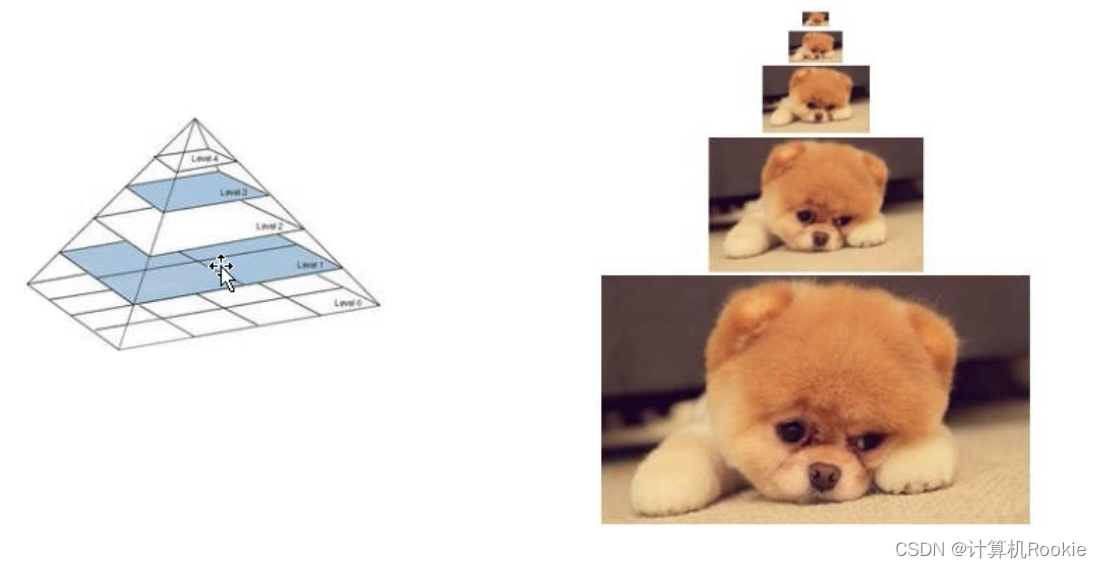
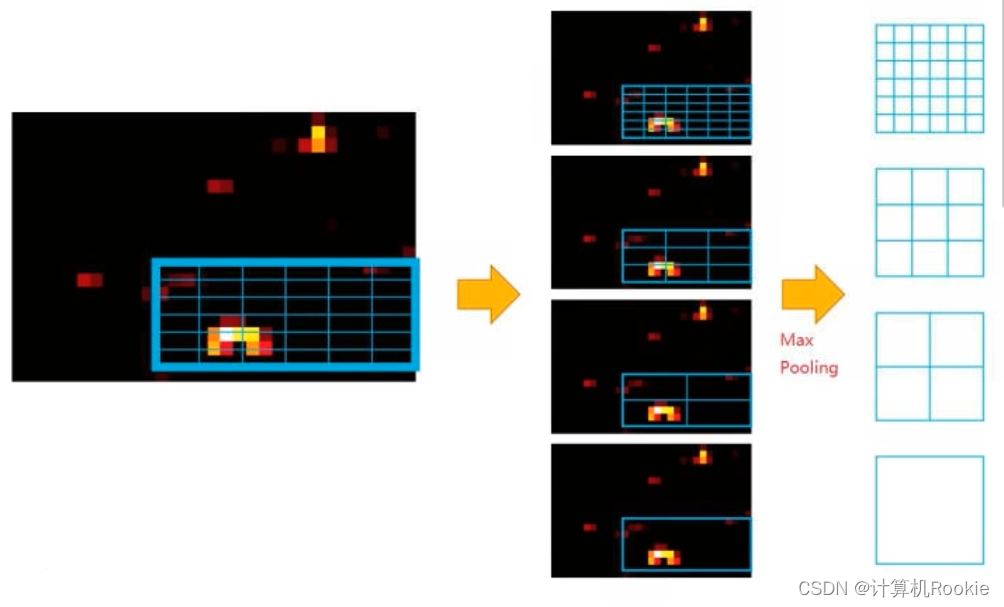
SPP空间金字塔层:
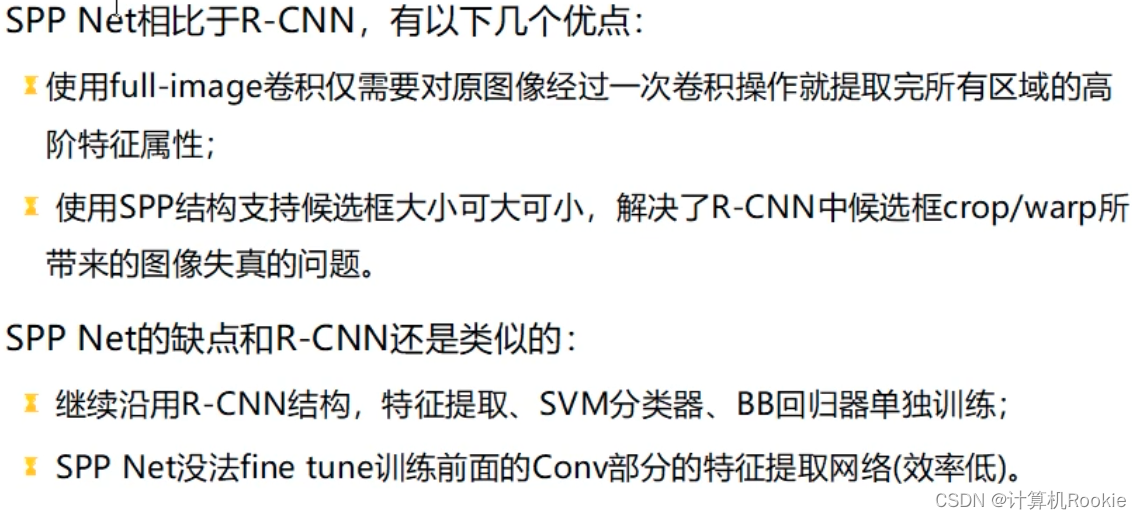
SPP和 R-CNN的对比:

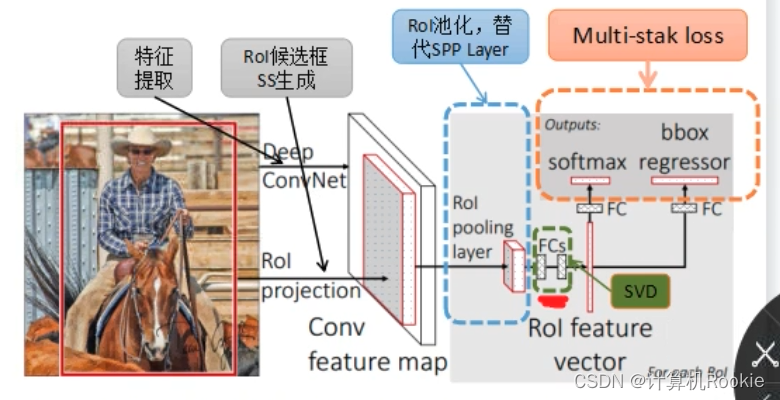
Fast R-CNN:
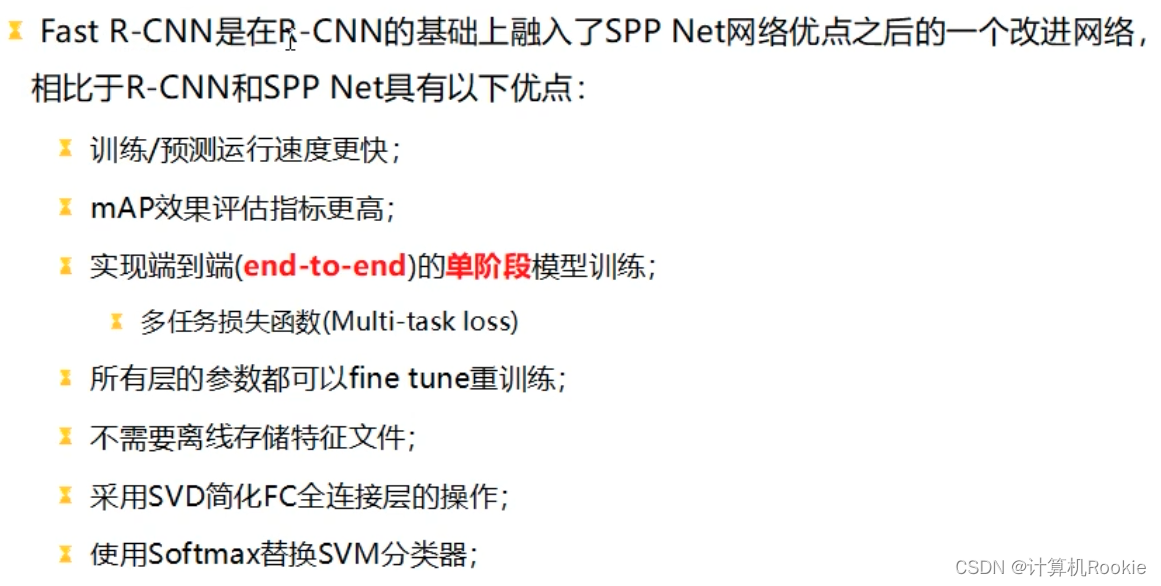
Fast R-CNN引入的三种新技术:
Rol Pooling Layer
Multi-task loss
SVD
一阶段算法
YOLO、SSD


























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









