










估计很多项目多基于效率的原因需要实现自己的RingBuffer.
在通信程序中,经常使用环形缓冲区作为数据结构来存放通信中发送和接收的数据。环形缓存区是一个先进先出的循环缓冲区,可以向通信程序提供对缓冲区的互斥访问。
1、环形缓冲区的实现原理
环形缓冲区通常有一个读指针和一个写指针。读指针指向环形缓冲区中可读的数据,写指针指向环形缓冲区中可写的缓冲区。通过移动读指针和写指针就可以实现缓冲区的数据读取和写入。在通常情况下,环形缓冲区的读用户仅仅会影响读指针,而写用户仅仅会影响写指针。如果仅仅有一个读用户和一个写用户,那么不需要添加互斥保护机制就可以保证数据的正确性。如果有多个读写用户访问环形缓冲区,那么必须添加互斥保护机制来确保多个用户互斥访问环形缓冲区。
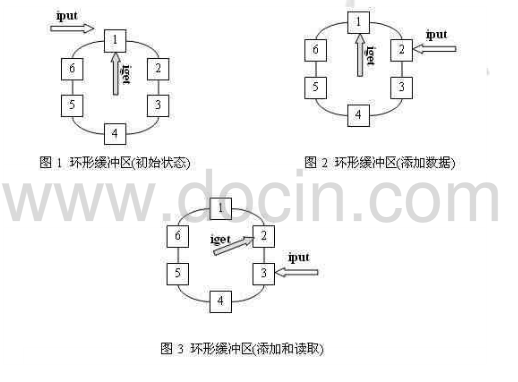
图1、图2和图3是一个环形缓冲区的运行示意图。图1是环形缓冲区的初始状态,可以看到读指针和写指针都指向第一个缓冲区处;图2是向环形缓冲区中添加了一个数据后的情况,可以看到写指针已经移动到数据块2的位置,而读指针没有移动;图3是环形缓冲区进行了读取和添加后的状态,可以看到环形缓冲区中已经添加了两个数据,已经读取了一个数据。
个数据。
2、实例:环形缓冲区的实现
环形缓冲区是数据通信程序中使用最为广泛的数据结构之一,下面的代码,实现了一个环形缓冲区:
/*ringbuf .c*/
#include<stdio. h>
#include<ctype. h>
#define NMAX 8
int iput = 0; /* 环形缓冲区的当前放入位置 */
int iget = 0; /* 缓冲区的当前取出位置 */
int n = 0; /* 环形缓冲区中的元素总数量 */
double buffer[NMAX];
/* 环形缓冲区的地址编号计算函数,如果到达唤醒缓冲区的尾部,将绕回到头部。
环形缓冲区的有效地址编号为:0到(NMAX-1)
*/
int addring (int i)
{
return (i+1) == NMAX ? 0 : i+1;
}
/* 从环形缓冲区中取一个元素 */
double get(void)
{
int pos;
if (n>0){
Pos = iget;
iget = addring(iget);
n--;
return buffer[pos];
}
else {
printf(“Buffer is empty\n”);
return 0.0;
}
/* 向环形缓冲区中放入一个元素*/
void put(double z)
{
if (n<NMAX){
buffer[iput]=z;
iput = addring(iput);
n++;
}
else
printf(“Buffer is full\n”);
}
int main{void)
{
chat opera[5];
double z;
do {
printf(“Please input p|g|e?”);
scanf(“%s”, &opera);
switch(tolower(opera[0])){
case ‘p’: /* put */
printf(“Please input a float number?”);
scanf(“%lf”, &z);
put(z);
break;
case ‘g’: /* get */
z = get();
printf(“%8.2f from Buffer\n”, z);
break;
case ‘e’:
printf(“End\n”);
break;
default:
printf(“%s - Operation command error! \n”, opera);
}/* end switch */
}while(opera[0] != ’e’);
return 0;
}
在CAN通信卡设备驱动程序中,为了增强CAN通信卡的通信能力、提高通信效率,根据CAN的特点,使用两级缓冲区结构,即直接面向CAN通信卡的收发缓 冲区和直接面向系统调用的接收帧缓冲区。 通讯中的收发缓冲区一般采用环形队列(或称为FIFO队列),使用环形的缓冲区可以使得读写并发执行,读进程和写进程可以采用“生产者和消费者”的模型来 访问缓冲区,从而方便了缓存的使用和管理。然而,环形缓冲区的执行效率并不高,每读一个字节之前,需要判断缓冲区是否为空,并且移动尾指针时需要进行“折行处理”(即当指针指到缓冲区内存的末尾时,需要新将其定向到缓冲区的首地址);每写一个字节之前,需要判断缓区是否为,并且移动尾指针时同样需要进行“ 折行处理”。程序大部分的执行过程都是在处理个别极端的情况。只有小部分在进行实际有效的操作。这就是软件工程中所谓的“8比2”关系。结合CAN通讯实际情况,在本设计中对环形队列进行了改进,可以较大地提高数据的收发效率。 由于CAN通信卡上接收和发送缓冲器每次只接收一帧CAN数据,而且根据CAN的通讯协议,CAN控制器的发送数据由1个字节的标识符、一个字节的RTR 和DLC位及8个字节的数据区组成,共10个字节;接收缓冲器与之类似,也有10个字节的寄存器。所以CAN控制器收的数据是短小的定长帧(数据可以不满 8字节)。 于是,采用度为10字节的数据块业分配内存比较方便,即每次需要内存缓冲区时,直接分配10个字节,由于这10个字节的地址是线性的,故不需要进行“折行”处理。更重要的是,在向缓冲区中写数据时,只需要判断一次是否有空闲块并获取其块首指针就可以了,从而减少了重复性的条件判断,大大提高了程序的执行效率;同样在从缓冲队列中读取数据时,也是一次读取10字节的数据块,同样减少了重复性的条件判断。 在CAN卡驱动程序中采用如下所示的称为“Block_Ring_t”的数据结构作为收发数据的缓冲区:
typedef struct {
long signature;
unsigned char *head_p;
unsigned char *tail_p;
unsigned char *begin_p;
unsigned char *end_p;
unsigned char buffer [BLOCK_RING_BUFFER_SIZE];
int usedbytes;
}Block_Ring_t;
该数据结构在通用的环形队列上增加了一个数据成员usedbytes,它表示当前缓冲区中有多少字节的空间被占用了。使用usedbytes,可以比较方 便地进行缓冲区满或空的判断。当usedbytes=0时,缓冲区空;当usedbytes=BLOCK_RING_BUFFER_SIZE时,缓冲区 满。 本驱动程序除了收发缓冲区外,还有一个接收帧缓冲区,接收帧队列负责管理经Hilon A协议解包后得到的数据帧。由于有可能要同接收多个数据帧,而根据CAN总线遥通信协议,高优先级的报文将抢占总线,则有可能在接收一个低优先级且被分为 好几段发送的数据帧时,被一个优先级高的数据帧打断。这样会出现同时接收到多个数据帧中的数据包,因而需要有个接收队列对同时接收的数据帧进行管理。 当有新的数据包到来时,应根据addr(通讯地址),mode(通讯方式),index(数据包的序号)来判断是否是新的数据帧。如果是,则开辟新的 frame_node;否则如果已有相应的帧节点存地,则将数据附加到该帧的末尾;在插入数据的同时,应该检查接收包的序号是否正确,如不正确将丢弃这包 数据。 每次建立新的frame_node时,需要向frame_queue申请内存空间;当frame_queue已满时,释放掉队首的节点(最早接收的但未完 成的帧)并返回该节点的指针。 当系统调用读取了接收帧后,释放该节点空间,使设备驱动程序可以重新使用该节点。
形缓冲区:环形缓冲队列学习
来源: 发布时间:星期四, 2008年9月25日 浏览:117次 评论:0
项目中需要线程之间共享一个缓冲FIFO队列,一个线程往队列中添数据,另一个线程取数据(经典的生产者-消费者问题)。开始考虑用STL的vector 容器, 但不需要随机访问,频繁的删除最前的元素引起内存移动,降低了效率。使用LinkList做队列的话,也需要频繁分配和释放结点内存。于是自己实现一个有 限大小的FIFO队列,直接采用数组进行环形读取。
队列的读写需要在外部进程线程同步(另外写了一个RWGuard类, 见另一文)
到项目的针对性简单性,实现了一个简单的环形缓冲队列,比STL的vector简单
PS: 第一次使用模板,原来类模板的定义要放在.h 文件中, 不然会出现连接错误。
template <class _Type>
class CShareQueue
{
public:
CShareQueue();
CShareQueue(unsigned int bufsize);
virtual ~CShareQueue();
_Type pop_front();
bool push_back( _Type item);
//返回容量
unsigned int capacity() { //warning:需要外部数据一致性
return m_capacity;
}
//返回当前个数
unsigned int size() { //warning:需要外部数据一致性
return m_size;
}
//是否满//warning: 需要外部控制数据一致性
bool IsFull() {
return (m_size >= m_capacity);
}
bool IsEmpty() {
return (m_size == 0);
}
protected:
UINT m_head;
UINT m_tail;
UINT m_size;
UINT m_capacity;
_Type *pBuf;
};
template <class _Type>
CShareQueue<_Type>::CShareQueue() : m_head(0), m_tail(0), m_size(0)
{
pBuf = new _Type[512];//默认512
m_capacity = 512;
}
template <class _Type>
CShareQueue<_Type>::CShareQueue(unsigned int bufsize) : m_head(0), m_tail(0)
{
if( bufsize > 512 || bufsize < 1)
{
pBuf = new _Type[512];
m_capacity = 512;
}
else
{
pBuf = new _Type[bufsize];
m_capacity = bufsize;
}
}
template <class _Type>
CShareQueue<_Type>::~CShareQueue()
{
delete[] pBuf;
pBuf = NULL;
m_head = m_tail = m_size = m_capacity = 0;
}
//前面弹出一个元素
template <class _Type>
_Type CShareQueue<_Type>::pop_front()
{
if( IsEmpty() )
{
return NULL;
}
_Type itemtmp;
itemtmp = pBuf[m_head];
m_head = (m_head + 1) % m_capacity;
--m_size;
return itemtmp;
}
//从尾部加入队列
template <class _Type>
bool CShareQueue<_Type>::push_back( _Type item)
{
if ( IsFull() )
{
return FALSE;
}
pBuf[m_tail] = item;
m_tail = (m_tail + 1) % m_capacity;
++m_size;
return TRUE;
}
#endif

















 3575
3575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









