








第八章 向量代数与空间解析几何
导言
在本章中,我们将深入探讨向量代数与空间解析几何的基本概念和应用。平面解析几何利用坐标方法将平面上的点与数对应起来,以代数方法研究几何问题。空间解析几何也采用相似的方法,但在三维空间中进行。向量代数不仅是研究空间几何的强有力工具,也是理解多元函数微积分的基础。我们将首先介绍向量的概念,探讨向量的线性运算,并最终应用这些知识来解析空间中的几何问题。
第一节 向量及其线性运算
一、向量的概念
向量是一类具有大小和方向的量,常见如位移、速度、加速度、力等。在数学中,向量通常由有向线段表示,线段的长度代表向量的大小,方向代表向量的方向。例如,以点A为起点、点B为终点的向量表示为向量AB。
在许多实际问题中,向量的起点是重要的(如速度向量取决于质点的位置)。然而,在数学分析中,为了简化问题,我们主要研究与起点无关的自由向量,即仅考虑向量的大小和方向。
如果两个向量a和b的大小和方向完全相同,即它们可以通过平行移动完全重合,那么我们认为向量a和b是相等的,记作a = b。
二、向量的基本运算和性质
1. 向量的模
向量的模是表示向量大小的量,记作|a|,例如向量AB的模记作|AB|。单位向量是模为1的向量,而零向量的模为0,记作0,它没有特定的方向。
2. 向量的夹角
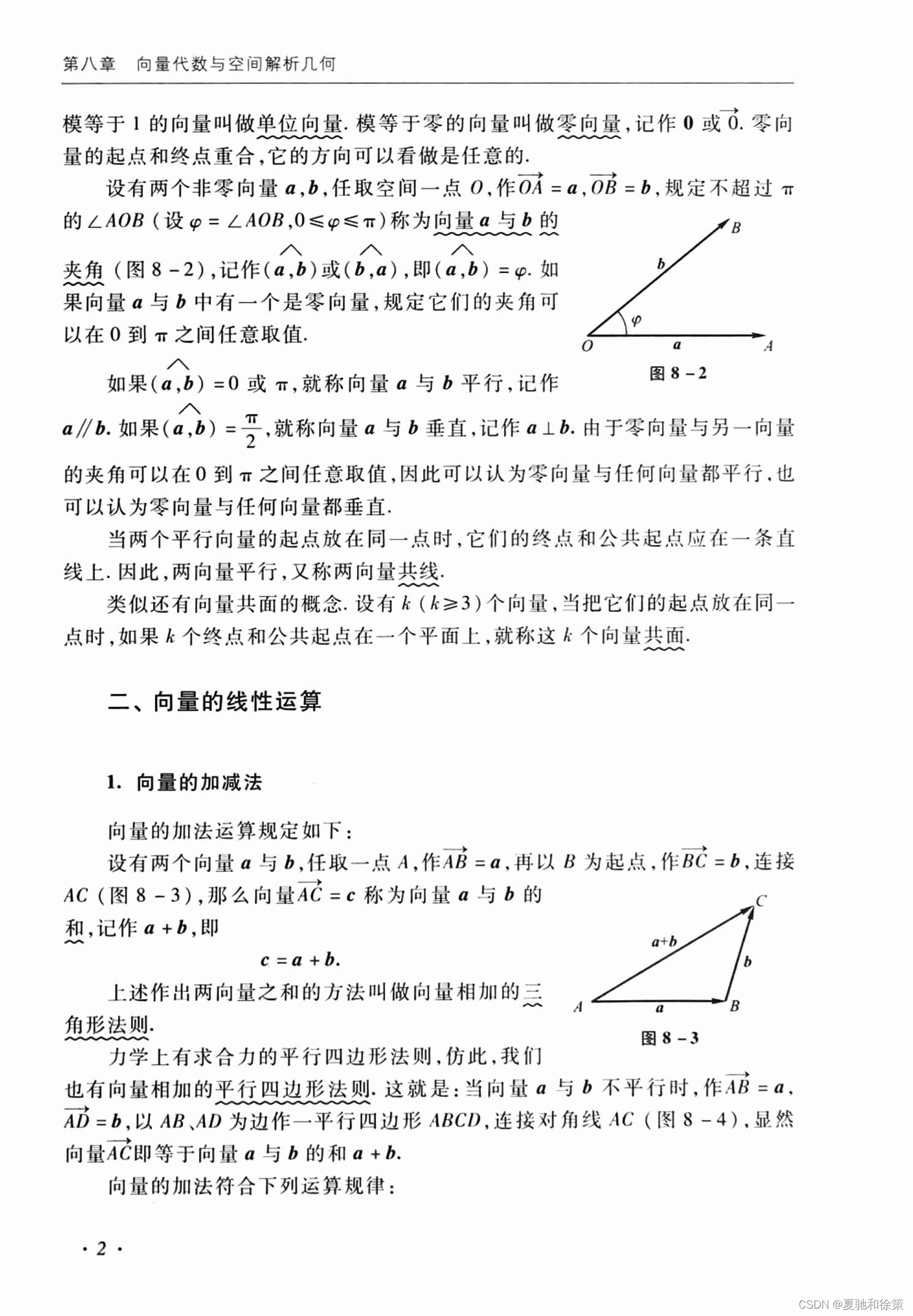
设有两个非零向量a和b,不超过π的∠AOB(设φ=∠AOB, 0≤φ≤π)称为向量a与b的夹角,记作(a, b)。如果向量之一是零向量,则它们的夹角可以任意定义从0到π之间。
3. 向量的平行与垂直
如果两个向量a和b的夹角φ=0或π,我们称这两个向量平行,记作a∥b。如果φ=π/2,则向量a与b垂直,记作a⊥b。由于零向量的夹角可任意取值,它可以认为与任何向量都平行或垂直。
4. 向量的共线与共面
当两个向量平行且它们的起点相同时,它们的终点与起点会在同一直线上,这称为向量共线。类似地,如果三个或以上的向量(起点相同)的终点与起点位于同一平面上,这些向量称为共面。
通过本章的学习,我们可以更深入地理解向量的性质和运算,为进一步探索空间几何和高级数学打下坚实的基础。
二、向量的线性运算
1. 向量的加减法
向量的加法
向量加法遵循以下规则:
三角形法则
设两个向量 𝑎a 和 𝑏b,任取一点 𝐴A,作 𝐴𝐵=𝑎AB=a,再以 𝐵B 为起点作 𝐵𝐶=𝑏BC=b。连接 𝐴𝐶AC,得到向量 𝐴𝐶=𝑐AC=c,则 𝑐c 为 𝑎a 和 𝑏b 的和,记作 𝑎+𝑏a+b,即:

这种加法方法称为向量相加的三角形法则,如图 8-3 所示。
平行四边形法则
在力学中,有求合力的平行四边形法则。类似地,在向量加法中,若两个向量 𝑎a 和 𝑏b 不平行,作 𝐴𝐵=𝑎AB=a、𝐴𝐷=𝑏AD=b,以 𝐴𝐵AB 和 𝐴𝐷AD 为边作平行四边形 𝐴𝐵𝐶𝐷ABCD。连接对角线 𝐴𝐶AC,显然向量 𝐴𝐶AC 为 𝑎a 和 𝑏b 的和 𝑎+𝑏a+b。
运算律
向量的加法满足以下规律:
- 交换律: 𝑎+𝑏=𝑏+𝑎a+b=b+a
- 结合律: (𝑎+𝑏)+𝑐=𝑎+(𝑏+𝑐)(a+b)+c=a+(b+c)
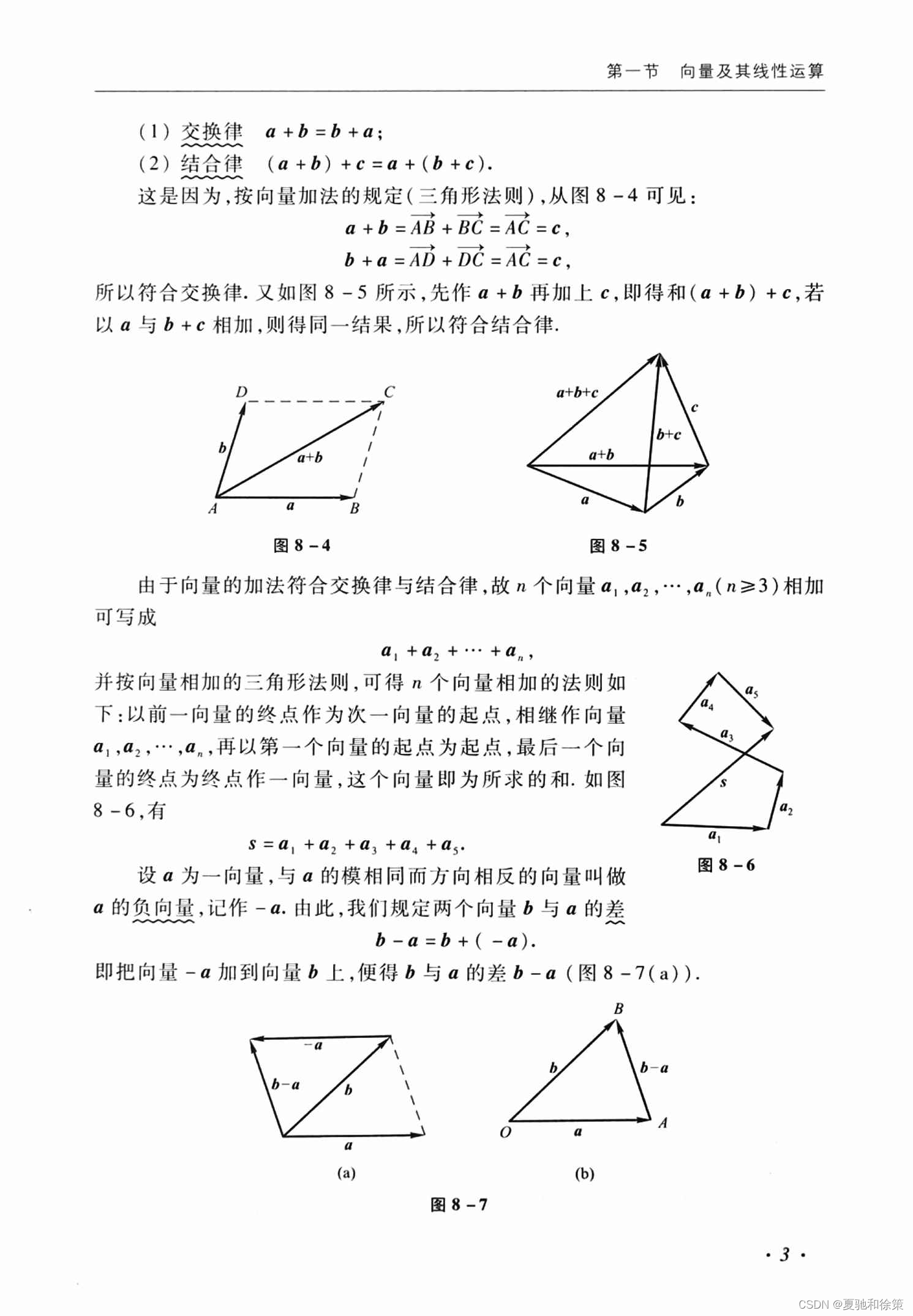
从图 8-4 可以看到,使用三角形法则:

因此,向量加法符合交换律。结合律的验证可通过图 8-5 来解释。
多个向量的加法
由于向量的加法符合交换律和结合律,因此 𝑛n 个向量 𝑎1,𝑎2,…,𝑎𝑛a1,a2,…,an(𝑛≥3n≥3)相加可表示为:
𝑎1+𝑎2+…+𝑎𝑛a1+a2+…+an
并根据三角形法则,可以推导出 𝑛n 个向量相加的规则:将前一个向量的终点作为下一个向量的起点,依次作向量 𝑎1,𝑎2,…,𝑎𝑛a1,a2,…,an,然后以第一个向量的起点为起点,最后一个向量的终点为终点,作一个向量 𝑆S,则:
𝑆=𝑎1+𝑎2+𝑎3+𝑎4+𝑎5S=a1+a2+a3+a4+a5
如图 8-6 所示。
向量的减法
设 𝑎a 为一个向量,与其模相等而方向相反的向量称为 𝑎a 的负向量,记作 −𝑎−a。向量减法的定义是:两个向量 𝑏b 和 𝑎a 的差:
𝑏−𝑎=𝑏+(−𝑎)b−a=b+(−a)
即,将向量 −𝑎−a 加到向量 𝑏b 上,得到 𝑏b 和 𝑎a 的差 𝑏−𝑎b−a,如图 8-7(a) 所示。
特别地,当 𝑏=𝑎b=a 时,有:
𝑎−𝑎=𝑎+(−𝑎)=0a−a=a+(−a)=0
显然,任取向量 𝐴𝐵AB 及点 𝑂O,则:
𝐴𝐵=𝐴𝑂+𝑂𝐵=𝑂𝐵−𝑂𝐴AB=AO+OB=OB−OA
因此,将向量 𝑎a 和 𝑏b 移到同一起点 𝑂O 时,从 𝑎a 的终点 𝐴A 指向 𝑏b 的终点 𝐵B 所构成的向量 𝐴𝐵AB 即为 𝑏b 和 𝑎a 的差 𝑏−𝑎b−a,如图 8-7(b) 所示。
向量加减法的性质
根据三角形不等式,可以得到以下关系:

其中,等号在向量 𝑎a 和 𝑏b 同向或反向时成立。
2. 向量与数的乘法
设向量 𝑎a 和实数 𝜆λ,它们的乘积记作 𝜆𝑎λa。规定 𝜆𝑎λa 为一个向量,其模和方向的计算方法如下:
- 模:∣𝜆𝑎∣=∣𝜆∣⋅∣𝑎∣∣λa∣=∣λ∣⋅∣a∣
- 方向:
- 当 𝜆>0λ>0 时,𝜆𝑎λa 与 𝑎a 同方向。
- 当 𝜆<0λ<0 时,𝜆𝑎λa 与 𝑎a 反方向。
- 当 𝜆=0λ=0 时,𝜆𝑎λa 为零向量,方向可以是任意的。
特别地,当 𝜆=±1λ=±1 时,有:
- 1𝑎=𝑎1a=a
- −1𝑎=−𝑎−1a=−a
向量与数的乘积的运算律
-
结合律:
对于任意实数 𝜆λ、𝜇μ 和向量 𝑎a,有: 𝜆(𝜇𝑎)=𝜇(𝜆𝑎)=(𝜆𝜇)𝑎λ(μa)=μ(λa)=(λμ)a这是因为根据定义,向量 𝜆(𝜇𝑎)λ(μa)、𝜇(𝜆𝑎)μ(λa) 和 (𝜆𝜇)𝑎(λμ)a 都是平行向量,且方向相同,其模都满足: ∣𝜆(𝜇𝑎)∣=∣𝜇(𝜆𝑎)∣=∣(𝜆𝜇)𝑎∣=∣𝜆𝜇∣⋅∣𝑎∣∣λ(μa)∣=∣μ(λa)∣=∣(λμ)a∣=∣λμ∣⋅∣a∣
-
分配律:
向量与数的乘积还满足以下分配律:-
标量对向量的分配律:
(𝜆+𝜇)𝑎=𝜆𝑎+𝜇𝑎(λ+μ)a=λa+μa -
向量对标量的分配律:
𝜆(𝑎+𝑏)=𝜆𝑎+𝜆𝑏λ(a+b)=λa+λb
-
这些规律可以通过向量与数乘积的定义加以证明。
应用举例
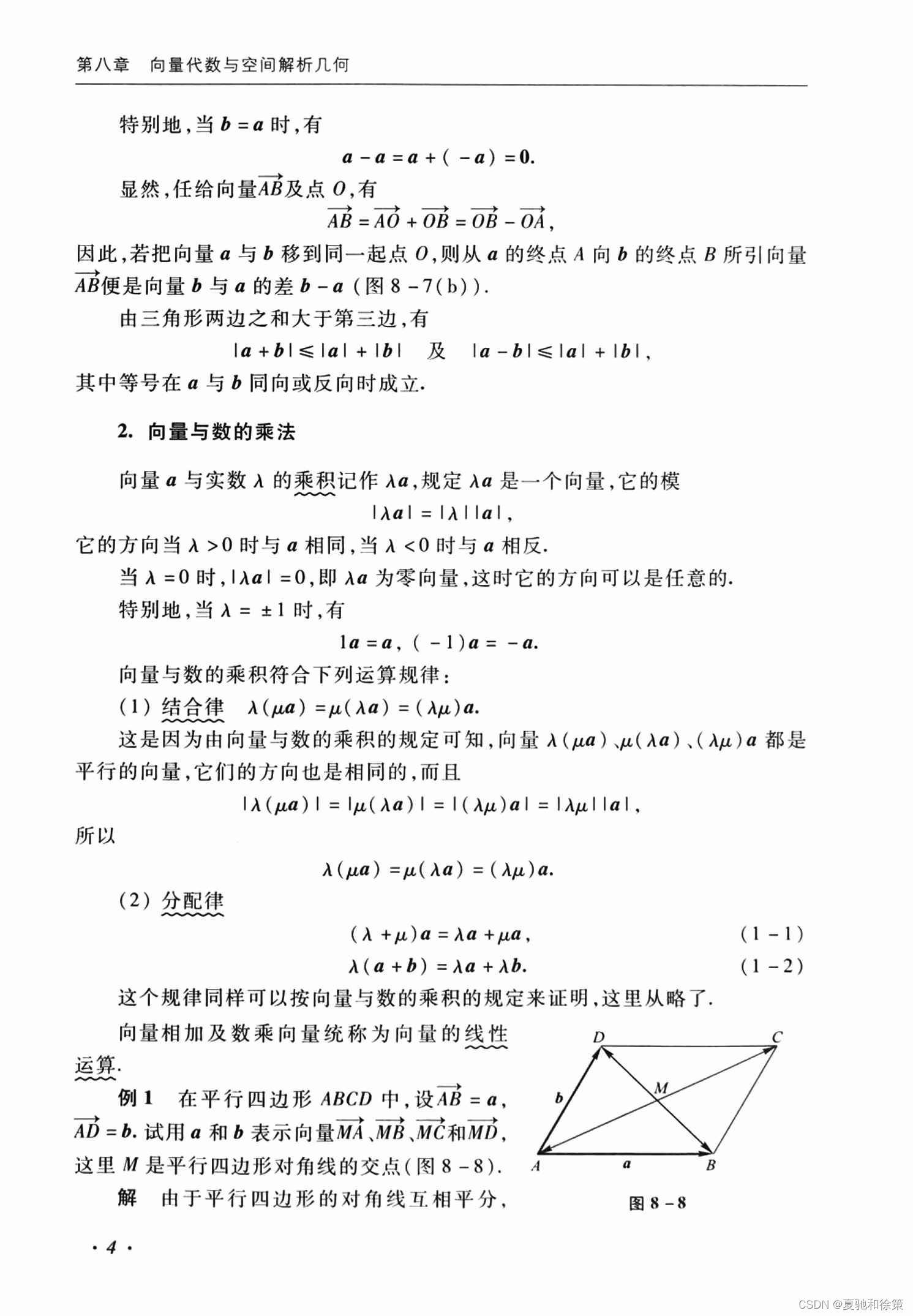
例 1: 在平行四边形 𝐴𝐵𝐶𝐷ABCD 中,设 𝐴𝐵=𝑎AB=a,𝐴𝐷=𝑏AD=b。用 𝑎a 和 𝑏b 表示向量 𝑀𝐴MA、𝑀𝐵MB、𝑁𝐶NC 和 𝑁𝐵NB,其中 𝑀M 是平行四边形对角线的交点(图 8-8)。
解: 平行四边形的对角线互相平分,因此有:
𝐴𝐶=𝑎+𝑏=2𝐴𝑀AC=a+b=2AM
𝐴𝑀=12(𝑎+𝑏)AM=21(a+b)
因此:
𝑀𝐴=−12(𝑎+𝑏)MA=−21(a+b)
同理,由于 𝑀𝐶=−𝐴𝑀MC=−AM:
𝑀𝐶=12(𝑎+𝑏)MC=21(a+b)
由于 −𝑎+𝑏=2𝑀𝐵−a+b=2MB:
𝑀𝐵=12(𝑏−𝑎)MB=21(b−a)
并且,因 𝑁𝐵=−𝑀𝐵NB=−MB:
𝑁𝐵=12(𝑎−𝑏)NB=21(a−b)
单位向量的概念
模等于1的向量称为单位向量。设单位向量 𝑒𝑎ea 与非零向量 𝑎a 同方向,根据向量与数乘积的定义,因 ∣𝑎∣>0∣a∣>0,所以:
∣𝑎∣𝑒𝑎∣a∣ea
与 𝑎a 方向相同,且模为:
∣𝑎∣⋅∣𝑒𝑎∣=∣𝑎∣⋅1=∣𝑎∣∣a∣⋅∣ea∣=∣a∣⋅1=∣a∣
因此:
𝑎=∣𝑎∣𝑒𝑎a=∣a∣ea
我们可以通过这种方式表示任意向量为单位向量与其模的乘积。当 𝜆≠0λ=0 时,有:
𝑎∣𝑎∣=𝑒𝑎∣a∣a=ea
这表示将非零向量除以它的模得到与原向量同方向的单位向量。
定理 1:向量平行性
设向量 𝑎≠0a=0,向量 𝑏b 平行于 𝑎a 的充分必要条件是:存在唯一的实数 𝜆λ 使得:
𝑏=𝜆𝑎b=λa
证明:
-
充分性:
这是显而易见的。 -
必要性:
设 𝑏∥𝑎b∥a,取 ∣𝜆∣=∣𝑏∣∣𝑎∣∣λ∣=∣a∣∣b∣。若 𝑏b 与 𝑎a 同向,则 𝜆λ 为正;若 𝑏b 与 𝑎a 反向,则 𝜆λ 为负。因此,𝑏=𝜆𝑎b=λa,因为此时 𝑏b 与 𝜆𝑎λa 同向,且:
∣𝜆𝑎∣=∣𝜆∣⋅∣𝑎∣=∣𝑏∣∣𝑎∣⋅∣𝑎∣=∣𝑏∣∣λa∣=∣λ∣⋅∣a∣=∣a∣∣b∣⋅∣a∣=∣b∣
-
唯一性:
设 𝑏=𝜆𝑎b=λa,又设 𝑏=𝜇𝑎b=μa,两式相减得:(𝜆−𝜇)𝑎=0(λ−μ)a=0
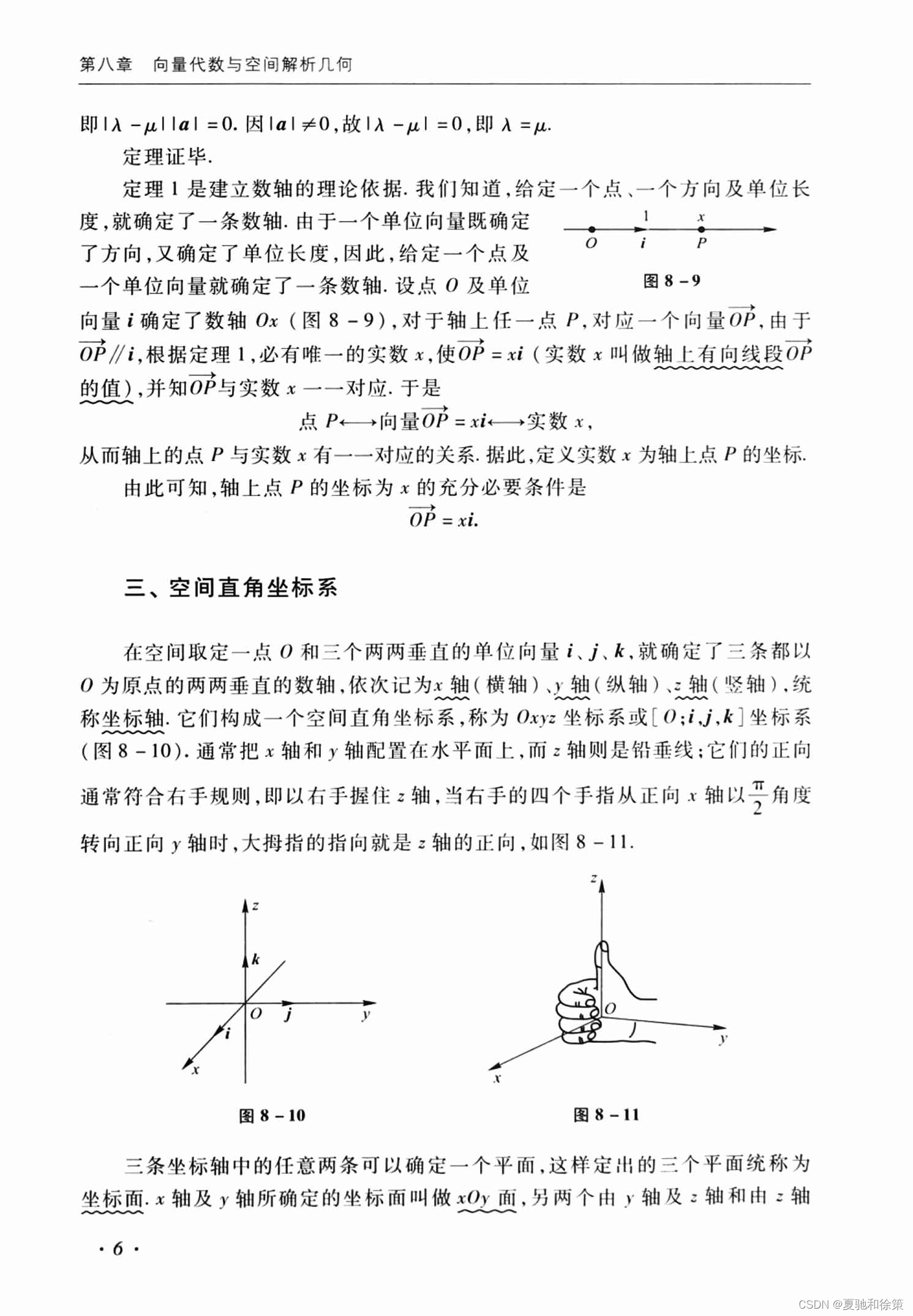
因为 ∣𝑎∣≠0∣a∣=0,所以 ∣𝜆−𝜇∣=0∣λ−μ∣=0,即:
𝜆=𝜇λ=μ
定理证明完毕。
定理的应用
定理 1 为建立数轴的理论提供了依据。给定一个方向和单位长度,数轴得以确定。一个单位向量不仅确定了方向,也确定了单位长度,因此给定一个点和单位向量可以确定一条数轴。
设点 𝑂O 和单位向量 𝑖i 确定了数轴 𝑂𝑥Ox(图 8-9)。对轴上的任意点 𝑃P,其对应的向量为 𝑂𝑃OP。由于 𝑂𝑃∥𝑖OP∥i,根据定理 1,存在唯一的实数 𝑥x,使得:
𝑂𝑃=𝑥𝑖OP=xi
实数 𝑥x 即为轴上有向线段 𝑂𝑃OP 的值,并与坐标轴上的点 𝑃P 存在一一对应关系。因此,轴上的点 𝑃P 的坐标为 𝑥x 的充分必要条件是:
𝑂𝑃=𝑥𝑖OP=xi
三、空间直角坐标系
在空间内选定一点 𝑂O(称为原点)以及三个两两垂直的单位向量 𝑖i、𝑗j 和 𝑘k,它们对应三条相互垂直、以 𝑂O 为原点的坐标轴。它们依次被称为 x 轴、y 轴 和 z 轴。这三个轴构成一个空间直角坐标系,称为 Oxyz 或 [𝑂;𝑖,𝑗,𝑘][O;i,j,k] 坐标系(见图 8-10)。
通常,x 轴和 y 轴位于水平面内,而 z 轴为铅垂线,并且坐标轴的方向通常遵循右手定则:用右手握住 z 轴,当右手的四个手指沿 x 轴正方向向 y 轴正方向转动时,拇指指向的方向就是 z 轴的正向(见图 8-11)。
坐标面和象限
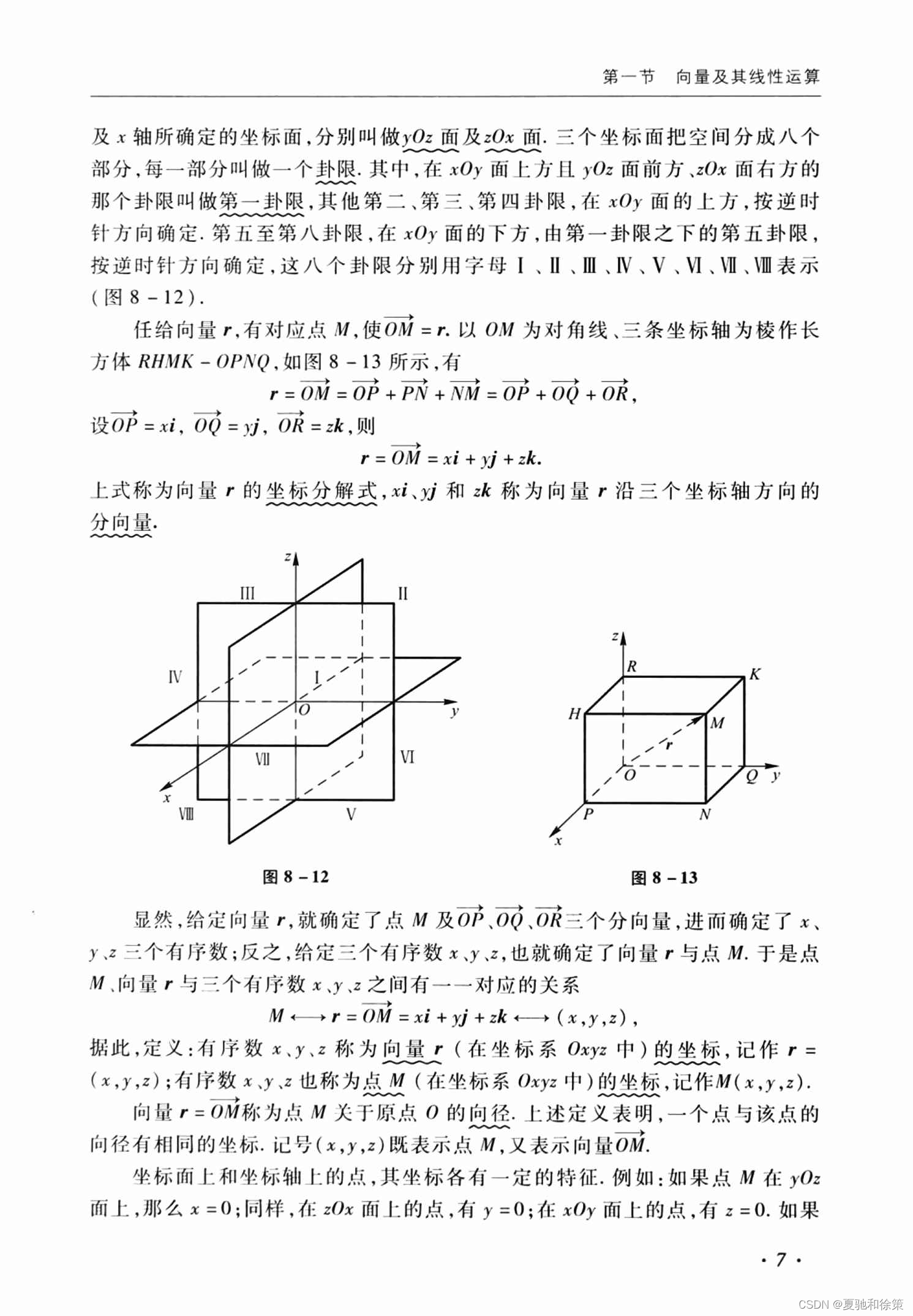
三条坐标轴的任意两条可以确定一个平面,这样定出的三个平面统称为 坐标面。
- xOy 平面: 由 x 轴和 y 轴确定
- yOz 平面: 由 y 轴和 z 轴确定
- zOx 平面: 由 z 轴和 x 轴确定
这三个平面将空间分为八个部分,称为 象限。在 xOy 平面上方、yOz 平面前方、zOx 平面右方的象限被称为第一象限。其余象限编号依次为:第二、第三、第四象限,按逆时针方向排列(位于 xOy 平面上方)。第五到第八象限位于 xOy 平面下方,也按逆时针方向排列。它们分别用罗马数字 I、II、III、IV、V、VI、VII 和 VIII 表示(见图 8-12)。
向量的坐标分解
设 𝑟r 为一个向量,对应空间中某一点 𝑀M,使得 𝑂𝑀=𝑟OM=r。以 𝑂𝑀OM 为对角线,三条坐标轴为棱作出长方体 𝑅𝐻𝑀𝐾RHMK-𝑂𝑃𝑁𝑄OPNQ,如图 8-13 所示。有:
𝑟=𝑂𝑀=𝑂𝑃+𝑃𝑁+𝑁𝑅=𝑂𝑃+𝑂𝑄+𝑂𝑅r=OM=OP+PN+NR=OP+OQ+OR
设 𝑂𝑃=𝑥𝑖OP=xi、𝑂𝑄=𝑦𝑗OQ=yj、𝑂𝑅=𝑧𝑘OR=zk,则:
𝑟=𝑂𝑀=𝑥𝑖+𝑦𝑗+𝑧𝑘r=OM=xi+yj+zk
上式称为向量 𝑟r 的 坐标分解式,其中 𝑥𝑖xi、𝑦𝑗yj 和 𝑧𝑘zk 称为向量 𝑟r 沿三个坐标轴方向的分向量。
坐标关系
显然,给定向量 𝑟r,可以确定点 𝑀M、向径 𝑂𝑀OM、以及 𝑥x、𝑦y 和 𝑧z 三个有序数。反之,给定这三个有序数也可以确定向量 𝑟r 和点 𝑀M。因此,点 𝑀M、向量 𝑟r 与三个有序数 𝑥x、𝑦y、𝑧z 之间存在一一对应关系:
𝑀→𝑟=𝑂𝑀=𝑥𝑖+𝑦𝑗+𝑧𝑘→(𝑥,𝑦,𝑧)M→r=OM=xi+yj+zk→(x,y,z)
根据这个关系,我们可以定义:三个有序数 𝑥x、𝑦y、𝑧z 分别称为 向量 𝑟r(在 Oxyz 坐标系中) 的坐标,记作 𝑟=(𝑥,𝑦,𝑧)r=(x,y,z)。同时,这三个有序数也被称为 点 𝑀M(在 Oxyz 坐标系中) 的坐标,记作 𝑀=(𝑥,𝑦,𝑧)M=(x,y,z)。
向量 𝑟=𝑂𝑀r=OM 称为 点 𝑀M 关于原点 𝑂O 的向径。上述定义表明,一个点与该点的向径具有相同的坐标。表示形式 (𝑥,𝑦,𝑧)(x,y,z) 可以同时表示点 𝑀M 和向径 𝑂𝑀OM。
坐标面的特征
坐标面和坐标轴上的点具有以下特征:
-
在 yOz 平面 上的点:
𝑥=0x=0 -
在 zOx 平面 上的点:
𝑦=0y=0 -
在 xOy 平面 上的点:
𝑧=0z=0 -
在 x 轴 上的点:
𝑦=𝑧=0y=z=0 -
在 y 轴 上的点:
𝑥=𝑧=0x=z=0 -
在 z 轴 上的点:
𝑥=𝑦=0x=y=0 -
如果点 𝑀M 是 原点:
𝑥=𝑦=𝑧=0x=y=z=0
四、利用坐标作向量的线性运算
通过向量的坐标表示,可以方便地进行向量的加法、减法和数乘等线性运算。设 𝑎=(𝑎1,𝑎2,𝑎3)a=(a1,a2,a3) 和 𝑏=(𝑏1,𝑏2,𝑏3)b=(b1,b2,b3),即:
𝑎=𝑎1𝑖+𝑎2𝑗+𝑎3𝑘a=a1i+a2j+a3k
𝑏=𝑏1𝑖+𝑏2𝑗+𝑏3𝑘b=b1i+b2j+b3k
根据向量加法的交换律、结合律以及向量与数的乘法的结合律和分配律,有:
-
向量加法:
𝑎+𝑏=(𝑎1+𝑏1)𝑖+(𝑎2+𝑏2)𝑗+(𝑎3+𝑏3)𝑘a+b=(a1+b1)i+(a2+b2)j+(a3+b3)k
对应坐标表示为:
𝑎+𝑏=(𝑎1+𝑏1,𝑎2+𝑏2,𝑎3+𝑏3)a+b=(a1+b1,a2+b2,a3+b3) -
向量减法:
𝑎−𝑏=(𝑎1−𝑏1)𝑖+(𝑎2−𝑏2)𝑗+(𝑎3−𝑏3)𝑘a−b=(a1−b1)i+(a2−b2)j+(a3−b3)k
对应坐标表示为:
𝑎−𝑏=(𝑎1−𝑏1,𝑎2−𝑏2,𝑎3−𝑏3)a−b=(a1−b1,a2−b2,a3−b3) -
数乘向量:
对于任意实数 𝐴A:
𝐴𝑎=(𝐴𝑎1)𝑖+(𝐴𝑎2)𝑗+(𝐴𝑎3)𝑘Aa=(Aa1)i+(Aa2)j+(Aa3)k
对应坐标表示为:
𝐴𝑎=(𝐴𝑎1,𝐴𝑎2,𝐴𝑎3)Aa=(Aa1,Aa2,Aa3)
这些运算表明,对向量进行加减法或数乘操作,只需分别对各个坐标进行相应的运算即可。
向量的平行关系
根据定理1,当向量 𝑎≠0a=0 时,向量 𝑏b 平行于 𝑎a 的充要条件是存在唯一的实数 𝐴A,使得:
𝑏=𝐴𝑎b=Aa
对应的坐标表示为:
(𝑏1,𝑏2,𝑏3)=𝐴(𝑎1,𝑎2,𝑎3)(b1,b2,b3)=A(a1,a2,a3)
这意味着,向量 𝑏b 和 𝑎a 对应的坐标成比例。
例题 1:解以向量为元的线性方程组
给定线性方程组:
{3𝑥−2𝑦=6}{3x−2y=6}
其中 𝑎=(2,1,2)a=(2,1,2) 和 𝑏=(−1,1,−2)b=(−1,1,−2)。
解: 如同解以实数为元的线性方程组一样,求解得:
𝑥=2𝑎−3𝑏x=2a−3b
𝑦=3𝑎−5𝑏y=3a−5b
将 𝑎a 和 𝑏b 的坐标表示代入,得到:
𝑥=2(2,1,2)−3(−1,1,−2)=(7,−1,10)x=2(2,1,2)−3(−1,1,−2)=(7,−1,10)
𝑦=3(2,1,2)−5(−1,1,−2)=(11,−2,16)y=3(2,1,2)−5(−1,1,−2)=(11,−2,16)
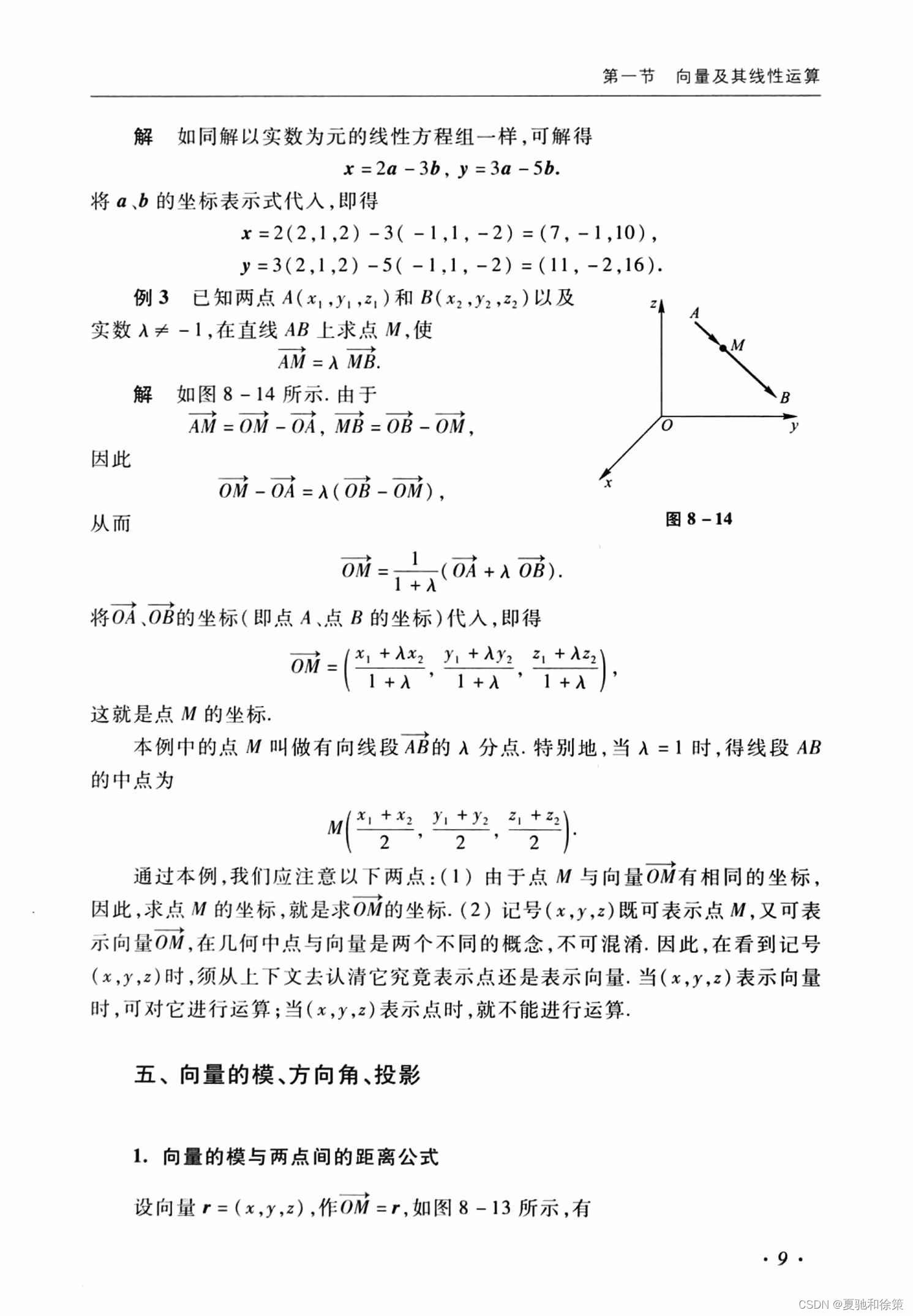
例题 2:在直线 AB 上求点 M
已知两点 𝐴(𝑥1,𝑦1,𝑧1)A(x1,y1,z1) 和 𝐵(𝑥2,𝑦2,𝑧2)B(x2,y2,z2),以及实数 𝜆≠−1λ=−1。在直线 AB 上求点 𝑀M,使得:
𝐴𝑁=𝜆⋅𝑀𝐵AN=λ⋅MB
解: 如图 8-14 所示。由于:
𝐴𝑁=𝑂𝑀−𝑂𝐴AN=OM−OA
𝑀𝐵=𝑂𝐵−𝑂𝑀MB=OB−OM
因此:
𝑂𝑀−𝑂𝐴=𝜆(𝑂𝐵−𝑂𝑀)OM−OA=λ(OB−OM)
从而:
𝑂𝑀=11+𝜆(𝑂𝐴+𝜆𝑂𝐵)OM=1+λ1(OA+λOB)
将点 𝐴A 和点 𝐵B 的坐标代入,得到:
𝑂𝑀=11+𝜆(𝑥1+𝜆𝑥2,𝑦1+𝜆𝑦2,𝑧1+𝜆𝑧2)OM=1+λ1(x1+λx2,y1+λy2,z1+λz2)
这就是点 𝑀M 的坐标。
注: 在此例中,点 𝑀M 被称为向量 AB 的 𝜆λ 分点。当 𝜆=1λ=1 时,得到线段 AB 的中点:
𝑀=(𝑥1+𝑥22,𝑦1+𝑦22,𝑧1+𝑧22)M=(2x1+x2,2y1+y2,2z1+z2)
总结:
-
由于点 𝑀M 和向径 𝑂𝑀OM 具有相同的坐标,求点 𝑀M 的坐标即为求 𝑂𝑀OM 的坐标。
-
记号 (𝑥,𝑦,𝑧)(x,y,z) 既可以表示点 𝑀M,也可以表示向径 𝑂𝑀OM。在几何学中,点和向量是两个不同的概念,不可混淆。当 (𝑥,𝑦,𝑧)(x,y,z) 表示向量时,可以对其进行运算;而当 (𝑥,𝑦,𝑧)(x,y,z) 表示点时,不能直接对其进行运算。需要根据上下文明确它的含义。
五、向量的模、方向角、投影
1. 向量的模与两点间的距离公式
设向量 𝑟=(𝑥,𝑦,𝑧)r=(x,y,z),作 𝑂𝑀=𝑟OM=r,如图 8-13 所示:
𝑟=𝑂𝑀=𝑂𝑃+𝑂𝑄+𝑂𝑅r=OM=OP+OQ+OR
根据勾股定理可得:
∣𝑟∣=∣𝑂𝑀∣=∣𝑂𝑃∣2+∣𝑂𝑄∣2+∣𝑂𝑅∣2∣r∣=∣OM∣=∣OP∣2+∣OQ∣2+∣OR∣2
其中,利用 𝑂𝑃=𝑥𝑖OP=xi、𝑂𝑄=𝑦𝑗OQ=yj、𝑂𝑅=𝑧𝑘OR=zk,得:
∣𝑂𝑃∣=∣𝑥∣,∣𝑂𝑄∣=∣𝑦∣,∣𝑂𝑅∣=∣𝑧∣∣OP∣=∣x∣,∣OQ∣=∣y∣,∣OR∣=∣z∣
于是,向量模的坐标表示为:
∣𝑟∣=𝑥2+𝑦2+𝑧2∣r∣=x2+y2+z2
设有两点 𝐴(𝑥1,𝑦1,𝑧1)A(x1,y1,z1) 和 𝐵(𝑥2,𝑦2,𝑧2)B(x2,y2,z2),两点间的距离 ∣𝐴𝐵∣∣AB∣ 就是向量 𝐴𝐵AB 的模。根据:
𝐴𝐵=𝑂𝐵−𝑂𝐴=(𝑥2,𝑦2,𝑧2)−(𝑥1,𝑦1,𝑧1)=(𝑥2−𝑥1,𝑦2−𝑦1,𝑧2−𝑧1)AB=OB−OA=(x2,y2,z2)−(x1,y1,z1)=(x2−x1,y2−y1,z2−z1)
得两点间的距离公式:
∣𝐴𝐵∣=(𝑥2−𝑥1)2+(𝑦2−𝑦1)2+(𝑧2−𝑧1)2∣AB∣=(x2−x1)2+(y2−y1)2+(z2−z1)2
例题 4:
题目: 求证以 𝑀1(4,3,1)M1(4,3,1)、𝑀2(7,1,2)M2(7,1,2) 和 𝑀3(5,2,3)M3(5,2,3) 三点为顶点的三角形是一个等腰三角形。
解答:
计算三条边的平方:
∣𝑀1𝑀2∣2=(7−4)2+(1−3)2+(2−1)2=14∣M1M2∣2=(7−4)2+(1−3)2+(2−1)2=14
∣𝑀2𝑀3∣2=(5−7)2+(2−1)2+(3−2)2=6∣M2M3∣2=(5−7)2+(2−1)2+(3−2)2=6
∣𝑀3𝑀1∣2=(4−5)2+(3−2)2+(1−3)2=6∣M3M1∣2=(4−5)2+(3−2)2+(1−3)2=6
因为 ∣𝑀2𝑀3∣=∣𝑀3𝑀1∣∣M2M3∣=∣M3M1∣,所以三角形 𝑀1𝑀2𝑀3M1M2M3 是等腰三角形。
例题 5:
题目: 在 z 轴上求与两点 𝐴(−4,1,7)A(−4,1,7) 和 𝐵(3,5,−2)B(3,5,−2) 等距离的点。
解答: 因为所求的点在 z 轴上,所以设该点为 𝑀(0,0,𝑧)M(0,0,z)。依题意有:
∣𝐴𝑀∣=∣𝐵𝑀∣∣AM∣=∣BM∣
即:
(0+4)2+(0−1)2+(𝑧−7)2=(3−0)2+(5−0)2+(−2−𝑧)2(0+4)2+(0−1)2+(z−7)2=(3−0)2+(5−0)2+(−2−z)2
两边平方后,解得:
𝑧=9z=9
因此,所求的点为 𝑀(0,0,9)M(0,0,9)。
例题 6:
题目: 已知两点 𝐴(4,0,5)A(4,0,5) 和 𝐵(7,1,3)B(7,1,3),求与 AB 方向相同的单位向量 𝑡t。
解答:
𝐴𝐵=𝑂𝐵−𝑂𝐴=(7,1,3)−(4,0,5)=(3,1,−2)AB=OB−OA=(7,1,3)−(4,0,5)=(3,1,−2)
于是:
∣𝐴𝐵∣=32+12+(−2)2=14∣AB∣=32+12+(−2)2=14
单位向量:
𝑡=𝐴𝐵∣𝐴𝐵∣=(3,1,−2)14t=∣AB∣AB=14(3,1,−2)
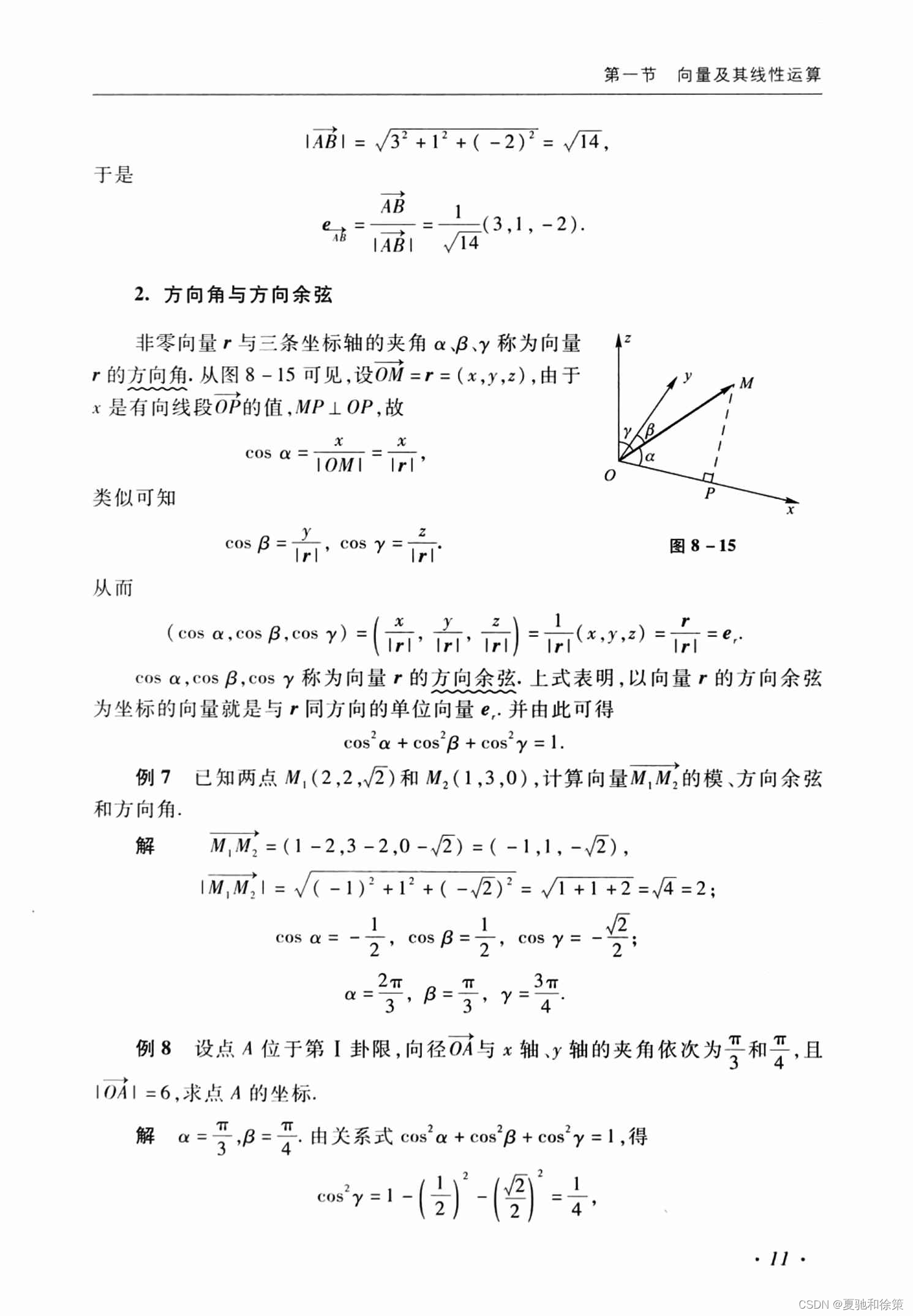
2. 方向角与方向余弦
非零向量 𝑟r 与三条坐标轴的夹角 𝛼α、𝛽β 和 𝛾γ 称为向量 𝑟r 的方向角,如图 8-15 所示。设 𝑂𝑀=𝑟=(𝑥,𝑦,𝑧)OM=r=(x,y,z),根据三角关系有:
cos𝛼=𝑥∣𝑟∣cosα=∣r∣x
cos𝛽=𝑦∣𝑟∣cosβ=∣r∣y
cos𝛾=𝑧∣𝑟∣cosγ=∣r∣z
因此:
(cos𝛼,cos𝛽,cos𝛾)=(𝑥,𝑦,𝑧)∣𝑟∣(cosα,cosβ,cosγ)=∣r∣(x,y,z)
称为向量 𝑟r 的方向余弦。可以看出,方向余弦组成的向量就是与 𝑟r 同方向的单位向量。并且满足:
cos2𝛼+cos2𝛽+cos2𝛾=1cos2α+cos2β+cos2γ=1
例题 7:
题目: 已知两点 𝑀1(2,2,2)M1(2,2,2) 和 𝑀2(1,3,0)M2(1,3,0),计算向量 𝑀1𝑀2M1M2 的模、方向余弦和方向角。
解答:
𝑀1𝑀2=(1−2,3−2,0−2)=(−1,1,−2)M1M2=(1−2,3−2,0−2)=(−1,1,−2)
模:
∣𝑀1𝑀2∣=(−1)2+12+(−2)2=1+1+2=4=2∣M1M2∣=(−1)2+12+(−2)2=1+1+2=4=2
方向余弦:
cos𝛼=−12,cos𝛽=12,cos𝛾=−22cosα=−21,cosβ=21,cosγ=−22
方向角:
𝛼=arccos(−12),𝛽=arccos(12),𝛾=arccos(−22)α=arccos(−21),β=arccos(21),γ=arccos(−22)
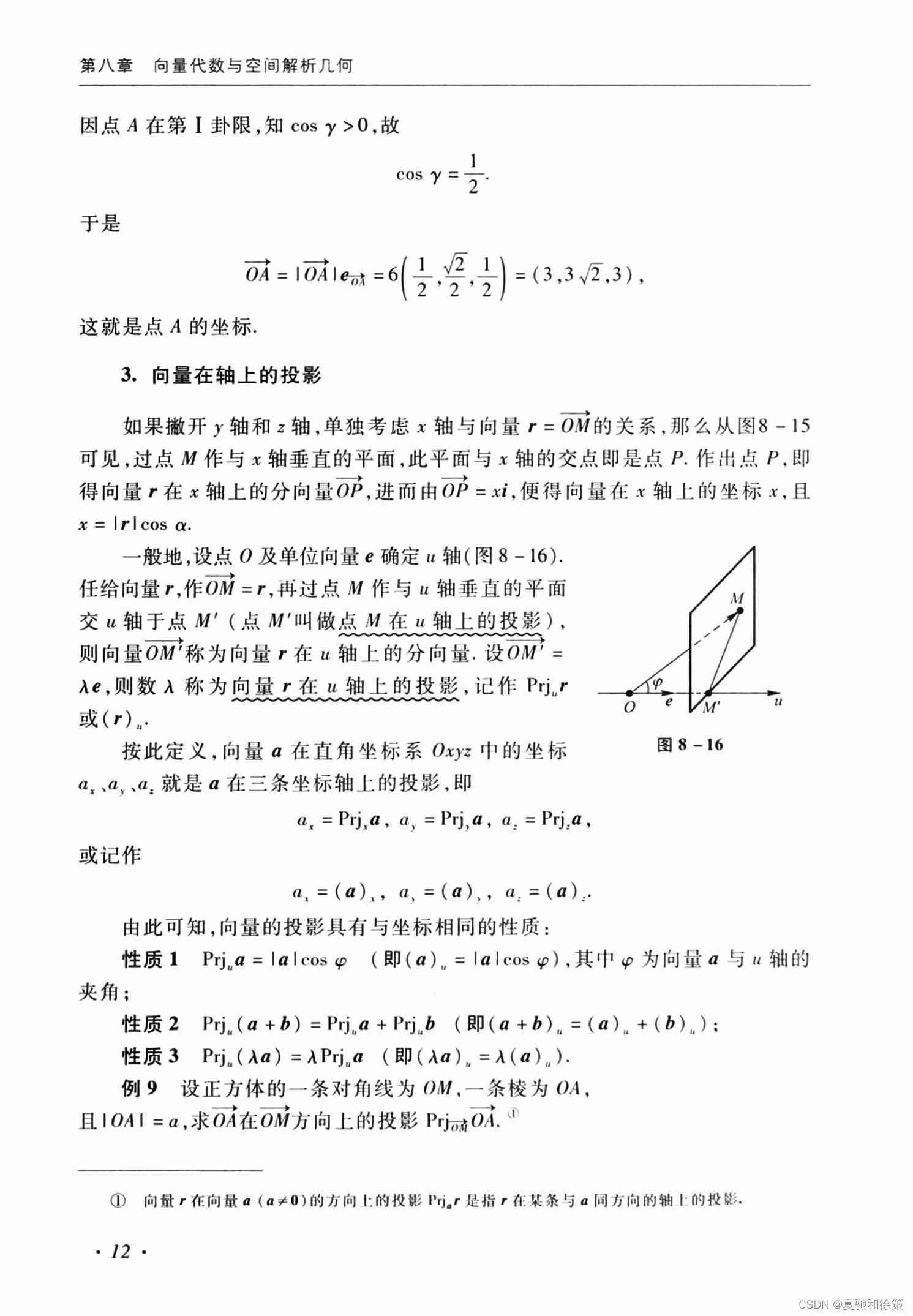
3. 向量在轴上的投影
如果我们只考虑向量 𝑟=𝑂𝑀r=OM 与 x 轴的关系,如图 8-15 所示,过点 𝑀M 作与 x 轴垂直的平面,平面与 x 轴的交点即为点 𝑃P。此时,点 𝑃P 即为向量 𝑟r 在 x 轴上的投影。
一般地,设单位向量 𝑒e 与点 𝑂O 确定了 𝑢u 轴,如图 8-16 所示。对于任意向量 𝑟r,过点 𝑀M 作与 𝑢u 轴垂直的平面,平面与 𝑢u 轴的交点为点 𝑀′M′,此时点 𝑀′M′ 即为点 𝑀M 在 𝑢u 轴上的投影,向量 𝑂𝑀′OM′ 则是向量 𝑟r 在 𝑢u 轴上的分向量。设:
𝑂𝑀′=𝐴𝑒OM′=Ae
则数 𝐴A 为向量 𝑟r 在 𝑢u 轴上的投影,记作 Proj𝑢𝑟Projur 或 (𝑟)𝑢(r)u。
性质:
-
投影的计算:
Proj𝑢𝑟=∣𝑟∣cos𝜙Projur=∣r∣cosϕ
其中 𝜙ϕ 为向量 𝑟r 与 𝑢u 轴的夹角。 -
加法:
Proj𝑢(𝑎+𝑏)=Proj𝑢𝑎+Proj𝑢𝑏Proju(a+b)=Projua+Projub -
数乘:
Proj𝑢(𝜆𝑎)=𝜆Proj𝑢𝑎Proju(λa)=λProjua
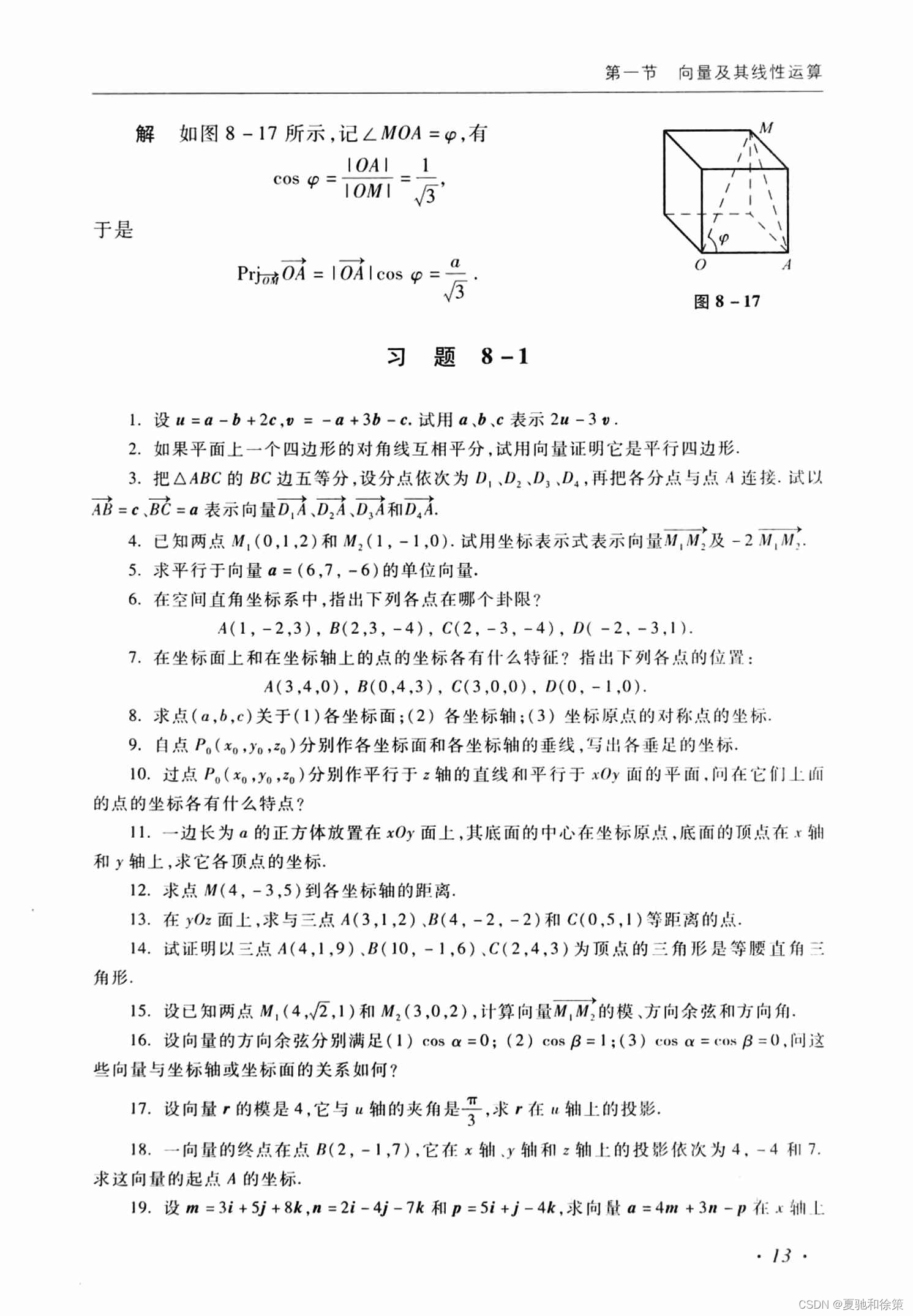
例题 9:
题目: 设正方体的一条对角线为 𝑂𝑀OM,一条棱为 𝑂𝐴OA,且 ∣𝑂𝐴∣=𝑎∣OA∣=a。求 𝑂𝐴OA 在 𝑂𝑀OM 方向上的投影 Proj𝑂𝑀𝑂𝐴ProjOMOA。
解答:
如图 8-17 所示,记 ∠𝑀𝑂𝐴=𝜙∠MOA=ϕ,有:
cos𝜙=∣𝑂𝐴∣∣𝑂𝑀∣=𝑎3𝑎=13cosϕ=∣OM∣∣OA∣=3aa=31
于是:
Proj𝑂𝑀𝑂𝐴=∣𝑂𝐴∣cos𝜙=𝑎⋅13=𝑎3ProjOMOA=∣OA∣cosϕ=a⋅31=3a



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











