






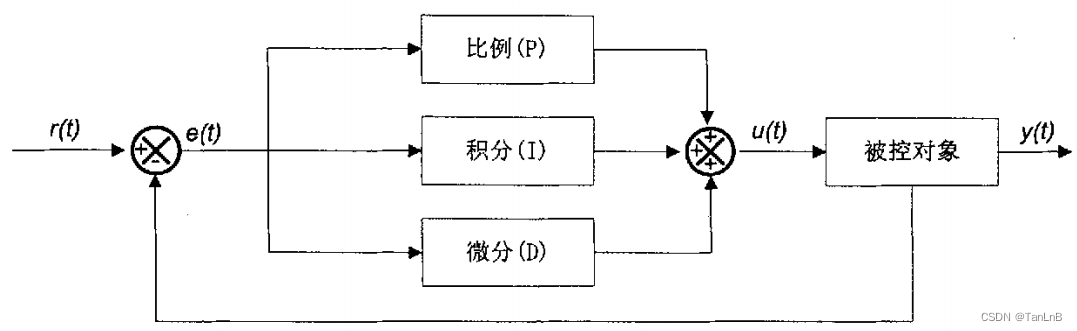
图中r(t)是给定值,v(t)是系统的实际输出值,e (t)是给定值与实际值的偏差
可得
e(t)=r(t)-y(t)
所以模拟PID控制器的控制规律为

式中 Kp——比例系数;
Tl——积分常数:
TD——微分常数;
u0——控制常数。
在比例PID控制器中,比例环节的作用是对偏差瞬间作出快速反应。偏差一旦产生,控制器立即产生控制作用,使控制量向减少偏差的方向变化。控制作用的强弱取决于比例系数Kp, Kp越大,控制越强,但过大的Kp会导致系统振荡,破坏系统的稳定性。
积分环节的作用是把偏差的积累作为输出。在控制过程中,只要有偏差存在,积分环节的输出就会不断增大,直到偏差e(t)=0,输出的u(t)才可能维持在某一常量,使系统在给定值r(t)不变的条件下趋于稳态,因此积分环节能消除系统输出的静态误差。但积分环节也会降低系统的响应速度,增加系统的超调量。
微分环节的作用是阻止偏差的变化。它是根据偏差的变化趋势 (变化速度)进行控制。偏差变化得越快,微分控制器的输出就越大,并能在偏差值变大之前进行修正。微分作用的引入,将有助于减小超调量,克服振荡,使系统趋于稳定,特别对高阶系统非常有利,它加快了系统的跟踪速度。但微分的作用对输入信号的噪声很敏感,对那些噪声较大的系统一般不用微分,或在微分作用之前先对输入信号进行滤波。














11-24
 3884
3884
3884
04-23
2万+
2万+
05-27
4万+
4万+
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









