






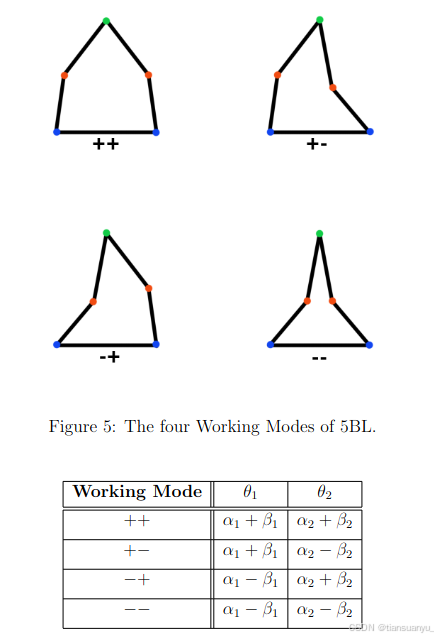
一个末端的坐标经过逆运动学解算会得到4个解(4个电机角度),对应四种工作模式。
正表示凸,负表示凹。
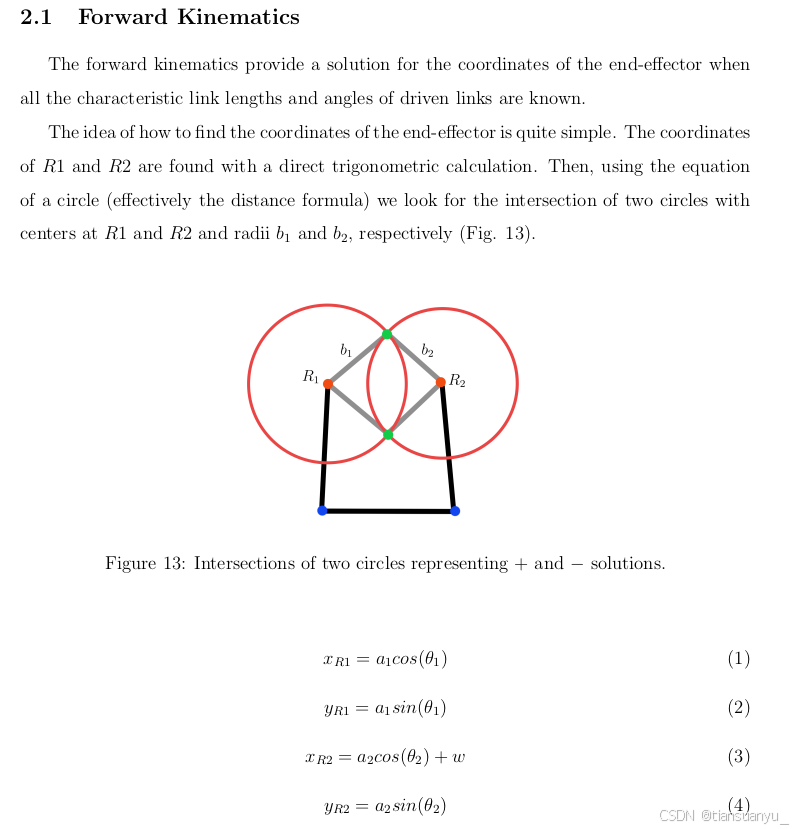
对于正运动学解算,一组电机角度会得到两个末端坐标,分别是凹和凸。
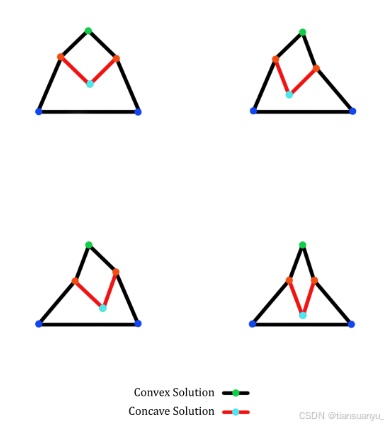
总结:4个工作模式,2个解。
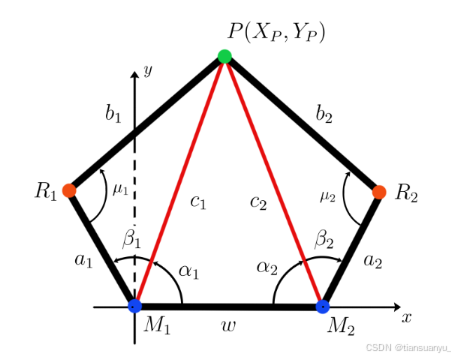
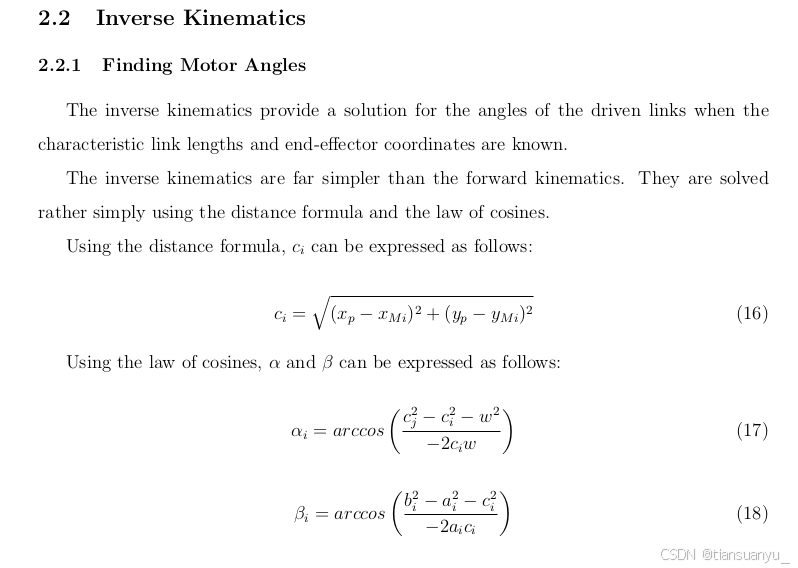
运动学解算数学表达式:




/**
* @brief 工作模式枚举
*
* PP:
* PN:
* NP:
* NN:
*/
enum inverse_mode {
PP,
PN,
NP,
NN
};
/**
* @brief 工作模式枚举
*/
enum forward_mode {
CONVEX,
CONCAVE
};
void forwardKinematics(){
theta1 = motor1.getangle();
theta2 = motor2.getangle();
xR1 = a1 * cos(theta1);
yR1 = a1 * sin(theta1);
// Calculate coordinates of R2
xR2 = a2 * cos(theta2) + w;
yR2 = a2 * sin(theta2);
// Calculate squared distances b1 and b2
b1_squared = pow(xP - *xR1, 2) + pow(yP - *yR1, 2);
b2_squared = pow(xP - *xR2, 2) + pow(yP - *yR2, 2);
// Function to calculate xP
v1 = (yR1 - yR2) / (xR2 - xR1);
v2 = (b1_squared - b2_squared - a1_squared + a2_squared + xR2 * xR2 + yR2 * yR2) / (2 * (xR2 - xR1));
xP = v1 * yP + v2;
// Function to calculate yP
v3 = 1 + v1 * v1;
v4 = 2 * (v1 * v2 - xR1 * v1 - yR1);
v5 = a1 * a1 * b1_squared - 2 * v2 * xR1 + v2 * v2;
discriminant = v4 * v4 - 4 * v3 * v5;
yP1 = (-v4 + sqrt(discriminant)) / (2 * v3);//凸,convex
yP2 = (-v4 - sqrt(discriminant)) / (2 * v3);//凹,concave
}
void inverseKinematics(){
// 定义变量
double x_p, y_p, x_M1, y_M1, x_M2, y_M2, c1_squared, c2_squared, w, a1, a2, b1_squared, b2_squared;
// 计算 c1_squared 和 c2_squared
c1_squared = pow(x_p - x_M1, 2) + pow(y_p - y_M1, 2);
c2_squared = pow(x_p - x_M2, 2) + pow(y_p - y_M2, 2);
// 简化 c2_squared 的表达式
//c2_squared = pow(x_p - w, 2) + pow(y_p, 2);
// = x_p * x_p - 2 * x_p * w + pow(w, 2) + y_p * y_p;
c2_squared = c1_squared - 2 * x_p * w + pow(w, 2);
// 计算 alpha1
alpha1 = acos(x_p / c1);
// 计算 alpha2
alpha2 = acos((-(x_p - w) / c2));
// 计算 beta,有两个解,注意筛选
beta1 = acos((b_i_squared - pow(a_i, 2) - ci_squared) / (-2 * a_i * ci));
beta2 = acos((b_i_squared - pow(a_i, 2) - ci_squared) / (-2 * a_i * ci));
//motor_set_angle(motor1, theta1);
//motor_set_angle(motor2, theta2);
}
//为了顺滑输出,需要调整
void loop() {
forwardKinematics();
X = X + Kp_X * (X_demand - X);
Y = Y + Kp_Y * (Y_demand - Y);
inverseKinematics();
}参考文献:
Gamble, Brandon J., "5-Bar Linkage Kinematic Solver and Simulator" (2020). UVM Honors College Senior
Theses. 406.
https://scholarworks.uvm.edu/hcoltheses/406


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









