







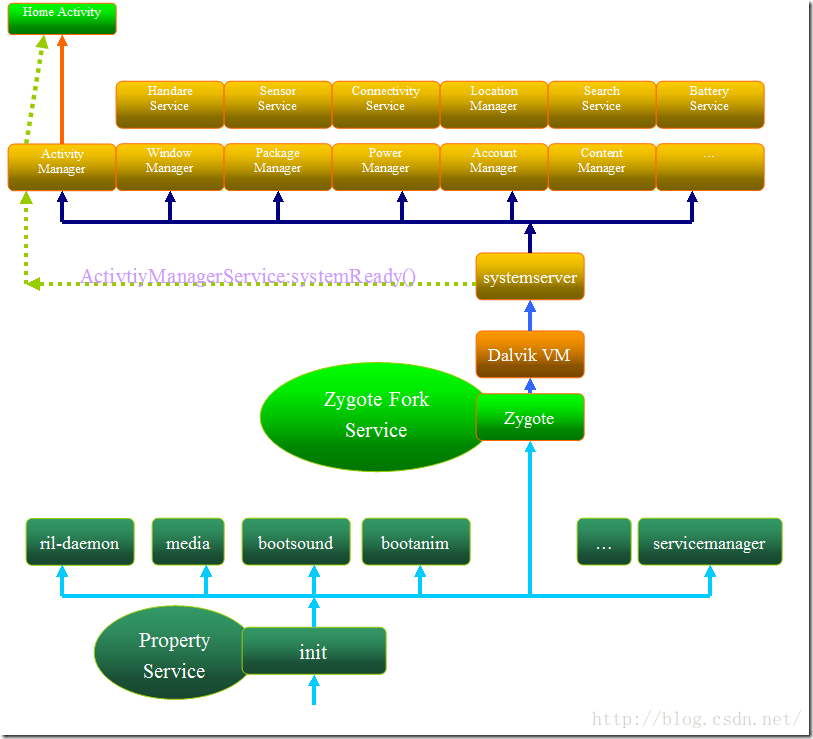
 Android系统启动涉及Linux内核启动和Android框架启动。Linux内核启动后,执行第一个用户级进程init,接着是Android框架的启动,包括Init进程解析Init.rc文件,启动Nativie服务如ServiceManager,zygote服务,System Server进程,直至Home应用启动。Init进程在Android中扮演关键角色,负责文件夹创建、挂载、服务启动等任务。
Android系统启动涉及Linux内核启动和Android框架启动。Linux内核启动后,执行第一个用户级进程init,接着是Android框架的启动,包括Init进程解析Init.rc文件,启动Nativie服务如ServiceManager,zygote服务,System Server进程,直至Home应用启动。Init进程在Android中扮演关键角色,负责文件夹创建、挂载、服务启动等任务。
As we all know,Android手机系统本质上是一个基于Linux的应用程序,它以Linux系统为内核。因此系统的启动过程包括Linux内核启动和Android框架启动两个阶段。
Linux内核启动
1、装载引导程序bootloader
Linux内核启动时首先装载执行bootloader引导程序,装载完成后进入内核程序。
2、加载Linux内核
Linux内核加载主要包括初始化kernel核心(内存初始化,打开中断,初始化进程表等)、初始化驱动、启动内核后台(daemons)线程、安装根(root)文件系统等。
Linux加载的最后阶段启动执行第一个用户级进程init(内核引导参数上一般都会设置“init=/init”,由kernel自动执行,PID为1,是所有进程的父进程)。由此进入Android框架的启动阶段。
android框架的启动
Android框架的启动始于init进程,这个阶段也是本文要重点讲解的。概括起来启动过程可以分为以下几个主要的阶段:
1、init进程启动
2、init.rc脚本启动
3、zygote服务启动
4、System Server进程启动
5、Home应用启动
1、init进程启动
2、init.rc脚本启动
3、zygote服务启动
4、System Server进程启动
5、Home应用启动
下面将从Android5.0源码中,和网络达人对此的总结中,对此过程加以学习了解和总结,
以下学习过程中代码片段中均有省略不完整,请参照源码。
以下学习过程中代码片段中均有省略不完整,请参照源码。
Init进程的启动
init是一个进程,确切地说,它是Linux系统中用户空间的第一个进程。由于Android是基于Linux内核的,所以init也是Android系统中用户空间的第一个进程,它的进程号是1。

init进程的入口函数是main,system\core\init\init.c
init进程可以在/system/core/init找到。
init.rc文件可以在/system/core/rootdir/init.rc找到。
readme.txt可以在/system/core/init/readme.txt找到。
int main(int argc, char **argv)
{
intdevice_fd = -1;
intproperty_set_fd = -1;
intsignal_recv_fd = -1;
intkeychord_fd = -1;
int fd_count;
ints[2];
intfd;
structsigaction act;
chartmp[PROP_VALUE_MAX];
structpollfd ufds[4];
char*tmpdev;
char*debuggable;
//设置子进程退出的信号处理函数,该函数为sigchld_handler。
act.sa_handler = sigchld_handler;
act.sa_flags= SA_NOCLDSTOP;
act.sa_mask = 0;
act.sa_restorer = NULL;
sigaction(SIGCHLD, &act, 0);
......//创建一些文件夹,并挂载设备,这些是和Linux相关的,不拟做过多讨论。
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0,NULL);
mount("proc", "/proc", "proc", 0, NULL);
mount("sysfs", "/sys", "sysfs", 0, NULL);
//重定向标准输入/输出/错误输出到/dev/_null_。
open_devnull_stdio();
/*
设置init的日志输出设备为/dev/__kmsg__,不过该文件打开后,会立即被unlink了,
这样,其他进程就无法打开这个文件读取日志信息了。
*/
log_init();
//上面涉及很多和Linux系统相关的知识,不熟悉的读者可自行研究,它们不影响我们的分析
//解析init.rc配置文件
parse_config_file("/init.rc");
......
//下面这个函数通过读取/proc/cpuinfo得到机器的Hardware名,我的HTCG7手机为bravo。
get_hardware_name();
snprintf(tmp,sizeof(tmp), "/init.%s.rc", hardware);
//解析这个和机器相关的配置文件,我的G7手机对应文件为init.bravo.rc。
parse_config_file(tmp);
/*
解析完上述两个配置文件后,会得到一系列的Action(动作),下面两句代码将执行那些处于
early-init阶段的Action。init将动作执行的时间划分为四个阶段:early-init、init、
early-boot、boot。由于有些动作必须在其他动作完成后才能执行,所以就有了先后之分。哪些
动作属于哪个阶段由配置文件决定。后面会介绍配置文件的相关知识。
*/
action_for_each_trigger("early-init", action_add_queue_tail);
drain_action_queue();
/*
创建利用Uevent和Linux内核交互的socket。关于Uevent的知识,第9章中对
Vold进行分析时会做介绍。
*/
device_fd = device_init();
//初始化和属性相关的资源
property_init();
//初始化/dev/keychord设备,这和调试有关,本书不讨论它的用法。读者可以自行研究,
//内容比较简单。
keychord_fd = open_keychord();
......
/*
INIT_IMAGE_FILE定义为”/initlogo.rle”,下面这个函数将加载这个文件作为系统的开机
画面,注意,它不是开机动画控制程序bootanimation加载的开机动画文件。
*/
if(load_565rle_image(INIT_IMAGE_FILE) ) {
/*
如果加载initlogo.rle文件失败(可能是没有这个文件),则会打开/dev/ty0设备,并
输出”ANDROID”的字样作为开机画面。在模拟器上看到的开机画面就是它。
*/
......
}
}
if(qemu[0])
import_kernel_cmdline(1);
......
//调用property_set函数设置属性项,一个属性项包括属性名和属性值。
property_set("ro.bootloader", bootloader[0] ? bootloader :"unknown");
......//执行位于init阶段的动作
action_for_each_trigger("init", action_add_queue_tail);
drain_action_queue();
//启动属性服务
property_set_fd = start_property_service();
/*
调用socketpair 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1613
1613

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









