






四轮独立驱动横摆角速度控制,LQR 基于LQR算法的 基于二自由度动力学方程,通过主动转向afs和直接横摆力矩dyc实现的横摆角速度跟踪 ,模型包括期望横摆角速度,质心侧偏角,稳定性因素,lqr模块等模块,作为lqr入门强烈推荐。
还有详细的lqr资料说明,可以作为基本模板,和其他算法(mpc smc)做对比等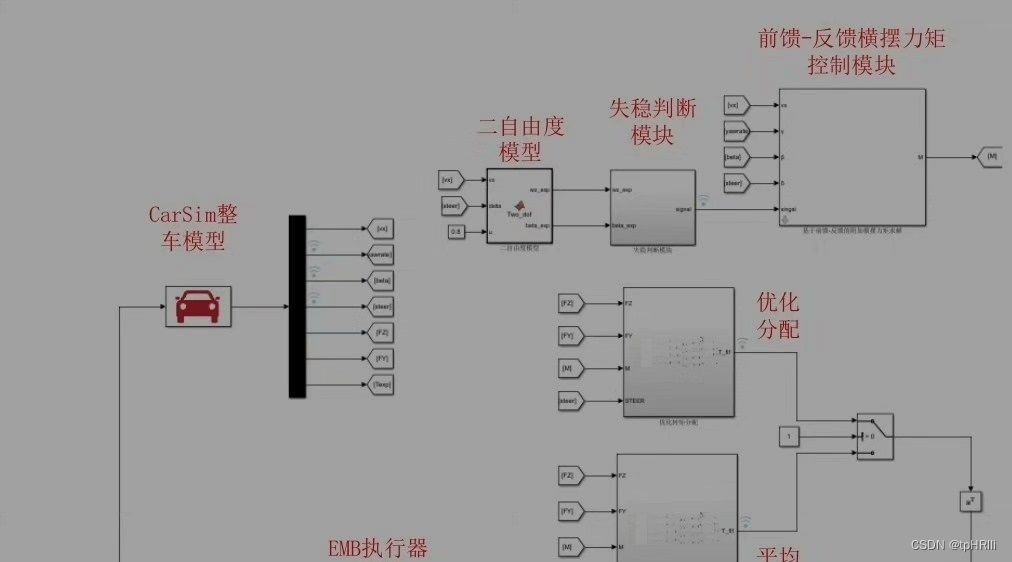
四轮独立驱动横摆角速度控制是一种高级的车辆稳定性控制技术,它的核心在于通过精准的角速度控制保证车辆在高速行驶或者急弯驶入时的稳定性。LQR算法是其中的一个重要组成部分,它可以借助车辆二自由度动力学方程,通过主动转向AFS和直接横摆力矩DYC实现横摆角速度跟踪。
具体来讲,LQR算法在四轮独立驱动横摆角速度控制中的应用可以被分为多个模块,其中包括期望横摆角速度,质心侧偏角,稳定性因素,以及LQR模块等。通过这些模块的协同作用,系统可以达到精准的横摆角速度控制,使得车辆在高速行驶和急弯驶入时可以保持良好的稳定性,对驾驶员来说也是一种有效的安全保障。
LQR算法是一种常用的控制算法,它可以通过最小化系统的状态变量与控制输入的加权和,来实现一定的最优控制效果。在四轮独立驱动横摆角速度控制中,LQR算法可以被应用于车辆的状态观测和控制,在实践中表现出了很高的准确性和可靠性。
除了上述的应用场景外,LQR算法在其他领域也有广泛的应用。在控制理论中,LQR算法是一种基于状态空间方法的最优控制算法,它可以被广泛应用于机械、电子、航空航天等领域的控制问题中。与其他控制算法如MPC、SMC相比,LQR算法更加简单实用,适用于实时控制和自适应控制等实际应用场景。
总而言之,四轮独立驱动横摆角速度控制是一种重要的车辆稳定性控制技术,LQR算法在其中的应用具有重要价值。通过LQR算法的应用,车辆可以在高速行驶和急弯驶入时保持稳定性,为驾驶员带来安全保障。同时,LQR算法在其他领域也有广泛应用,对于控制理论和实际应用都有着重要意义。因此,我们强烈推荐LQR算法作为入门级别的控制算法开始学习。
相关代码,程序地址:http://lanzouw.top/702813958411.html















 204
204











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









