




 本文介绍了一种基于OpenCV的形状匹配方法,该方法通过轮廓检测实现模板匹配,并详细解释了matchShapes函数的工作原理及其应用实例。
本文介绍了一种基于OpenCV的形状匹配方法,该方法通过轮廓检测实现模板匹配,并详细解释了matchShapes函数的工作原理及其应用实例。
算子:
matchShapes( InputArray contour1, InputArray contour2, int method, double parameter )
(1)参数1是待匹配轮廓或者灰度图像
(2)参数2同参数1
(3)比较参数1和2相似度的方法,opencv提供了三种如下:
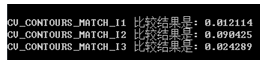
CV_CONTOURS_MATCH_I1
CV_CONTOURS_MATCH_I2
CV_CONTOURS_MATCH_I3
(4)参数4为目前还不支持,使用时赋个0就ok。
针对三种匹配方法进行比较,结果如下:
形状匹配过程:
-
将待识别图像 -> 灰度处理 -> 自动阈值分割
-
通过轮廓检索函数 cv.findContours 找到待识别图像所有轮廓
-
模板图像 -> 灰度图像 -> 自动阈值分割
-
通过轮廓检索函数 cv.findContours 找到模板图像中目标的外轮廓
-
将第2步得到的轮廓逐一和第4步得到的轮廓 通过 cv.matchShapes 函数进行形状匹配。找到其中最小值,最小值对应的待识别图像中的轮廓即为匹配到的模板图像
-
标出在待识别图像中找到的模板图像
注意:利用mathshape得到的匹配分值越小,则两个轮廓越相似,越大则越不相似。在匹配过程中会通过匹配分值与设定的分值进行比较,在保证匹配效果完美的情况下,设定的分值越低越好,如果设定的匹配分值略高,可能会导致两个完全不相似的形状匹配成功(亲身实验,分值设高,利用三角形会匹配到圆形)。
另外,matchShapes函数其实比较的是两个轮廓的Hu不变矩。Hu矩特性:具有旋转,缩放和平移不变性。由Hu矩组成的特征量对图片进行识别,优点就是速度很快,缺点是识别率比较低。 因此Hu不变矩一般用来识别图像中大的物体,对于物体的形状描述得比较好,图像的纹理特征不能太复杂。
代码:
(1)创建形状轮廓模板
vector<Point> ImageTemplateContours(Mat img_template)
{
//灰度化
Mat gray_img_template;
cvtColor(img_template, gray_img_template, COLOR_BGR2GRAY);
//阈值分割
Mat thresh_img_template;
threshold(gray_img_template, thresh_img_template, 0, 255, THRESH_OTSU);
//膨胀处理
Mat ellipse = getStructuringElement(MORPH_ELLIPSE 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3573
3573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









