







 本文深入分析目标跟踪系统,将系统拆分为运动模型、特征提取、观测模型等部分,强调特征提取对跟踪效果的决定性影响。实验表明,HOG+颜色特征的跟踪效果最佳,而观测模型的选择在强特征下影响较小。此外,粒子滤波在尺度变化和快速移动场景中有优势,运动模型参数选择也很关键。后处理通过组合多个跟踪器能大幅提升跟踪稳定性。
本文深入分析目标跟踪系统,将系统拆分为运动模型、特征提取、观测模型等部分,强调特征提取对跟踪效果的决定性影响。实验表明,HOG+颜色特征的跟踪效果最佳,而观测模型的选择在强特征下影响较小。此外,粒子滤波在尺度变化和快速移动场景中有优势,运动模型参数选择也很关键。后处理通过组合多个跟踪器能大幅提升跟踪稳定性。
最近在看目标跟踪方面的论文,看到王乃岩博士发的一篇分析跟踪系统的文章,将目标跟踪系统拆分为多个独立的部分进行分析,比较各个部分的效果。本文主要对该论文的重点的一个大致翻译,刚入门,水平有限,如有理解错误和疏漏还请见谅。本文参考了hjl240的文章:追踪系统分模块解析(Understanding and Diagnosing Visual Tracking Systems)
近些年已经出了一些跟踪系统的评估标准,而这些评估的标准是否可以有效的判断一个跟踪系统的优缺点呢?作者针对这个问题将跟踪系统拆分成:运动模型(Motion Model)、特征提取(Feature Extractor)、观测模型(Observation Model)、模型跟踪器(Model Updater)以及总体后处理(Ensemble Post-processor)这五个部分。然后对每一个部分进行实验来评估每个部分对于跟踪结果的影响。
最终通过实验发现, feature extractor部分对于最终跟踪的效果影响最大,而很多研究中关注的observation model则对于最终结果并没有多大的影响,同时motion model 和model updater之中的一些细节会对结果有影响,当一个跟踪系统中的跟踪器种类很多时ensemble post-processor 也会使结果大幅的改善。
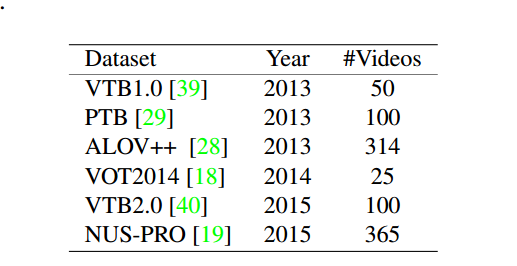
一些benchmark
- Y. Wu, J. Lim, and M.-H. Yang. Online object tracking: A benchmark. In CVPR, 2013. (AUC) 通过重合率曲线下的的面积或者是中心像素距离曲线来进行评估.
- M. Kristan and et al. . The visual object tracking VOT2014 challenge results. In ECCV Workshop, 2014. (VOT)
- L. Cehovin, A. Leonardis, and M. Kristan. Visual object tracking performance measures revisited. arXiv preprintarXiv:1502.05803, 2015
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 313
313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









