







loss_layer:
AccuracyLayer类;
LossLayer类;
ContrastiveLossLayer类;
EuclideanLossLayer类;
HingeLossLayer类;
InfogainLossLayer类;
MultinomialLogisticLossLayer类;
SigmoidCrossEntropyLossLayer类;
SoftmaxWithLossLayer类;
终于看到最后一层了。
首先定义了一个常数:
const float kLOG_THRESHOLD = 1e-20;
1 AccuracyLayer:
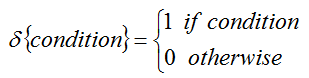
Computes the classification accuracy for a one-of-many classification task.
1.1 原理介绍:
首先需要弄清楚,这个层是什么作用,上面的粉红色字体告诉我们,该层是计算分类精度的。所以我们常常在论文中会看到top-1, top5就是这里计算出来的。
假设批量训练的时候,一个批量的大小是N,那么对该批量的训练精度可以表示为:
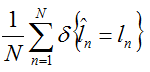
其中:
分类标签的预测值为:

分类标签的实际值为:

那么top-1也就是将评分最高的那个预测分类标签与实际标签做比较,而top-5是将评分最高的前5个预测分类标签与实际标签做比较(只要有一个比较成功就算是成功)。
由于只是计算精度,所以没有反馈。
另外还可以推出,这个层通常处于最末端。
1.2 属性变量:
int top_k_;这个变量在前面已经介绍过了。
1.3 构造函数:
template <typename Dtype>
void AccuracyLayer<Dtype>::LayerSetUp(
const vector<Blob<Dtype>*>& bottom, vector<Blob<Dtype>*>* top) {
top_k_ = this->layer_param_.accuracy_param().top_k();
}
template <typename Dtype>
void AccuracyLayer<Dtype>::Reshape(
const vector<Blob<Dtype>*>& bottom, vector<Blob<Dtype>*>* top) {
CHECK_EQ(bottom[0]->num(), bottom[1]->num())
<< "The data and label should have the same number.";
CHECK_LE(top_k_, bottom[0]->count() / bottom[0]->num())
<< "top_k must be less than or equal to the number of classes.";
CHECK_EQ(bottom[1]->channels(), 1);
CHECK_EQ(bottom[1]->height(), 1);
CHECK_EQ(bottom[1]->width(), 1);
(*top)[0]->Reshape(1, 1, 1, 1);
}从 LayerSetUp()中可以看到,top_k是可以在网络配置文件中设置的。
另外,因为该层的目的只是计算精度,所以top层只有1个元素。
1.4 前馈函数:
template <typename Dtype>
void AccuracyLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
vector<Blob<Dtype>*>* top) {
Dtype accuracy = 0;
const Dtype* bottom_data = bottom[0]->cpu_data();
const Dtype* bottom_label = bottom[1]->cpu_data();
int num = bottom[0]->num();
int dim = bottom[0]->count() / bottom[0]->num();
vector<Dtype> maxval(top_k_+1);
vector<int> max_id(top_k_+1);
for (int i = 0; i < num; ++i) {
// Top-k accuracy
std::vector<std::pair<Dtype, int> > bottom_data_vector;
for (int j = 0; j < dim; ++j) {
bottom_data_vector.push_back(
std::make_pair(bottom_data[i * dim + j], j));
}
std::partial_sort(
bottom_data_vector.begin(), bottom_data_vector.begin() + top_k_,
bottom_data_vector.end(), std::greater<std::pair<Dtype, int> >());
// check if true label is in top k predictions
for (int k = 0; k < top_k_; k++) {
if (bottom_data_vector[k].second == static_cast<int>(bottom_label[i])) {
++accuracy;
break;
}
}
}
// LOG(INFO) << "Accuracy: " << accuracy;
(*top)[0]->mutable_cpu_data()[0] = accuracy / num;
// Accuracy layer should not be used as a loss function.
}整个过程不难理解,其中用到了比较有意思的 部分排序——partial_sort,然后其中定义的max_id似乎没有用的样子欸。
2 LossLayer:
An interface for Layer%s that take two Blob%s as input -- usually (1) predictions and (2) ground-truth labels -- and output a singleton Blob representing the loss.
LossLayers are typically only capable of backpropagating to their first input -- the predictions.
这里就先不介绍了,因为从类中可以看到,这还只是一个抽象类,说明在caffe中实现了各种损失层,都继承了这个抽象类:
template <typename Dtype>
class LossLayer : public Layer<Dtype> {
public:
explicit LossLayer(const LayerParameter& param)
: Layer<Dtype>(param) {}
virtual void LayerSetUp(
const vector<Blob<Dtype>*>& bottom, vector<Blob<Dtype>*>* top);
virtual void Reshape(
const vector<Blob<Dtype>*>& bottom, vector<Blob<Dtype>*>* top);
virtual inline int ExactNumBottomBlobs() const { return 2; }
/**
* @brief For convenience and backwards compatibility, instruct the Net to
* automatically allocate a single top Blob for LossLayers, into which
* they output their singleton loss, (even if the user didn't specify
* one in the prototxt, etc.).
*/
virtual inline bool AutoTopBlobs() const { return true; }
virtual inline int ExactNumTopBlobs() const { return 1; }
/**
* We usually cannot backpropagate to the labels; ignore force_backward for
* these inputs.
*/
virtual inline bool AllowForceBackward(const int bottom_index) const {
return bottom_index != 1;
}
};3 ContrastiveLossLayer:
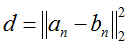
Computes the contrastive loss
where
This can be used to train siamese networks.
@param bottom input Blob vector (length 3)
-# @f$ (N \times C \times 1 \times 1) @f$
the features:

-# @f$ (N \times C \times 1 \times 1) @f$
the features:
-# @f$ (N \times 1 \times 1 \times 1) @f$
the binary similarity:

3.1 原理介绍:
这是一种损失值计算方式,上面也提到了,这种损失值对于siamese network很有用,这种网络是05年Yann Lecun提出来的,它的特点是它接收两个图片作为输入,而不是一张图片作为输入。
摘抄自caffe github的issue697
Siamese nets are supervised models for metric learning [1].
[1] S. Chopra, R. Hadsell, and Y. LeCun. Learning a similarity metric discriminatively, with application to face verification. In Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE Computer Society Conference on, volume 1, pages 539–546. IEEE, 2005. http://yann.lecun.com/exdb/publis/pdf/chopra-05.pdf
Speaking of metric learning, I remember that @norouzi had proposed and open sourced a method that learned a Hamming distance metric to distinguish similar and dissimilar images [2].
[2] Mohammad Norouzi, David J. Fleet, Ruslan Salakhutdinov, Hamming Distance Metric Learning, Neural Information Processing Systems (NIPS), 2012.
根据前面的介绍,其实该层的前馈计算过程已经算是描述清楚了,那么反馈过程是怎样的呢?
根据链式法则有:
当两图相似的时候(也就是y=1):
对b的求导也就是多了一个负号而已。
当两图不相似时(也就是y=0):
因为margin是常量,所以求导过程与上面类似,只是还要再多一个负号。当然这里面还要分margin-d是否大于0,如果小于0,导数还是0。
3.2 属性变量:
Blob<Dtype> diff_; // cached for backward pass
Blob<Dtype> dist_sq_; // cached for backward pass
Blob<Dtype> diff_sq_; // tmp storage for gpu forward pass
Blob<Dtype> summer_vec_; // tmp storage for gpu forward pass3.3 构造函数:
template <typename Dtype>
void ContrastiveLossLayer<Dtype>::LayerSetUp(
const vector<Blob<Dtype>*>& bottom, vector<Blob<Dtype>*>* top) {
LossLayer<Dtype>::LayerSetUp(bottom, top);
CHECK_EQ(bottom[0]->channels(), bottom[1]->channels());
CHECK_EQ(bottom[0]->height(), 1);
CHECK_EQ(bottom[0]->width(), 1);
CHECK_EQ(bottom[1]->height(), 1);
CHECK_EQ(bottom[1]->width(), 1);
CHECK_EQ(bottom[2]->channels(), 1);
CHECK_EQ(bottom[2]->height(), 1);
CHECK_EQ(bottom[2]->width(), 1);
diff_.Reshape(bottom[0]->num(), bottom[0]->channels(), 1, 1);
diff_sq_.Reshape(bottom[0]->num(), bottom[0]->channels(), 1, 1);
dist_sq_.Reshape(bottom[0]->num(), 1, 1, 1);
// vector of ones used to sum along channels
summer_vec_.Reshape(bottom[0]->channels(), 1, 1, 1);
for (int i = 0; i < bottom[0]->channels(); ++i)
summer_vec_.mutable_cpu_data()[i] = Dtype(1);
}前面说到这种siamese network的输入是两个图片,那么为啥这里在检测底层Blob的时候有三个呢?从后面的前馈函数可以看到,其实bottom[2]是标签!也就是两个图片是否相似。
3.4 前馈反馈函数:
前馈:
template <typename Dtype>
void ContrastiveLossLayer<Dtype>::Forward_cpu(
const vector<Blob<Dtype>*>& bottom,
vector<Blob<Dtype>*>* top) {
int count = bottom[0]->count();
caffe_sub(
count,
bottom[0]->cpu_data(), // a
bottom[1]->cpu_data(), // b
diff_.mutable_cpu_data()); // a_i-b_i
const int channels = bottom[0]->channels();
Dtype margin = this->layer_param_.contrastive_loss_param().margin();
Dtype loss(0.0);
for (int i = 0; i < bottom[0]->num(); ++i) {
dist_sq_.mutable_cpu_data()[i] = caffe_cpu_dot(channels,
diff_.cpu_data() + (i*channels), diff_.cpu_data() + (i*channels));
if (static_cast<int>(bottom[2]->cpu_data()[i])) { // similar pairs
loss += dist_sq_.cpu_data()[i];
} else { // dissimilar pairs
loss += std::max(margin-dist_sq_.cpu_data()[i], Dtype(0.0));
}
}
loss = loss / static_cast<Dtype>(bottom[0]->num()) / Dtype(2);
(*top)[0]->mutable_cpu_data()[0] = loss;
}前馈的过程很简单,按照公式进行计算就好了。另外从代码中还可以看到,在前馈的公式中y表示是否相似,是一个0,1变量。
反馈:
template <typename Dtype>
void ContrastiveLossLayer<Dtype>::Backward_cpu(const vector<Blob<Dtype>*>& top,
const vector<bool>& propagate_down, vector<Blob<Dtype>*>* bottom) {
Dtype margin = this->layer_param_.contrastive_loss_param().margin();
for (int i = 0; i < 2; ++i) {
if (propagate_down[i]) {
const Dtype sign = (i == 0) ? 1 : -1;
const Dtype alpha = sign * top[0]->cpu_diff()[0] /
static_cast<Dtype>((*bottom)[i]->num());
int num = (*bottom)[i]->num();
int channels = (*bottom)[i]->channels();
for (int j = 0; j < num; ++j) {
Dtype* bout = (*bottom)[i]->mutable_cpu_diff();
if (static_cast<int>((*bottom)[2]->cpu_data()[j])) { // similar pairs
caffe_cpu_axpby(
channels,
alpha,
diff_.cpu_data() + (j*channels),
Dtype(0.0),
bout + (j*channels));
} else { // dissimilar pairs
if ((margin-dist_sq_.cpu_data()[j]) > Dtype(0.0)) {
caffe_cpu_axpby(
channels,
-alpha,
diff_.cpu_data() + (j*channels),
Dtype(0.0),
bout + (j*channels));
} else {
caffe_set(channels, Dtype(0), bout + (j*channels));
}
}
}
}
}
}这里的计算过程也很简单,按照前面原理介绍中提到的公式来计算就好了。不过 有一个疑问,没有弄懂:
应该来说,这个层是整个网络中最后一层了,那么误差也就是在这里面计算的,也就是loss嘛,但是前馈的时候,将loss存入top.cpu_data中的。而反馈的时候,误差传递用的却是top.cpu_dff,那么top.cpu_diff是哪里来的呢?
4 EuclideanLossLayer:
@brief Computes the Euclidean (L2) loss:
for real-valued regression tasks.
@param bottom input Blob vector (length 2)-# @f$ (N \times C \times H \times W) @f$
the predictions:
-# @f$ (N \times C \times H \times W) @f$
the targets
This can be used for least-squares regression tasks. An InnerProductLayer input to a EuclideanLossLayer exactly formulates a linear least squares regression problem. With non-zero weight decay the problem becomes one of ridge regression -- see src/caffe/test/test_sgd_solver.cpp for a concrete example wherein we check that the gradients computed for a Net with exactly this structure match hand-computed gradient formulas for ridge regression.
(Note: Caffe, and SGD in general, is certainly \b not the best way to solve linear least squares problems! We use it only as an instructive example.)
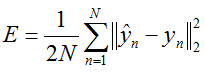
4.1 原理介绍:
前馈的过程就直接按照上面的公式计算即可;反馈的过程其实更简单,因为上面的导数:
4.2 前馈反馈函数:
template <typename Dtype>
void EuclideanLossLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
vector<Blob<Dtype>*>* top) {
int count = bottom[0]->count();
caffe_sub(
count,
bottom[0]->cpu_data(),
bottom[1]->cpu_data(),
diff_.mutable_cpu_data());
Dtype dot = caffe_cpu_dot(count, diff_.cpu_data(), diff_.cpu_data());
Dtype loss = dot / bottom[0]->num() / Dtype(2);
(*top)[0]->mutable_cpu_data()[0] = loss;
}
template <typename Dtype>
void EuclideanLossLayer<Dtype>::Backward_cpu(const vector<Blob<Dtype>*>& top,
const vector<bool>& propagate_down, vector<Blob<Dtype>*>* bottom) {
for (int i = 0; i < 2; ++i) {
if (propagate_down[i]) {
const Dtype sign = (i == 0) ? 1 : -1;
const Dtype alpha = sign * top[0]->cpu_diff()[0] / (*bottom)[i]->num();
caffe_cpu_axpby(
(*bottom)[i]->count(), // count
alpha, // alpha
diff_.cpu_data(), // a
Dtype(0), // beta
(*bottom)[i]->mutable_cpu_diff()); // b
}
}
}因为这里比较简单,就不啰嗦了,只是比较奇怪的是, 为什么反馈的时候会对标签y做偏导计算呢?好奇怪!!当然如果不要将y理解成标签,将这种欧氏loss理解层和上面介绍的loss同样的效果,那么对y求偏导也是可以理解的。
5 HingeLossLayer:
@brief Computes the hinge loss for a one-of-many classification task.
@param bottom input Blob vector (length 2)
-# @f$ (N \times C \times H \times W) @f$
the predictions @f$ t @f$, a Blob with values in

indicating the predicted score for each of the
classes. In an SVM, @f$ t @f$ is the result of taking the inner product

of the D-dimensional features

and the learned hyperplane parameters

so a Net with just an InnerProductLayer (with num_output = D) providing predictions to a HingeLossLayer and no other learnable parameters or losses is equivalent to an SVM.
-# @f$ (N \times 1 \times 1 \times 1) @f$
the labels @f$ l @f$, an integer-valued Blob with values
indicating the correct class label among the @f$ K @f$ classes
@param top output Blob vector (length 1)
-# @f$ (1 \times 1 \times 1 \times 1) @f$
the computed hinge loss:

for the @f$ L^p @f$ norm
(defaults to @f$ p = 1 @f$, the L1 norm; L2 norm, as in L2-SVM, is also available), and

In an SVM,
is the result of taking the inner product
of the features

and the learned hyperplane parameters
So, a Net with just an InnerProductLayer (with num_output = @f$k@f$) providing predictions to a HingeLossLayer is equivalent to an SVM (assuming it has no other learned outside the InnerProductLayer and no other losses outside the HingeLossLayer).
5.1 原理介绍:
前馈的原理已经在上面说明了。
那么反馈的时候是怎么做的呢?
Gradients cannot be computed with respect to the label inputs (bottom[1]), so this method ignores bottom[1] and requires !propagate_down[1], crashing if propagate_down[1] is set.
@param top output Blob vector (length 1), providing the error gradient with respect to the outputs
-# @f$ (1 \times 1 \times 1 \times 1) @f$
This Blob's diff will simply contain the

as 


hence

(*Assuming that this top Blob is not used as a bottom (input) by any other layer of the Net.)
@param propagate_down see Layer::Backward.
propagate_down[1] must be false as we can't compute gradients with respect to the labels.
@param bottom input Blob vector (length 2)
-# @f$ (N \times C \times H \times W) @f$
the predictions @f$t@f$; Backward computes diff
-# @f$ (N \times 1 \times 1 \times 1) @f$
the labels -- ignored as we can't compute their error gradients

5.2 前馈和反馈函数:
前馈:
template <typename Dtype>
void HingeLossLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
vector<Blob<Dtype>*>* top) {
const Dtype* bottom_data = bottom[0]->cpu_data();
Dtype* bottom_diff = bottom[0]->mutable_cpu_diff();
const Dtype* label = bottom[1]->cpu_data();
int num = bottom[0]->num();
int count = bottom[0]->count();
int dim = count / num;
caffe_copy(count, bottom_data, bottom_diff);
for (int i = 0; i < num; ++i) {
bottom_diff[i * dim + static_cast<int>(label[i])] *= -1;
}
for (int i = 0; i < num; ++i) {
for (int j = 0; j < dim; ++j) {
bottom_diff[i * dim + j] = std::max(
Dtype(0), 1 + bottom_diff[i * dim + j]);
}
}
Dtype* loss = (*top)[0]->mutable_cpu_data();
switch (this->layer_param_.hinge_loss_param().norm()) {
case HingeLossParameter_Norm_L1:
loss[0] = caffe_cpu_asum(count, bottom_diff) / num;
break;
case HingeLossParameter_Norm_L2:
loss[0] = caffe_cpu_dot(count, bottom_diff, bottom_diff) / num;
break;
default:
LOG(FATAL) << "Unknown Norm";
}
}这里,其实不是很难理解。从上面的计算过程来看,相当于是先将bottom_data拷贝到bottom_diff中,然后对bottom_diff中的数据一部分乘以了-1,注意,乘以-1的只是该图片对应的标签位置(可以参考手写数字识别的时候,那个标签是怎么做的)。后面开始做+1的操作,按照公式来看,其实是max(0, 1-bottom_diff),但由于bottom_diff中只是很小的一部分数据乘以了-1,所以在代码中在做+1操作时,其实对应的公式应该是

那么在前馈的公式中 t 也就是bottom_data(拷贝到了bottom_diff中)。
前馈的最后就没什么好说的,做1阶范数或者2阶范数。
反馈:
template <typename Dtype>
void HingeLossLayer<Dtype>::Backward_cpu(const vector<Blob<Dtype>*>& top,
const vector<bool>& propagate_down, vector<Blob<Dtype>*>* bottom) {
if (propagate_down[1]) {
LOG(FATAL) << this->type_name()
<< " Layer cannot backpropagate to label inputs.";
}
if (propagate_down[0]) {
Dtype* bottom_diff = (*bottom)[0]->mutable_cpu_diff();
const Dtype* label = (*bottom)[1]->cpu_data();
int num = (*bottom)[0]->num();
int count = (*bottom)[0]->count();
int dim = count / num;
for (int i = 0; i < num; ++i) {
bottom_diff[i * dim + static_cast<int>(label[i])] *= -1;
}
const Dtype loss_weight = top[0]->cpu_diff()[0];
switch (this->layer_param_.hinge_loss_param().norm()) {
case HingeLossParameter_Norm_L1:
caffe_cpu_sign(count, bottom_diff, bottom_diff);
caffe_scal(count, loss_weight / num, bottom_diff);
break;
case HingeLossParameter_Norm_L2:
caffe_scal(count, loss_weight * 2 / num, bottom_diff);
break;
default:
LOG(FATAL) << "Unknown Norm";
}
}
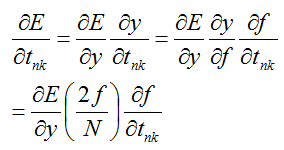
}前馈中的max(0, 1 - {l_n = k} t_nk)令为f,那么对t_nk的偏导可以写为:(2-范数为例)
在别的地方看到:
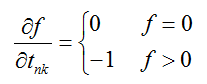
其实不太理解这是为什么!!!因为 f>0 的地方为啥只能是 l_n=k 的时候呢?
6 InfogainLossLayer:
A generalization of MultinomialLogisticLossLayer that takes an "information gain" (infogain) matrix specifying the "value" of all label pairs.
6.1 原理介绍:
输入:
-
形状:






 预测值
预测值







 内, 表示这预测每一类的概率,共
内, 表示这预测每一类的概率,共

 个类, 每一个预测 概率
个类, 每一个预测 概率
 的和为1:
的和为1:






 .
. -
形状:
标签值:
 , 是一个整数值,其范围是
, 是一个整数值,其范围是


 表示着在
个类中的索引。
表示着在
个类中的索引。 -
形状:
(可选) 信息增益矩阵
.作为第三个输入参数,. 如果
 , 则它等价于多项式逻辑损失函数
, 则它等价于多项式逻辑损失函数
输出:
形状:
计算公式:








 , 其中
表示 行
of
.
, 其中
表示 行
of
.
6.2 属性变量:
Blob<Dtype> infogain_;这个变量也就是前面介绍的H。
6.3 构造函数:
template <typename Dtype>
void InfogainLossLayer<Dtype>::LayerSetUp(
const vector<Blob<Dtype>*>& bottom, vector<Blob<Dtype>*>* top) {
LossLayer<Dtype>::LayerSetUp(bottom, top);
if (bottom.size() < 3) {
CHECK(this->layer_param_.infogain_loss_param().has_source())
<< "Infogain matrix source must be specified.";
BlobProto blob_proto;
ReadProtoFromBinaryFile(
this->layer_param_.infogain_loss_param().source(), &blob_proto);
infogain_.FromProto(blob_proto);
}
}
template <typename Dtype>
void InfogainLossLayer<Dtype>::Reshape(
const vector<Blob<Dtype>*>& bottom, vector<Blob<Dtype>*>* top) {
LossLayer<Dtype>::Reshape(bottom, top);
Blob<Dtype>* infogain = NULL;
if (bottom.size() < 3) {
infogain = &infogain_;
} else {
infogain = bottom[2];
}
CHECK_EQ(bottom[1]->channels(), 1);
CHECK_EQ(bottom[1]->height(), 1);
CHECK_EQ(bottom[1]->width(), 1);
const int num = bottom[0]->num();
const int dim = bottom[0]->count() / num;
CHECK_EQ(infogain->num(), 1);
CHECK_EQ(infogain->channels(), 1);
CHECK_EQ(infogain->height(), dim);
CHECK_EQ(infogain->width(), dim);
}从这里可以看到,当输入的bottom只有两个时,H矩阵是需要被指定的。如果输入bottom有三个时,第三个bottom就作为H矩阵。
6.4 前馈和反馈函数:
前馈:
template <typename Dtype>
void InfogainLossLayer<Dtype>::Forward_cpu(const vector<Blob<Dtype>*>& bottom,
vector<Blob<Dtype>*>* top) {
const Dtype* bottom_data = bottom[0]->cpu_data();
const Dtype* bottom_label = bottom[1]->cpu_data();
const Dtype* infogain_mat = NULL;
if (bottom.size() < 3) {
infogain_mat = infogain_.cpu_data();
} else {
infogain_mat = bottom[2]->cpu_data();
}
int num = bottom[0]->num();
int dim = bottom[0]->count() / bottom[0]->num();
Dtype loss = 0;
for (int i = 0; i < num; ++i) {
int label = static_cast<int>(bottom_label[i]);
for (int j = 0; j < dim; ++j) {
Dtype prob = std::max(bottom_data[i * dim + j], Dtype(kLOG_THRESHOLD));
loss -= infogain_mat[label * dim + j] * log(prob);
}
}
(*top)[0]->mutable_cpu_data()[0] = loss / num;
}反馈:
template <typename Dtype>
void InfogainLossLayer<Dtype>::Backward_cpu(const vector<Blob<Dtype>*>& top,
const vector<bool>& propagate_down,
vector<Blob<Dtype>*>* bottom) {
if (propagate_down[1]) {
LOG(FATAL) << this->type_name()
<< " Layer cannot backpropagate to label inputs.";
}
if (propagate_down.size() > 2 && propagate_down[2]) {
LOG(FATAL) << this->type_name()
<< " Layer cannot backpropagate to infogain inputs.";
}
if (propagate_down[0]) {
const Dtype* bottom_data = (*bottom)[0]->cpu_data();
const Dtype* bottom_label = (*bottom)[1]->cpu_data();
const Dtype* infogain_mat = NULL;
if (bottom->size() < 3) {
infogain_mat = infogain_.cpu_data();
} else {
infogain_mat = (*bottom)[2]->cpu_data();
}
Dtype* bottom_diff = (*bottom)[0]->mutable_cpu_diff();
int num = (*bottom)[0]->num();
int dim = (*bottom)[0]->count() / (*bottom)[0]->num();
const Dtype scale = - top[0]->cpu_diff()[0] / num;
for (int i = 0; i < num; ++i) {
const int label = static_cast<int>(bottom_label[i]);
for (int j = 0; j < dim; ++j) {
Dtype prob = std::max(bottom_data[i * dim + j], Dtype(kLOG_THRESHOLD));
bottom_diff[i * dim + j] = scale * infogain_mat[label * dim + j] / prob;
}
}
}
}














 804
804











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









