






四轮独立驱动横摆角速度控制,LQR 基于LQR算法的 基于二自由度动力学方程,通过主动转向afs和直接横摆力矩dyc实现的横摆角速度跟踪 ,模型包括期望横摆角速度,质心侧偏角,稳定性因素,lqr模块等模块,作为lqr入门强烈推荐。
还有详细的lqr资料说明,可以作为基本模板,和其他算法(mpc smc)做对比等
ID:73100702813958411
车辆工程
四轮独立驱动横摆角速度控制
概述
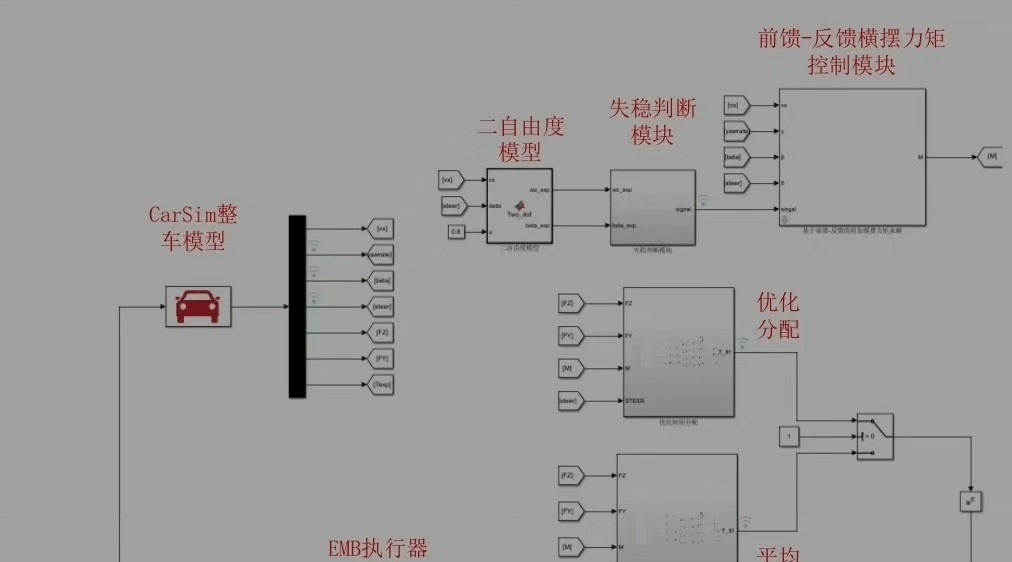
在现代汽车控制系统中,横摆角速度控制是一项重要的技术。本文将介绍一种基于LQR算法的四轮独立驱动横摆角速度控制方法,该方法通过主动转向AFS和直接横摆力矩DYC实现横摆角速度的跟踪。该控制系统的模型包括期望横摆角速度、质心侧偏角、稳定性因素和LQR模块等。
LQR算法介绍
LQR(Linear Quadratic Regulator)是一种线性二次型优化方法,被广泛应用于控制系统设计中。该算法的目标是通过调整控制输入,使系统的状态尽可能接近期望状态。在本文的四轮独立驱动横摆角速度控制中,LQR算法被用于计算主动转向AFS和直接横摆力矩DYC。
控制系统模型
四轮独立驱动横摆角速度控制系统的模型包括期望横摆角速度、质心侧偏角、稳定性因素和LQR模块。
-
期望横摆角速度
期望横摆角速度是指车辆在实际行驶中期望达到的横摆角速度。该值可以通过预先设置或者根据路况自动调整。 -
质心侧偏角
质心侧偏角是指车辆质心相对于车辆行驶方向的侧向偏角。通过传感器获取质心侧偏角的值,可以用于判断车辆是否出现侧向偏移。 -
稳定性因素
稳定性因素是指影响车辆稳定性的各种因素,例如车辆动力学特性、路面摩擦系数等。通过对这些因素的建模和分析,可以为横摆角速度控制系统提供准确的参数。 -
LQR模块
LQR模块是整个控制系统的核心,通过优化控制输入,使系统的状态尽可能接近期望状态。在四轮独立驱动横摆角速度控制系统中,LQR模块被用于计算主动转向AFS和直接横摆力矩DYC。
控制系统实现
在实际的控制系统中,为了实现四轮独立驱动的横摆角速度控制,需要进行以下步骤:
-
系统建模
首先,需要对整个系统进行建模,包括车辆动力学模型、转向系统模型、横摆力矩模型等。通过建立准确的模型,可以为后续的控制算法提供准确的输入和输出。 -
LQR参数计算
根据系统模型和期望横摆角速度,可以通过LQR算法计算得到主动转向AFS和直接横摆力矩DYC的参数。通过调整参数,可以使控制系统的响应更加灵敏和稳定。 -
执行控制
通过实时监测质心侧偏角和稳定性因素,控制系统可以根据LQR算法计算得到的参数,实时调整主动转向AFS和直接横摆力矩DYC。通过这种方式,可以使车辆在行驶过程中始终保持期望的横摆角速度。
LQR算法的优点
LQR算法在控制系统设计中有以下优点:
-
控制效果好:通过优化控制输入,可以使系统的状态尽可能接近期望状态,从而提高横摆角速度控制的效果。
-
算法简单:LQR算法基于线性二次型优化,计算过程相对简单,容易实现。
-
灵活性高:LQR算法可以根据实际需求进行参数调整,适用于不同的控制系统。
-
鲁棒性强:LQR算法对模型误差和测量误差具有一定的鲁棒性,可以在一定程度上抵抗噪声和干扰。
结论
本文介绍了一种基于LQR算法的四轮独立驱动横摆角速度控制方法。通过主动转向AFS和直接横摆力矩DYC实现横摆角速度的跟踪。该控制系统的模型包括期望横摆角速度、质心侧偏角、稳定性因素和LQR模块等。LQR算法作为一种优化方法,在控制系统设计中具有广泛的应用前景。同时,本文还提到了LQR算法的优点和特点,以及实际应用中的步骤和注意事项。希望通过本文的介绍,读者对四轮独立驱动横摆角速度控制有更深入的了解,并能够在实际应用中灵活运用。对于初学者来说,LQR算法是一种入门级的优化方法,强烈推荐作为学习和实践的基础模板。除此之外,还提到了与其他算法(MPC、SMC)的对比,为读者提供了更多的信息和学习资源。
【相关代码,程序地址】:http://fansik.cn/702813958411.html
















 476
476

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









