







Graham扫描法
时间复杂度:O(n㏒n)
思路:Graham扫描的思想和Jarris步进法类似,也是先找到凸包上的一个点,然后从那个点开始按逆时针方向逐个找凸包上的点,但它不是利用夹角。
步骤:
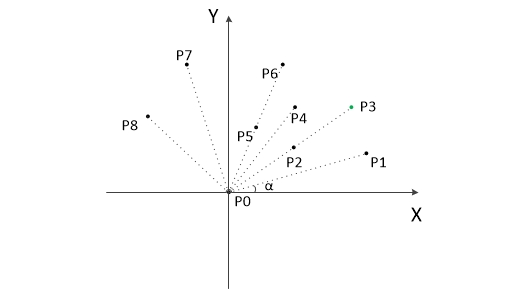
- 把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,如图中的P0。
- 把所有点的坐标平移一下,使 P0 作为原点,如上图。
- 计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P0 比较近的排在前面。例如上图得到的结果为 P1,P2,P3,P4,P5,P6,P7,P8。我们由几何知识可以知道,结果中第一个点 P1 和最后一个点 P8 一定是凸包上的点。
(以上是准备步骤,以下开始求凸包)
以上,我们已经知道了凸包上的第一个点 P0 和第二个点 P1,我们把它们放在栈里面。现在从步骤3求得的那个结果里,把 P1 后面的那个点拿出来做当前点,即 P2 。接下来开始找第三个点: - 连接P0和栈顶的那个点,得到直线 L 。看当前点是在直线 L 的右边还是左边。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6。
- 如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。执行步骤4。
- 当前点是凸包上的点,把它压入栈,执行步骤7。
- 检查当前的点 P2 是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把 P2 后面那个点做当前点,返回步骤4。
最后,栈中的元素就是凸包上的点了。
以下为用Graham扫描法动态求解的过程:






下面给出求一堆点的凸包的点集的代码
typedef struct{
double x,y;
}POINT;
POINT result[101];//模拟堆栈s,保存凸包上的点
POINT tree[101];
int n,top;
double Distance(POINT p1,POINT p2){
return sqrt((p1.x-p2.x)*(p1.x-p2.x)+(p1.y-p2.y)*(p1.y-p2.y));
}
double Multiply(POINT p1,POINT p2,POINT p3){
return (p2.x-p1.x)*(p3.y-p1.y)-(p3.x-p1.x)*(p2.y-p1.y);
}
int cmp(const void *p1,const void *p2){
POINT *p3,*p4;
double m;
p3 = (POINT *)p1;
p4 = (POINT *)p2;
m = Multiply(tree[0],*p3,*p4);
if(m < 0)return 1;
else if(m == 0&&Distance(tree[0],*p3)<Distance(tree[0],*p4)){
return 1;
}else
return -1;
}
void Tubao(){
int i;
int pos;
double temp,px,py;
while(~scanf("%d",&n)){//n是输入点的个数
py = -1;
for(i = 0;i < n;i++){
scanf("%lf%lf",&tree[i].x,&tree[i].y);
}
for(i = 0;i < n;i++){
if(py == -1 || tree[i].y < py){
py = tree[i].y;
px = tree[i].x;
pos = i;
}else if(tree[i].y == py&&tree[i].x < px){
py = tree[i].y;
px = tree[i].x;
pos = i;
}
}
temp = tree[0].x;
tree[0].x = tree[pos].x;
tree[pos].x = temp;
temp = tree[0].y;
tree[0].y = tree[pos].y;
tree[pos].y = temp;
qsort(&tree[1],n-1,sizeof(double)*2,cmp);
tree[n].x = tree[0].x;
tree[n].y = tree[0].y;
result[0].x = tree[0].x;
result[0].y = tree[0].y;
result[1].x = tree[1].x;
result[1].y = tree[1].y;
result[2].x = tree[2].x;
result[2].y = tree[2].y;
top = 2;
for(i = 3;i <= n;i++){
while(Multiply(result[top-1],result[top],tree[i]) <= 0){
top--;
}
result[top+1].x = tree[i].x;
result[top+1].y = tree[i].y;
top++;
}
}














 303
303

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









