






 本文详细介绍了利用MATLAB/Simulink搭建的双闭环直流电机调速系统,涉及电气模型、ASR和ACR控制器设计,以及如何通过仿真优化系统性能和确保稳定性。
本文详细介绍了利用MATLAB/Simulink搭建的双闭环直流电机调速系统,涉及电气模型、ASR和ACR控制器设计,以及如何通过仿真优化系统性能和确保稳定性。
双闭环转速、电流直流调速系统的课程设计(MATLAB仿真)
matlab/simulink搭建的双闭环直流调速系统,电气模型,采用了ASR和ACR两个PI调节器,可以再保证系统稳定的条件下实现转速无静差 可以控制直流电机的转速和电流 含说明报告
ID:1129693296561167
Ray

在现代工业中,直流电机广泛应用于各类机械设备中。而对于直流电机的调速和控制是一个非常重要的问题。为了满足实际工业应用的需求,开发出了各种各样的控制算法和调速系统。本篇文章将围绕双闭环转速、电流直流调速系统展开讨论,并结合MATLAB仿真进行课程设计。
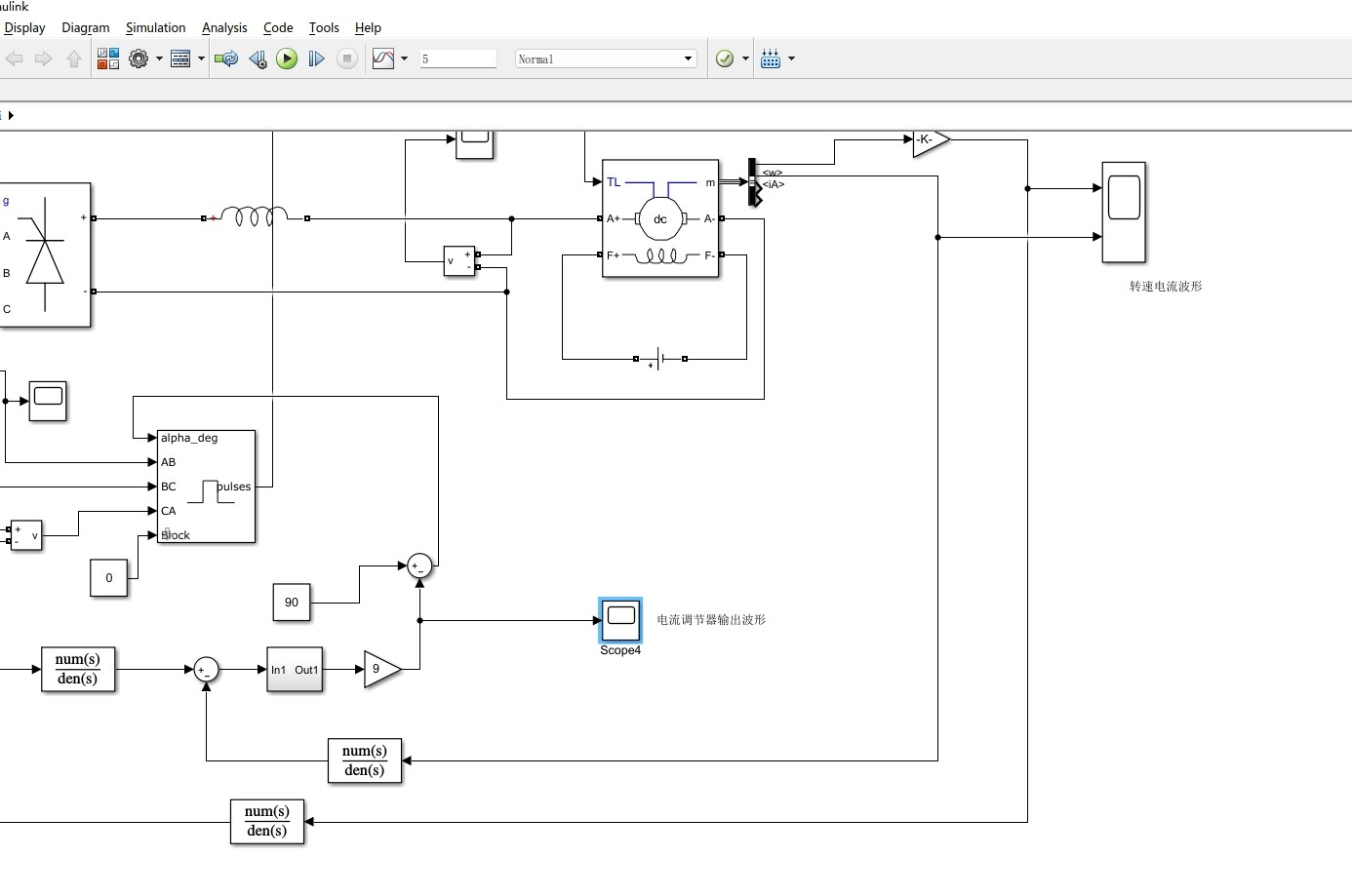
在直流电机的调速系统中,双闭环调速系统是一种常见的设计方案。该系统通过两个环节的控制,分别对电机的转速和电流进行调节,从而实现精确的控制。在本次课程设计中,我们采用了MATLAB Simulink工具来搭建双闭环直流调速系统,并进行仿真分析。
首先,我们需要建立直流电机的电气模型。直流电机的电气模型可以用方程表示,其中包括电压方程、电流方程和转速方程等。这些方程通过电机的参数和控制信号之间的关系来描述电机的动态特性。在MATLAB Simulink中,我们可以通过建立模块来实现这些方程的计算和求解。
接下来,我们需要设计双闭环调速系统的控制器。在本次课程设计中,我们采用了ASR和ACR两个PI调节器作为控制器。ASR(速度比例积分调节器)用来控制电机的转速,而ACR(电流比例积分调节器)用来控制电机的电流。这两个调节器可以根据输入信号和反馈信号之间的差异来调整输出信号,从而实现转速和电流的精确控制。
为了保证系统稳定,我们还需要设计合适的参数和限制条件。例如,在双闭环调速系统中,我们可以通过调整调节器的比例增益和积分时间常数来优化系统性能。此外,还可以限制输出信号的幅值和变化率,以避免系统运行过程中的不稳定性和振荡现象。
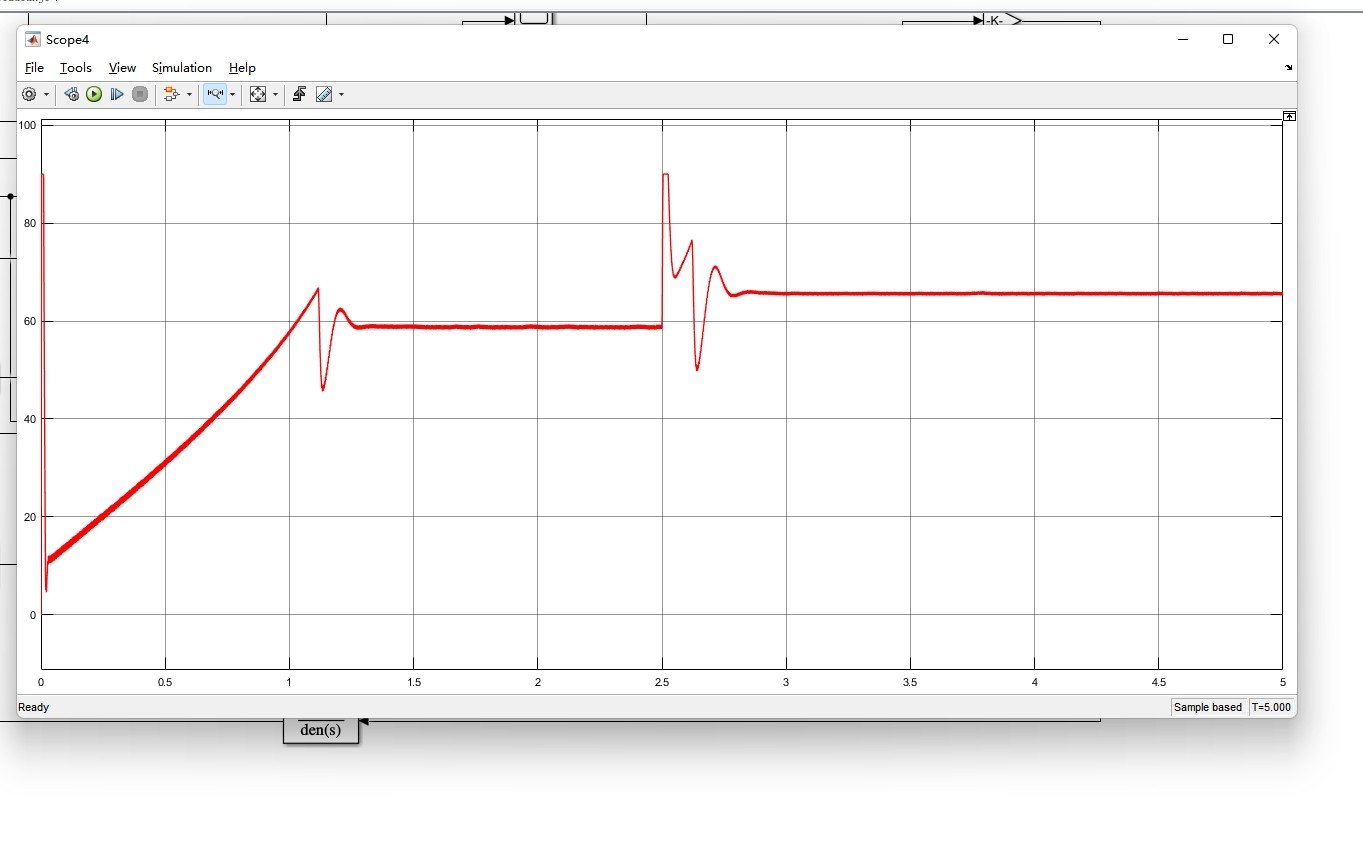
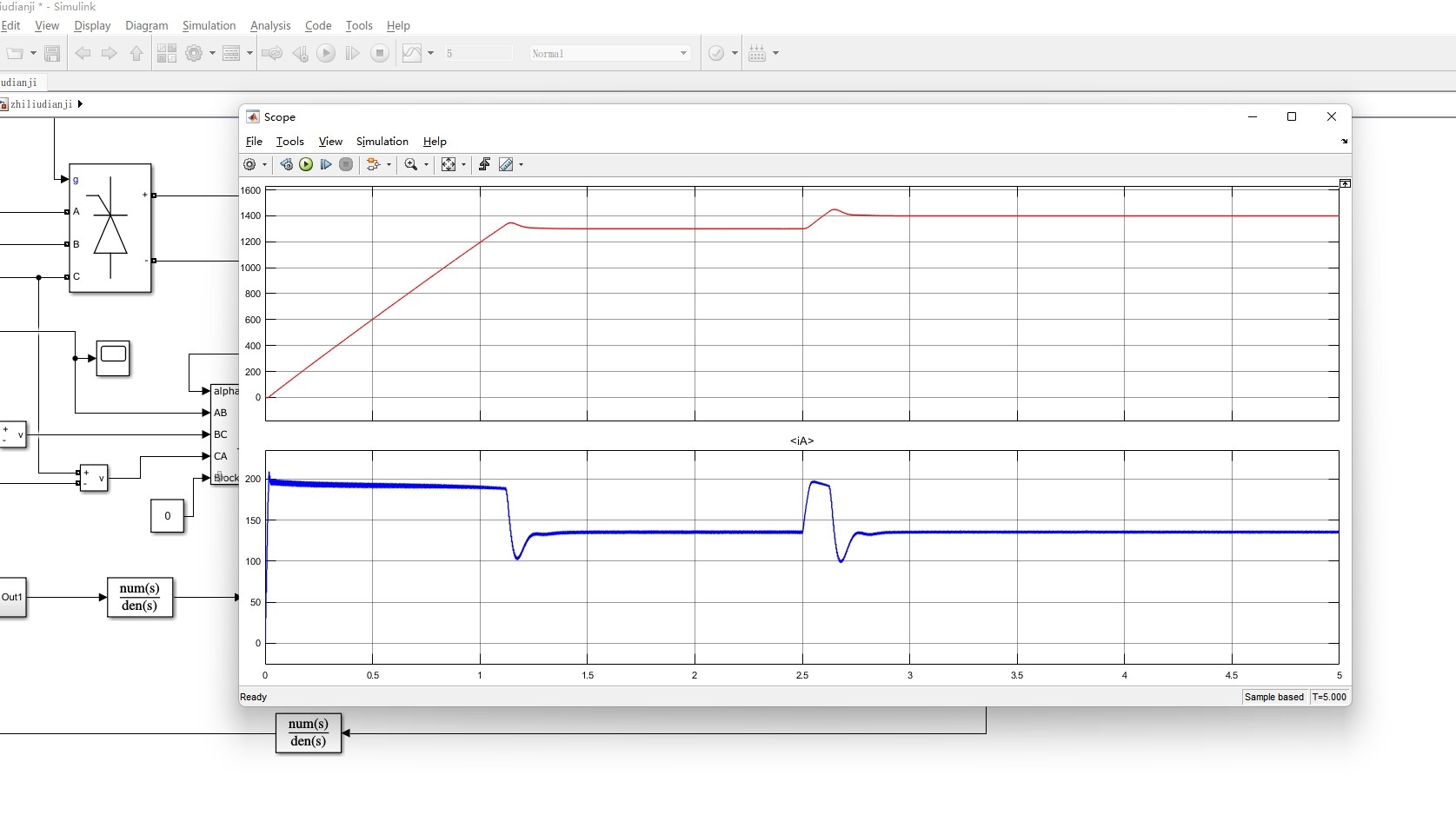
在MATLAB Simulink中进行仿真时,我们可以通过设置合适的输入信号来模拟实际工业场景中的工作条件。例如,我们可以采用不同的转速和负载来测试系统的响应速度和稳定性。通过观察仿真结果,我们可以评估系统的控制性能,并进行参数调整和优化。
最后,在课程设计的说明报告中,我们需要对系统的设计和仿真结果进行详细的说明和分析。这包括系统的电气模型建立过程、双闭环调速系统的控制器设计、仿真结果的分析和优化方案等。通过深入的分析和讨论,读者可以更好地理解直流电机调速系统的工作原理和设计方法,并在实际应用中得到启发。
总之,本篇文章围绕双闭环转速、电流直流调速系统展开了详细的讨论和分析。通过MATLAB Simulink的仿真设计,我们可以更好地理解和掌握直流电机调速系统的设计和优化方法。希望本文对读者在工业应用中的电机控制和调速问题提供了一些有价值的参考和启示。
【相关代码 程序地址】: http://nodep.cn/693296561167.html


















 6562
6562

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









