







一 引言
感知机(Perceptron)是最早的人工神经网络模型之一,由 Frank Rosenblatt 在 1957 年提出。虽然它相对简单,但在处理线性可分问题时却非常有效。本文将介绍如何使用 Python 的 scikit-learn 库来实现感知机,并通过一个简单的数据集来展示其实战效果。
二 准备工作
2.1 安装 scikit-learn
确保你的环境中已经安装了 scikit-learn。如果没有安装,可以通过 pip 安装:
pip install scikit-learn
2.2 导入必要的库
import numpy as np
import matplotlib.pyplot as plt
from sklearn.datasets import make_blobs
from sklearn.linear_model import Perceptron
from sklearn.model_selection import train_test_split
from sklearn.metrics import accuracy_score
三 创建数据集
我们将创建一个简单的二分类数据集,数据是线性可分的。
# 设置随机种子以便结果可复现
np.random.seed(42)
# 生成数据集
X, y = make_blobs(n_samples=100, centers=2, random_state=42, cluster_std=1.5)
# 将数据分为训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(X, y, test_size=0.2, random_state=42)
四 训练感知机模型
接下来,我们将使用 scikit-learn 的 Perceptron 类来训练我们的模型。
# 初始化感知机模型
perceptron = Perceptron(max_iter=1000, tol=None, random_state=42)
# 训练模型
perceptron.fit(X_train, y_train)
五 模型评估
我们使用准确率来评估模型的性能。
# 对测试集进行预测
y_pred = perceptron.predict(X_test)
# 计算准确率
accuracy = accuracy_score(y_test, y_pred)
print(f"Accuracy: {accuracy * 100:.2f}%")
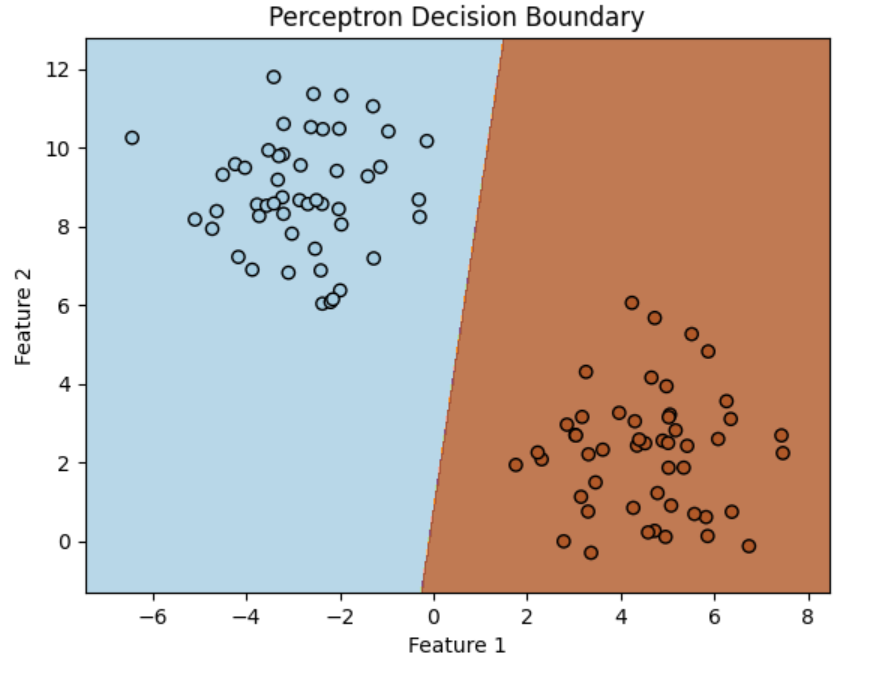
六 可视化决策边界
为了让读者更好地理解感知机的工作方式,我们将可视化训练数据及其决策边界。
def plot_decision_boundary(perceptron, X, y):
# 创建网格以绘制决策边界
h = .02 # 网格步长
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
# 预测网格中每个点的分类
Z = perceptron.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
# 绘制决策边界
plt.contourf(xx, yy, Z, cmap=plt.cm.Paired, alpha=0.8)
# 绘制训练数据点
plt.scatter(X[:, 0], X[:, 1], c=y, edgecolors='k', cmap=plt.cm.Paired)
plt.xlabel('Feature 1')
plt.ylabel('Feature 2')
plt.title('Perceptron Decision Boundary')
plt.show()
# 绘制决策边界
plot_decision_boundary(perceptron, X, y)
七 结论
通过本文的学习,您应该能够使用 scikit-learn 实现一个基本的感知机模型,并通过一个简单的二分类问题来评估和可视化其性能。尽管感知机在处理复杂的非线性数据时可能不是最佳选择,但对于线性可分的数据集来说,它是一个快速而有效的解决方案。
















 8777
8777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











