









一、具体内容
1.方块/棋盘格的渲染和方块向下移动
学生可以通过层级建模( 实验补充1和2)的方式建立多个虚拟物体,由多个虚拟物体组成一个虚拟场景,要求在程序中显示该虚拟场景,场景可以是室内或者室外场景;场景应包含地面。
2.添加纹理
参考实验4.1,为场景中至少两个主要物体添加纹理贴图 。
3.添加光照、材质、阴影效果
参考实验3.3和实验3.4,实现光照效果、材质、阴影等。
4.用户交互实现视角切换完成对场景的任意角度浏览
参考实验3.1,完成相机变换。
5.通过交互控制物体
参考实验2.3,实现物体的变换,允许用户通过键盘或者鼠标实现场景中至少两个物体的控制(移动,旋转,缩放等等)。
1.模型绘制截图
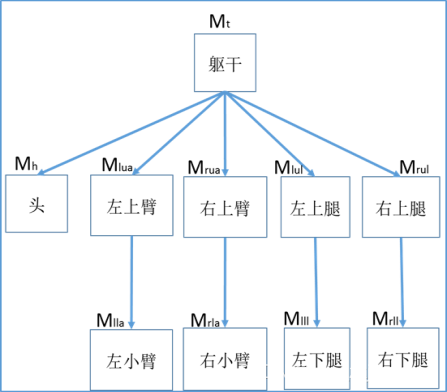
2.模型的层次结构框图
3.鼠标和键盘的具体交互用法
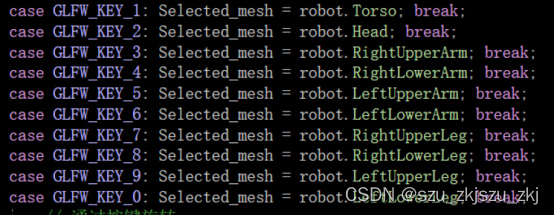
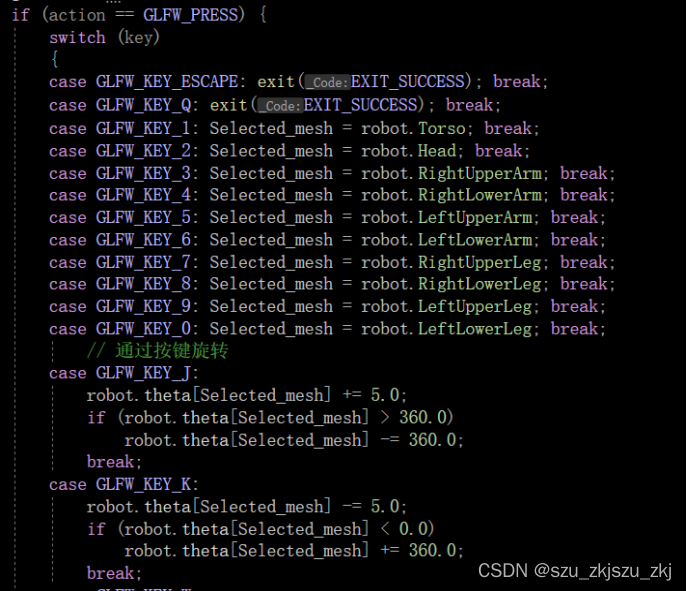
首先是机器人的机械臂运动操控 键盘0-9键分别用来指定某个模块 与下面截图一一对应
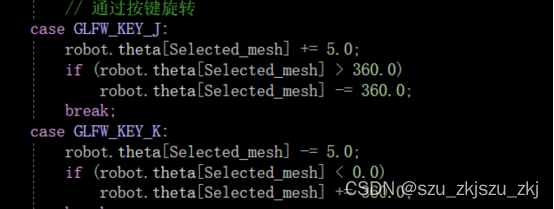
J和K键分别对某个机械臂进行两个方向的旋转
控制角色移动
键盘的W S A D键分别用来操控机器人前后左右移动 同时机器人会往相应方向旋转
向左
向右
按键M可以让机器人的双脚自动前后摆动

按键z可以让机器人的头自动旋转

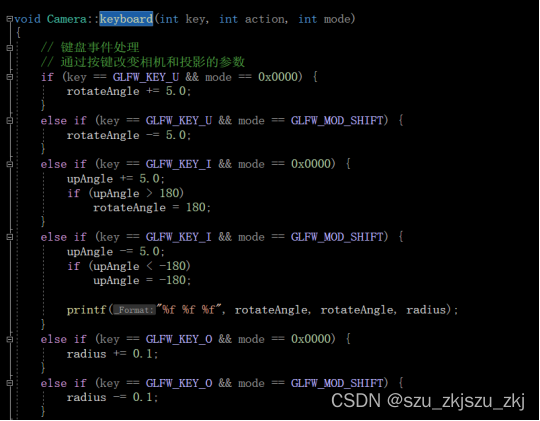
相机类的键盘:
键盘的U I O键分别用来操控相机的旋转角,俯仰角和半径的增加,同时按下shift键则减少相应数值
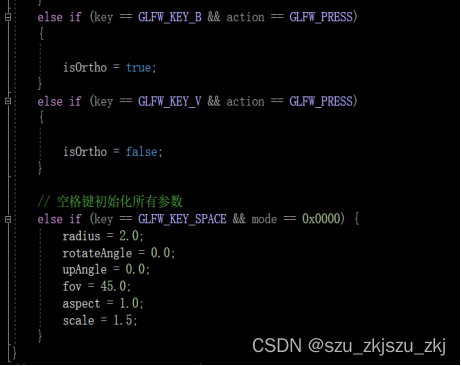
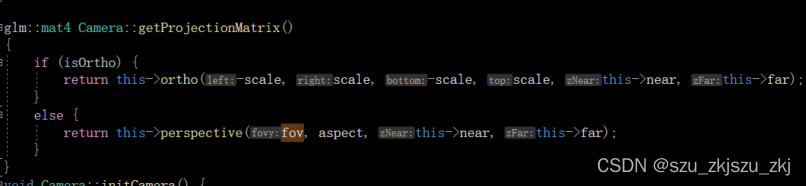
正交投影和透视投影切换 按下B键则是正交模式 V键则是透视模式


鼠标操作
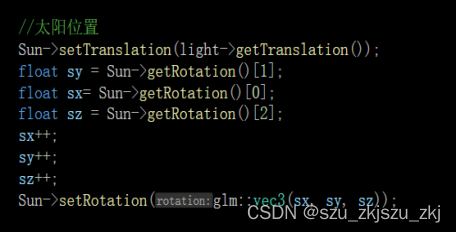
点击鼠标左键实现光源位置的变动 即图中的太阳会根据鼠标的点击位置而跑到相应地方

通过滑动滚轮实现透视投影的视野缩放 向下滑时距离变远 向上滑时距离变近
下图为扯到最远的视觉效果

下图为较近距离的视觉效果

二、实验过程
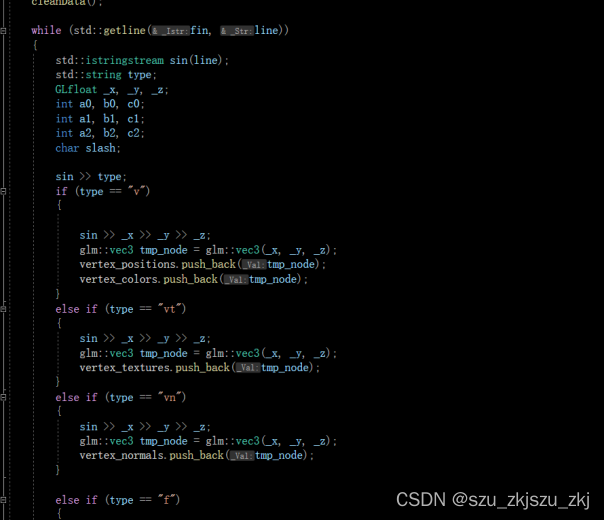
1.读取纹理和obj文件
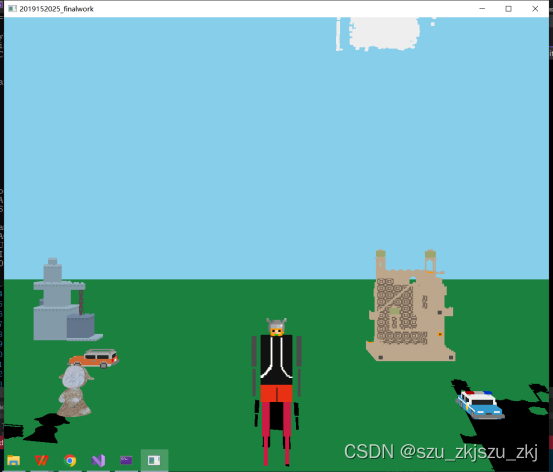
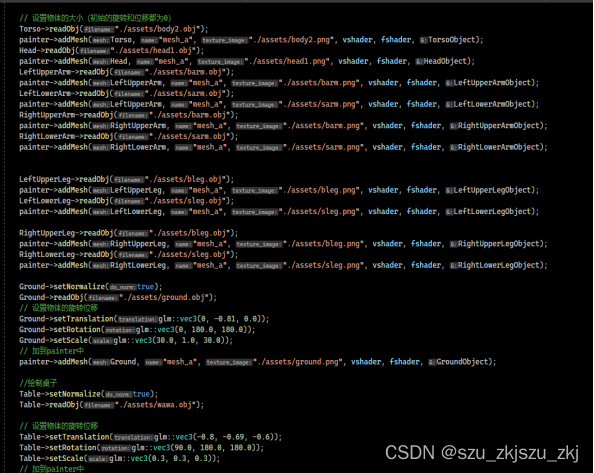
首先对场景中各个物体的obj文件进行读取,场景中的物体有太阳,云朵,房子,车,机器人,娃娃等等
Readobj函数主要代码
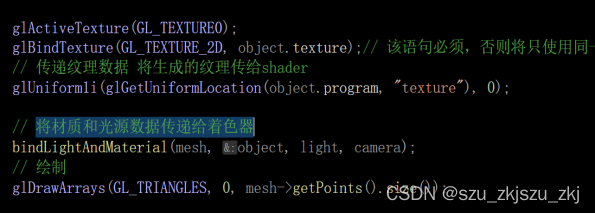
在addmesh函数中传入纹理图片并绘制

传递纹理数据
读取纹理图片
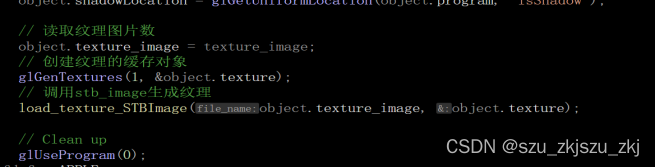
存储纹理数据
最后在init函数里面调用读取obj文件和纹理图片对物体进行绘制
运行结果展示


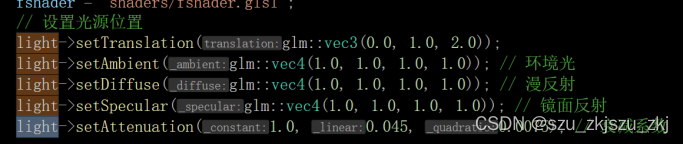
光源
光源类使用的是最基础的光源类
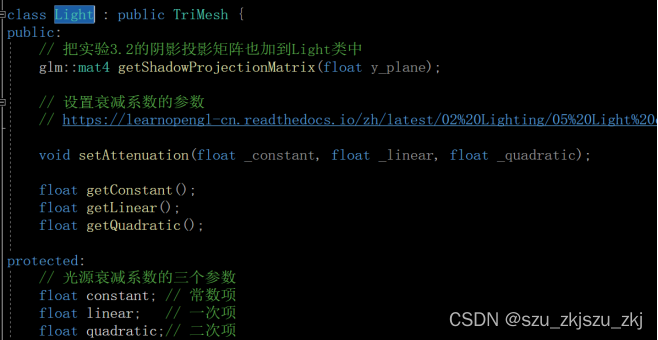
光源参数设置
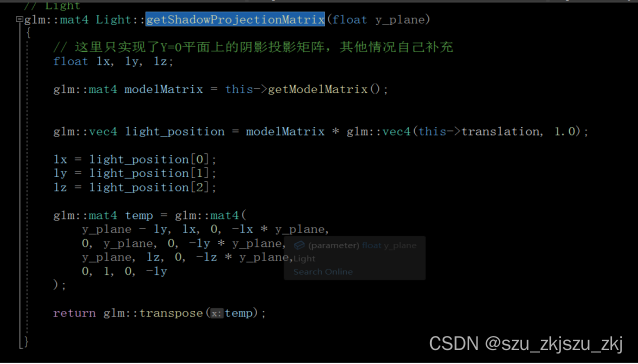
阴影
阴影投影矩阵获取

阴影的绘制
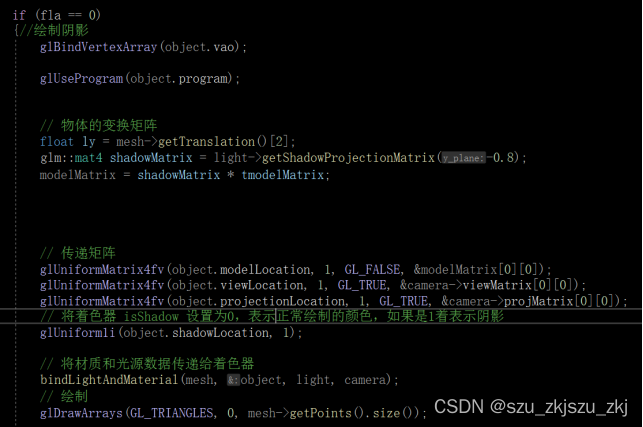
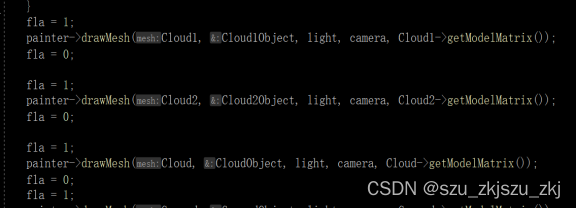
这里设置了一个fla全局变量 当fla为0时绘制阴影 为1时不绘制 当一个物体不需要阴影的时候就在调用drawMesh函数前将其设置为1 调用后后再设置为0
键盘交互操作
参考补充实验2 对机器人通过键盘0-9实现层级建模各个骨骼的旋转
相机类中的键盘
实现不同角度的相机位置以及相机视角和范围切换
正交投影和透视投影切换
正交投影vs透视投影效果如下:


鼠标操作
点击鼠标左键实现光源位置的变动

太阳位置也会随之变动 并且实现了一个太阳自转

通过滑动滚轮实现透视投影的视野缩放
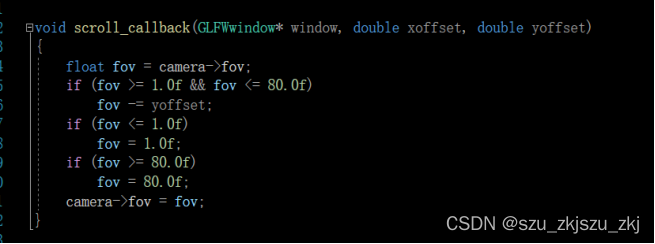
fov变量定义了我们可以看到场景中多大的范围
最后调用键盘鼠标回调函数

角色移动
角色移动包括前面太阳的移动以及机器人的移动
键盘操作机器人前后左右移动以及头部旋转
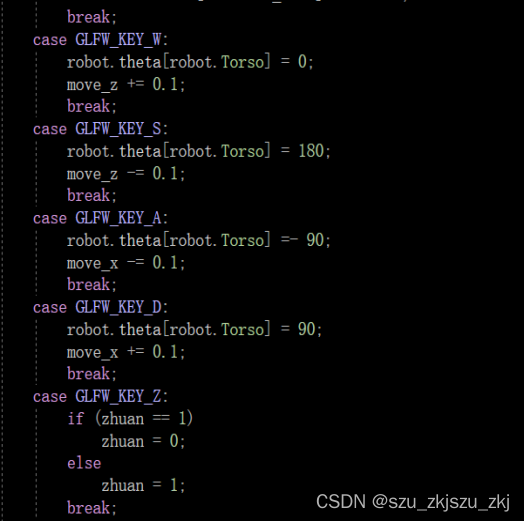
新增两个变量move_x和move_z通过增加move_x和move_z的数值来实现机器人位置的变动

然后通过改变theta值来改变机器人转向
双脚自动摆动
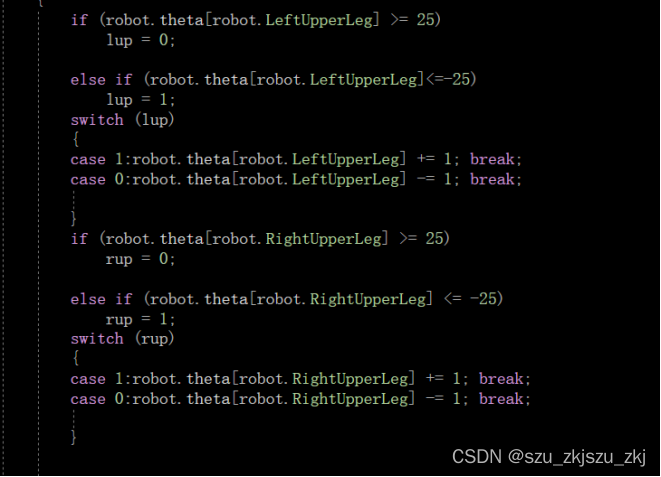
首先设置一个全局变量ismove,当其为1时,开始摆动。lup1表示其左臂正在向上摆动,即机械臂角度正在递增,此时将其角度+1,继续向上摆动,而当lup0时,表示右臂正在向下摆动,机械臂角度正在递减,此时将其角度-1,继续向下摆动,而当其角度大于等于25度或小于等于25度时,就将其分别设置为下摆和上摆。右臂同理,就实现了自动摆动。
















 1129
1129











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









