







 本文详细介绍了OPT3001照度计的IIC接口使用,包括数据通信、中断功能、IIC通信原理,以及如何通过寄存器读写获取和配置光强值。示例代码展示了测量光强的基本过程和自定义阈值报警的可能性。
本文详细介绍了OPT3001照度计的IIC接口使用,包括数据通信、中断功能、IIC通信原理,以及如何通过寄存器读写获取和配置光强值。示例代码展示了测量光强的基本过程和自定义阈值报警的可能性。
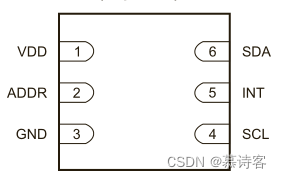
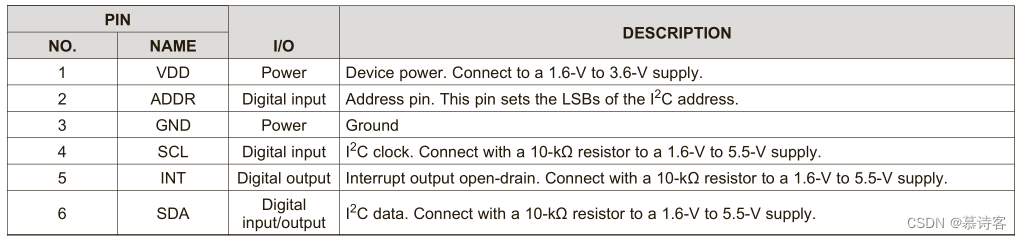
OPT3001是一款可如人眼般测量光强的单芯片照度计,测量范围0.01 lux-83k lux,使用IIC进行数据通信。它的引脚如下:
它的应用框图如下:
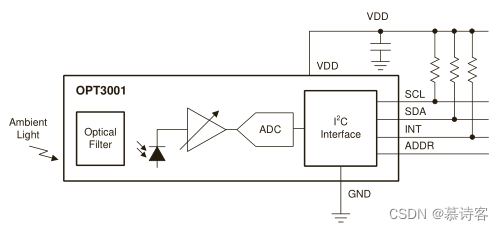
其中SCL,SDA为IIC通信脚,需接上拉电阻
ADDR的接线影响IIC通信地址

INT为中断输出,可设置光强阈值并通过该引脚触发警报
芯片采用IIC通信,有关IIC通信原理可参考:
OPT3001是一款可如人眼般测量光强的单芯片照度计,测量范围0.01 lux-83k lux,使用IIC进行数据通信。它的引脚如下:
它的应用框图如下:
其中SCL,SDA为IIC通信脚,需接上拉电阻
ADDR的接线影响IIC通信地址
INT为中断输出,可设置光强阈值并通过该引脚触发警报
芯片采用IIC通信,有关IIC通信原理可参考:
 1227
1035
4653
386
1227
1035
4653
386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























